 浅谈超声电机在机器人手指关节中的应用分析
浅谈超声电机在机器人手指关节中的应用分析
机器人手指一直以来都是国际公认的高难度科技项目,随着科技水平的不断进步和新兴的交叉学科不断涌现,传统的电磁电机机器人手指由于灵活性差、感知能力低下、力的控制精度不高等,已无法满足应用的迫切需要。超声电机体积小、扭力大、抗干干扰,配合上闭环控制驱动电源控制,可应用于高精度机器人手指产品。
目前国际上常见:拉钢线、舵机、无刷电机加蜗轮蜗杆结构、步进电机加蜗轮蜗杆结构、气动方案作为机器人手指方案,这些方案普遍存在噪音、精度不准、体积大、堵转烧机、断电失效等情况。超声电机作为核心驱动部件作为机器人手指关节部件,可以做到静音、高精度、体积小、堵转不烧机、断电自锁等功能。
超声电机作为核心驱动部件作为机器人手指,可使得机器人手指外观及性能更趋于完美。机器人手指主要有3个大部分组成:微型超声电机手指结构、微型超声电机驱动电源及运动算法、微型闭环控制管理。
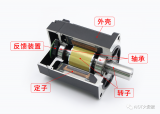
微型超声电机手指结构:以人的手指同比例进行机器人手指结构设计,将特种微型超声电机安装在特定的狭小空间,可以是中间出轴结构带齿轮,也可以中空直接驱动的结构。根据实际需求进行设置
微型超声电机驱动电源:应用于机器人手指特种微型超声电机的驱动电源体积要求尽可能小,以便于安装在极为狭小的空间,输入电压为安全电压,电源之间不要有干扰。在项目推展的未来,将会将驱动电源分为控制电源模块及功率模块进行集成电路开发,以便于在微小的空间安装多个驱动电源。
微型闭环控制管理:机器人手指微型闭环控制超声电机管理系统,驱动控制运算能力需求强,使用高于15位绝对编码器,实现精准的运动控制,使用传感器以及机器人手指运动算法实现精细化高精度的运动控制。
关键技术:
1、微型超声电机,将目前的行波型盘式超声电机进行体积整合,制作成一个体积,长度14mm*直径14mm、扭矩大于0.3Ncm、静音、堵转不烧机的指关节。
2、微型超声电机伺服驱动控制电源,将目前的行波型盘式超声电机伺服驱动控制电源进行微型化设计,制成L:15mm*W:15mm*T:8mm的多接口控制电源。
fqj
-
机器人
+关注
关注
206文章
27033浏览量
201392 -
超声波
+关注
关注
63文章
2808浏览量
136707
发布评论请先 登录
相关推荐
无框电机最适合哪种应用?为什么机器人关节要用无框力矩电机?
让机器人实现开发自由,探索精密工艺的机器人关节模组
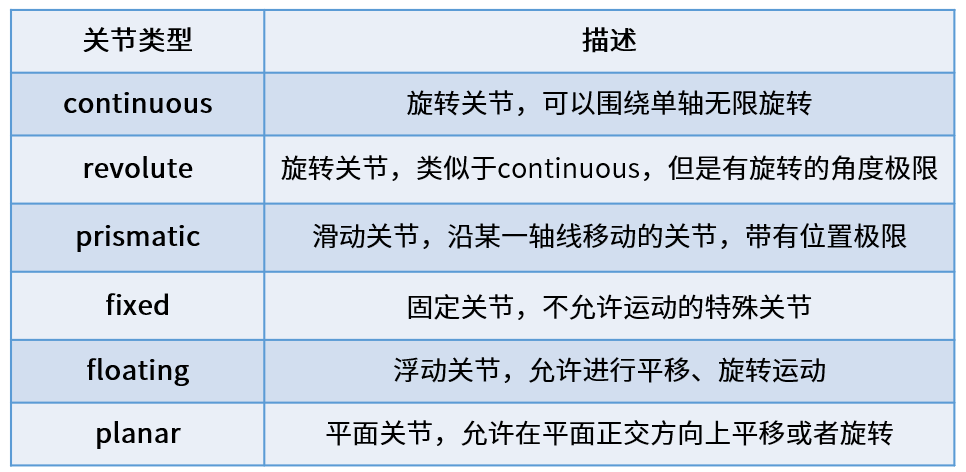
机器人关节Joint描述
剑指人形机器人赛道,泰科机器人推出重磅关节模组

机器人关节国产MCU AT32F403 DRV8313磁编码BLDC FOC直流无刷电机说明


机器人关节电机控制:精密、智能和协调的控制系统


泰科智能MJX系列关节模组助力机器人弹钢琴

用于Arduino Due的DIY Braccio机器人手臂护罩






 工商网监
工商网监
评论