 工业机器人常见问故障分析与处理
工业机器人常见问故障分析与处理
对机器人设备在使用过程中出现的如零点丢失、安全报警等常见问题及解决过程进行阐述说明。
1序言
工业机器人近年来发展迅速,因其重复精度高、可靠性好等优点,已经在汽车、电子及物流等多个领域得到广泛应用[1],常见的机器人品牌有KUKA、ABB、FANUC、Yaskawa、SIASUN、埃斯顿和汇川等。随着机器人应用的拓展与深入,工业机器人开始进行各类复杂系统集成,应用领域越发宽广,如浇筑、钻孔、钻铆及磨削等。机器人集成的柔性自动化系统在航空航天领域也开始应用,可逐渐实现无人化与智能化,提高生产效率。
2ABB机器人零点丢失故障
一台ABB机器人应用于火焰喷涂表面处理领域,如图1所示。设备开机后机器人示教器上显示“SMB串口测量板后备电池已丢失,机器人转数计数器数据丢失”,机器人无法执行动作,报警信息如图2所示。

图1 ABB机器人
图2 机器人示教器报警
2.1 故障原因分析
ABB机器人使用的编码器为单圈绝对值编码器,即编码器能实时反馈电动机在一圈内的位置信息,单圈内的位置信息不需要额外供电存储。由于减速机/齿轮箱的存在,机器人的某个轴旋转180°时电动机已经旋转了几十圈,电动机旋转超过一圈,编码器发出的位置又从零开始,故对于单圈绝对值编码器,还需要一个设备对电动机旋转圈数进行计数。
SMB板具有两个作用,一是模数转化,将编码器(Resolver)传过来的模拟量信号转化为数字信号;二是对电动机圈数进行计数[2]。而电动机圈数在SMB板中存储需要电源,在机器人控制柜开启时,由控制柜给SMB板供电;在关闭控制柜时,则由SMB板上的电池进行供电。
分析故障原因,可能由于电源不稳定或其他原因,会导致电动机旋转的圈数丢失。拆卸机器人本体下方SMB板上的电池,进行测量后确认故障原因是因电池电量不足而导致转数计数器数据丢失。
由于机器人电动机单圈编码器反馈的存储不需要电池,即机器人电动机单圈参考位置正确,故在人工移动机器人各轴到刻度位后的“转数计数器更新”不会影响机器人的精度。
2.2 故障处理
1)首先更换SMB板上的电池,完成后进行各轴零位校准工作。
2)以单轴运动模式手动移动机器人的各关节至零位刻度线,此时一定要以机器人本体的刻度线为准,示教器显示的数据可能已经混乱。在现场如果不能使所有轴同时移动到刻度位,则可根据实际情况先移动某一单轴。
3)进行示教器→校准→转数计数器→更新转数计数器操作,完成单轴零位校准。
4)依次完成A1~A6轴零位校准。
3KUKA机器人碰撞零点丢失故障
一台倒挂式KUKA机器人用于在自动化产线上进行零件上下料工作,如图3所示。在初期调试过程中因A1轴软限位参数设置不当而导致机器人在运动过程中发生了碰撞,A4轴电动机损坏,传动杆弯曲,如图4所示。

图3 KUKA机器人

图4A4轴电动机损坏和传动杆弯曲
KUKA机器人各轴伺服电动机使用的编码器为旋转变压器,编码器信号连接至机器人本体下方的RDC,RDC将编码器的模拟量信号转换成数字量信号传输至控制系统,由控制系统识别并记录机器人各轴当前位置。
(1)单轴零点校准 针对碰撞故障,取下A4轴电动机及连接杆进行更换。完成A4轴电动机及连杆更换后,A4、A5、A6轴零点位置数据丢失,需要重新校准,此时可使用KUKA专用的零点校准仪器EMD对机器人A4、A5、A6轴机械零点进行校准[3]。单轴零位校准步骤如下。
1)通过示教器手动操作机器人该轴移动至预零点标定位置,如图5所示。
2)操作示教器点击主菜单选择投入运行→零点标定→EMD→带负载校正→首次零点标定。
3)从窗口中选定的轴上取下测量筒的防护盖,将EMD拧到测量筒上,如图6所示。
4)将测量导线一端连接到EMD,另一端连接到KUKA机器人接线盒的X32接口上。
5)在示教器上选择需要校准的轴,点击零点标定,起动运行机器人,此时机器人开始运动,如果EM通过了测量切口的最低点,则已达到零点位置,机器人会自动停止,数值被控制系统储存,单轴零点校准完成。
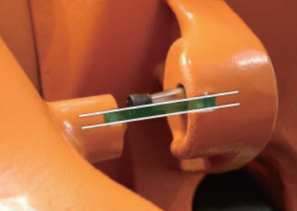
图5 预零点标定位置

图6 安装EMD
(2)软限位参数修改 依次完成A4~A6轴零点校准工作。各轴校准后,对机器A1轴软限位参数进行修改,具体操作步骤如下。
1)进入专家模式。
2)点击示教器主菜单→投入运行→售后服务→软件限位开关→修改软限位,如图7所示。也可以进入文件R1-Mada-Machine,在文本中进行修改。
3)根据现场应用情况,将原来的A 1轴软限位参数±185°修改至±40°(见图8),避免再次出现碰撞情况。
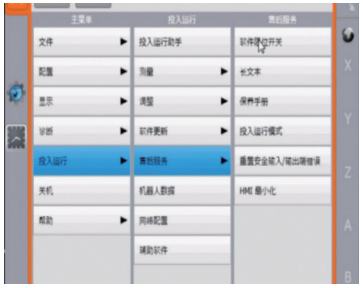
图7 修改软限位界面

图8 轴软限位参数修改
4KUKA机器人安全报警故障
一台KUKA机器人因长期未使用,开机后示教器出现初始化错误及安全模块故障报警,如图9所示。
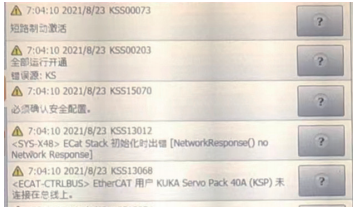
图9 初始化错误报警
针对故障,采取如下处理方法。
1)由于提示的是安全类报警,所以初步怀疑与外部安全信号异常有关。此时可以通过进入“投入运行”模式,判断机器人外部安全线路是否存在问题。在投入运行模式下KUKA机器人可以在不连接外部回路或开关的情况下移动机器人。
2)通过在示教器主菜单中选择投入运行→售后服务→投入运行模式,进入“投入运行”模式后机器人报警依然存在,确定故障来源于机器人自身控制系统,与外部安全回路无关。
3)通过报警提示,查找在CCU板(见图10)上的SYS-X48接口。观察CCU板状态灯发现异常,判断CCU板损坏,更换CCU板备件后机器人设备恢复正常使用。
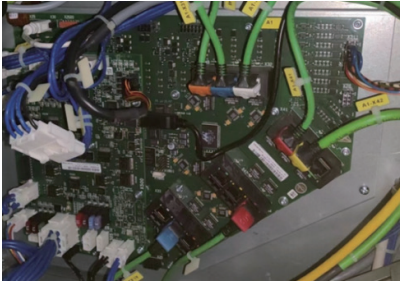
图10 KUKA C4控制柜CCU板
5结束语
目前来说,机器人在投入正常运行后故障率较低,但作为维护人员仍需要做好机器人的周期保养工作,按照机器人维保要求定期更换齿轮箱油液、蓄电池,检测带张紧力,以及定期进行系统备份等工作,以保证机器人良好的运行状态。
审核编辑 :李倩
-
计数器
+关注
关注
32文章
2123浏览量
92985 -
智能化
+关注
关注
15文章
4443浏览量
54103 -
工业机器人
+关注
关注
90文章
3263浏览量
91893
原文标题:实用!工业机器人常见问故障分析与处理
文章出处:【微信号:indRobot,微信公众号:工业机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
LabVIEW的六轴工业机器人运动控制系统
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
EPR6-S工业机器人通过EtherCAT转profinet网关接入西门子系统
ai人工智能机器人
工业机器人故障诊断与维护方法有哪些?

焊接机器人常见故障原因及解决措施






 工商网监
工商网监
评论