 机器人关节用什么电机,机器人关节电机可分为哪几种
机器人关节用什么电机,机器人关节电机可分为哪几种
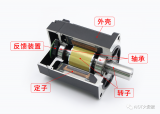
机器人关节是机器人各个零部件之间发生相对运动的机构。关节之中,单独驱动的为主动关节,反之称为从动关节。机器人关节模组通常采用超声波电机、伺服电机、谐波减速器、VR减速器、行星齿轮箱电机等。
机器人关节电机大致可细分为以下几种
1.交流伺服电动机:包括同步型交流伺服电动机及反应式步进电动机等。
2.微型电动机:包括超声波电机
3.直流伺服电动机:包括小惯量永磁直流伺服电动机、印制绕组直流伺服电动机、大惯量永磁直流伺服电动机、空心杯电枢直流伺服电动机。
4.步进电动机:包括永磁感应步进电动机。
fqj
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
206文章
27058浏览量
201444 -
电机
+关注
关注
139文章
8317浏览量
142156
发布评论请先 登录
相关推荐

无框电机最适合哪种应用?为什么机器人关节要用无框力矩电机?
机器人关节要求电机体积小、扭矩大、响应快。而无框力矩电机仅由转子和定子组成,体积小,同时具有较高的功率,低转速情况下能够输出更大扭矩,更符合人形机器
发表于 01-02 13:41
•813次阅读
LabVIEW的六轴工业机器人运动控制系统
。
系统研究与算法开发:首先,项目围绕机器人的数学模型,特别是空间位姿描述和D-H模型展开研究。在此基础上,开发了机器人的运动学正反解算法,使用了雅克比-迭代法等先进技术。此外,还涉及了机器人任务空间和
发表于 12-21 20:03
让机器人实现开发自由,探索精密工艺的机器人关节模组
机器人关节是作为机器人各个部件之间相互连接的节点,提供了必要的运动自由度。关节模组用其精确度和可靠性,确保了机器人在各个领域的高效率和高质量

机器人关节Joint描述
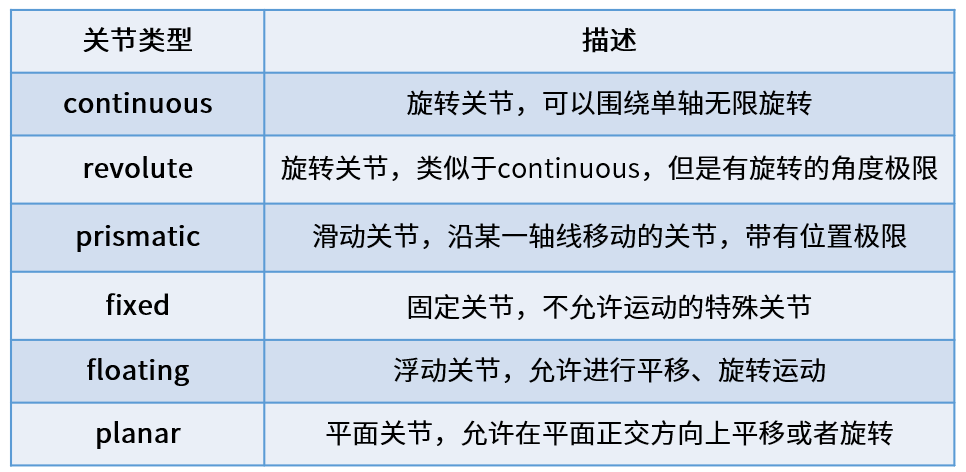
机器人模型中的刚体最终要通过关节joint连接之后,才能产生相对运动。 URDF中的关节有六种运动类型。 continuous,描述旋转运动,可以围绕某一个轴无限旋转,比如小车的轮子,就属于这种
剑指人形机器人赛道,泰科机器人推出重磅关节模组
泰科机器人几年前就研判人形机器人赛道将会成为热点,决定研发人形机器人适用的关节模组,经过艰苦的技术攻坚,泰科机器人推出了一系列适用于仿生

焊接机器人坐标系有哪几种
焊接机器人常用的四种坐标系:关节坐标系、直角坐标系、工具坐标系和用户坐标系。 关节坐标系: 关节坐标系是焊接机器人中最基本的坐标系之

机器人关节电机控制:精密、智能和协调的控制系统
机器人技术的迅猛发展已经在多个领域引起了革命性的变革,从制造业到医疗保健,再到日常生活。在机器人的运动控制中,伺服电机扮演着关键的角色,它们为机器人的

焊接机器人(直坐标机器人和关节臂机器人)的传感器都有哪几种?
焊接机器人的传感器都有哪几种?在自动化焊接领域中,传感器起到了比较重要的作用,焊接机器人配备了多个传感器,可以在焊接过程中实时监测,传感器提供了必要的焊接信息,控制系统以及操作人员可以根据信息正确

人形机器人电机用途
一,伺服电机概览 电机一般指电动机,也称马达,是机械设备的动力源,其作用是将电能转化为机械能,产生驱动力矩。 电机按用途可分为动力电机、

如何快速地让机器人投入生产
机器人也是一种设备,它主要内容是完成一个制造的其中一个功能。
制造一个产品,可以分为几个部件。和装配几个部件。
一个部件,可以是一个模具。或者由机器人完成组成一个模具。
机器人主要完成
发表于 06-06 16:18
浅谈儿童陪护机器人
儿童陪护机器人越来越受到人们的关注,其中转动控制是其重要组成部分之一。步进电机芯片作为一种常用的控制芯片,被广泛应用于儿童陪护机器人中的转动控制。本文将从步进电机芯片的工作原理、优势和
发表于 05-11 15:12





 工商网监
工商网监
评论