好的,激光雷达(LiDAR)的核心功能是测量距离,其测距算法主要基于以下几种原理:
1. 飞行时间法 (Time-of-Flight, ToF) - 最主流方法
- 原理: 这是最常用和最直观的方法。通过精确测量激光脉冲从发射到被目标反射后再返回到接收器所需的时间
t,利用光速c(约每秒 30 万公里)来计算距离d。 - 公式:
d = (c * t) / 2(除以 2 是因为光走了来回两倍的距离)。 - 关键挑战:
- 时间测量精度: 因为光速极快,1 纳秒(10^-9 秒)的时间误差就会带来约 15 厘米的距离误差。要实现厘米甚至毫米级精度,需要皮秒级(10^-12 秒)或更高精度的时间测量。
- 脉冲特性: 需要发射短而强的激光脉冲,并准确检测其前沿时刻(通常是主脉冲的前沿)和回波脉冲的前沿时刻。
- 环境噪声: 区分微弱的回波信号和环境光、背景辐射等噪声至关重要。
- 实现方式:
- 直接时间测量: 使用高性能计时电路,如时间数字转换器(TDC),精确记录发射和接收之间的时间差。
- 相关采样法: 对发射脉冲和接收回波进行高速采样并做互相关运算,找到最大相关点对应的时间差。
- 应用: 绝大多数自动驾驶汽车激光雷达、地形测绘雷达、机器人导航雷达等都采用ToF原理。可分为脉冲式ToF(发射一个脉冲测量一次时间)和连续波ToF(发射调制连续波,测量相位差间接推算时间)。
2. 相位差/相干测距法 (Phase-Shift / FMCW) - 逐渐发展的重要方法
- 原理: 发射一束频率经过调制的连续激光(最常见的是线性调频的调频连续波,FMCW)。发射出去的光波与被目标反射回来的光波会存在一个相位差。这个相位差与光波往返目标所需的时间差成正比。测量发射波和反射波之间的相位差
Δφ或频差,就可以计算出飞行时间t和距离d。 - 公式推导:
Δφ = 2π * f_mod * t(其中f_mod是调制信号的频率或调制的频偏)- 代入
t = 2d / c,得到d = (c * Δφ) / (4π * f_mod)
- 特点与优势:
- 信噪比高: 连续波比单脉冲能量高,且通过相干探测(将回波与本地振荡器光混合)能显著抑制背景噪声,极大提高信噪比。
- 精度高: 在调制频率和信噪比足够高时,相位测量精度可达毫米甚至微米级。
- 速度测量能力: FMCW能够通过多普勒效应(回波载波频率的微小偏移)同时高精度地测量目标相对于雷达的径向速度(速度分辨率很高)。
- 抗干扰能力强: 其他非相干光源(如太阳光、其他LiDAR)不易干扰相干接收。
- 关键挑战:
- 系统复杂性: 需要稳定的激光光源、精确的频率调制、复杂的相干光路设计和高速数据采集处理。
- 动态范围与多目标: 处理多个目标或近距离强反射体(如挡风玻璃雨刮器)时的信号分离问题更复杂(需计算二维傅里叶变换)。
- 应用: 在高精度测绘、工业测量、无人机避障以及对测速有高要求的自动驾驶场景(如高速公路上区分静止和慢速移动目标)中越来越受青睐。尤其适合需要厘米级精度和速度信息的应用。
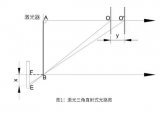
3. 三角测量法 (Triangulation) - 常用于近距离、低成本场景
- 原理: 类似于双目视觉。发射固定角度的激光束(点状或线状),激光光斑打在目标上,在另一个位置(与发射点形成固定基线距离
B)用感光器件(如CCD/CMOS线阵)接收光斑的位置。 - 计算方式: 目标距离
d改变时,接收器上光斑的位置x也会改变。利用简单的相似三角形几何关系即可计算出距离d。 - 公式:
d = (B * f) / (x * sin(θ))(简化示意公式,具体形式取决于光学设计,f为镜头焦距,θ为发射光束与基线的夹角)。 - 特点:
- 成本低: 无需高精度计时电路,感光器件相对便宜。
- 近距离精度高: 在近距离(几厘米到几十米)范围内精度相当不错。
- 视场有限: 通常是线扫式或点式,构建大视场需要复杂扫描或阵列。
- 测程受限: 距离越远,光斑偏移越小,测量精度和范围显著下降(信噪比低)。
- 应用: 消费级扫地机器人、避障传感器、工业自动化中短距离物料测距/定位、部分手持式三维扫描仪。
算法的重要共同组成部分
无论采用哪种基础原理,现代激光雷达的测距算法通常还包含以下处理步骤:
- 信号预处理:
- 滤波降噪(时域、频域滤波)。
- 放大(低噪声放大器)。
- 信号整形(对脉冲信号)。
- 回波检测与时间点提取 (ToF): 精确判定回波信号的开始时刻(如前沿检测、恒定阈值/可变阈值检测、恒比定时等)。对于FMCW,主要是做数字信号处理提取相位差/频率差信息。
- 距离计算: 根据基础公式和校准参数计算最终距离值。
- 多目标处理: 对于同一个接收窗口可能有多个不同距离目标的情况(例如穿透雨雾或植被),算法需要识别和分离多个回波峰值(ToF)或多个频谱峰值(FMCW)。
- 校准与补偿:
- 时间偏移校准: 校正激光发射时刻到计时电路开始计时之间的固定延时(ToF)。
- 内部光学路径差补偿: 校正发射和接收光路在雷达内部的固有路径差异。
- 环境参数补偿: 修正空气折射率随温度、湿度、压力的变化(影响光速c的值)。
- 镜头畸变校正: 校正接收镜头引入的光斑位置误差(三角法)。
- 姿态校正: 对于安装在移动平台(车、飞机)上的激光雷达,需要结合IMU/GNSS数据进行空间位置和姿态补偿。
- 点云生成: 将每个测量点的距离值、对应的扫描角度/位置信息、有时还有回波强度信息结合起来,生成三维空间中的点云数据。
总结
- ToF (脉冲或连续波): 是最主流的技术,依靠测量激光的飞行时间。速度快、测程长,系统相对复杂。
- FMCW (连续波): 利用调制连续波的相位/频率差,精度高、能测速、抗干扰强,是自动驾驶等场景的发展热点,但系统复杂度更高。
- 三角法: 基于简单几何原理,低成本,近距离精度好,但测程和视场受限,主要用于特定消费和工业领域。
选择哪种测距算法取决于具体应用需求(精度、测程、速度、成本、体积、功耗、是否需要测速等)。随着技术的发展,FMCW和ToF都在不断提升性能和降低成本。
TOF激光雷达
TOF 方案激光雷达是激光雷达新一代技术方案,本产品解决了如市场三角测试法等产品组装问题难,价格成本高等问题,目前提供面阵及单光子技术,基于COM产品。集成了SPAD,TDC,DSP,RAM
![]() PCB00025081
2019-06-07 00:03:35
PCB00025081
2019-06-07 00:03:35
由iphone12说说激光雷达 FMCW激光雷达 精选资料分享
iphone12这个亮点不在5G上面,毕竟国内的一些厂商早就已配备,也不在颜色,重点在于配备了一颗激光雷达!先说一下这个激光雷达带来的用途,最直接的就是能够快速精准对焦,即使在晚上也能够很好实现
![]() golabs
2021-07-22 09:12:51
golabs
2021-07-22 09:12:51
【北醒TFmini-S 测距/避障激光雷达传感器免费试用连载】基于北醒TFmini-S 测距/避障激光雷达传感器关键地区人员靠近防撞提醒装置
项目名称:基于北醒TFmini-S 测距/避障激光雷达传感器关键地区人员靠近防撞提醒装置试用计划:申请理由本人在嵌入式和电路领域有五年多的学习和开发经验,曾设计过北斗和GPS定位救生装置,对定位系统
![]() yaoan1000
2020-05-28 17:29:18
yaoan1000
2020-05-28 17:29:18
激光雷达、激光测距、脉冲测量必配芯片MS1003
激光雷达、激光测距、脉冲测量必配芯片MS1003产品简述MS1003是一款高精度时间测量(TDC)电路,对比MS1002具有更高的精度和更小的封装,适合于高精度小封装的应用领域。MS1003具有
![]() XBWIcSales
2021-01-24 21:02:44
XBWIcSales
2021-01-24 21:02:44
激光雷达知多少:从技术上讲讲未来前景
激光雷达是什么 激光雷达最早的定义是 LIDAR,英文为 Light Deteation and Ranging,中文意思是「光的探测和测距」。 其实更准确的一个定义是 LADAR:LAser
![]() wayaj
2020-07-14 07:56:45
wayaj
2020-07-14 07:56:45
【北醒TFmini-S 测距/避障激光雷达传感器免费试用连载】基于FPGA平台的YOLO-Complex点云数据加速
)/显示控制等内容。目前正在研究项目是基于FPGA ZCU102平台的点云算法开发(YOLO-Complex),希望借助北醒TFmini-S 测距/避障激光雷达传感器可以进行特定场景的点云数据采集,以供算法
![]() 卿小小_9e6
2020-05-28 17:32:37
卿小小_9e6
2020-05-28 17:32:37
激光雷达成为自动驾驶门槛,陶瓷基板岂能袖手旁观
认为是 L3 级及以上自动驾驶必备传感器。激光雷达兼具测距远、角度 分辨率优、受环境光照影响小的特点,且无需深度学习算法,可直接获得物体的距离和 方位信息。这些相较于其他传感器的优势,可显著提升自动驾驶
![]() slt123
2021-03-18 11:14:17
slt123
2021-03-18 11:14:17
毫米波雷达VS激光雷达VS超声波雷达
近年来,随着雷达技术的发展和普及,科技大片中的无人驾驶离我们越来越近。全球很多中高档汽车已经开始配备汽车雷达。目前用于汽车上的雷达分为超声波雷达、毫米波雷达、激光雷达等,不同的雷达工作原理不同,性能
![]() wo97306730
2019-09-19 09:05:02
wo97306730
2019-09-19 09:05:02
用于激光测距、激光雷达的高精度时间测量电路MS1003
模式,适合于激光雷达和激光测距。主要特点 双通道单精度模式 46ps 单通道双精度模式 23ps 非校准测量范围 3.5ns(0ns)至 16μs 校准测量范围 3.5ns(0ns)至
![]() 九里香
2021-07-15 19:40:49
九里香
2021-07-15 19:40:49
激光雷达的测距方法有哪些?
就像大家所熟知的那样,路程=速度×时间,激光雷达的测距过程也离不开这个公式。在空间中,激光的飞行速度是已知的3×108 m/s。现有的激光雷达测距方法有很多种,除了直接测量激光脉冲飞行时间的方式,还可以通过对发射激光信号的幅度、频率等参数进行调制来间接的获取目标的距离信息。
2020-09-02 16:56:29
剖析激光雷达测距能力测试原理

的三维信息,并且具有良好的指向性,抗干扰性强,测距精度高。 直接表现激光雷达系统测距性能的是其中系统级指标,测距能力反映在指标上表现为max测程与测距精度。保证系统的发射机指标与接收机指标为保证测距系统的性能提供了基础
2021-10-08 09:44:39
【北醒TFmini-S 测距/避障激光雷达传感器试用连载】——上位机测试
` 首先很荣幸能够拿到北醒TFmini-S测距激光雷达的试用资格。刚开始使用,只是简单的用上位机测试了一下,cm级的测试精度,测试效果非常不错。一、外观形状 收到快递发现是非常小的盒子,打开盒子后
![]() 照妖镜1111
2020-06-13 22:08:00
照妖镜1111
2020-06-13 22:08:00
激光雷达类型:TOF雷达与三角测距雷达
如今,激光雷达已被广泛应用于机器人、无人驾驶、AR/VR、3D打印等多个领域,根据应用领域的不同,激光雷达的类型也存在一定差异,机器人是目前激光雷达应用最为火热的领域之一,按照不同的技术路线,可将机器人激光雷达分为TOF激光雷达及三角测距激光雷达两大类型。
2020-12-26 09:27:15
阐述基于激光三角测距法的激光雷达原理

激光三角测距法作为低成本的激光雷达设计方案,可获得高精度、高性价比的应用效果,并成为室内服务机器人导航的首选方案,本文将对激光雷达核心组件进行介绍并重点阐述基于激光三角测距法的激光雷达原理。
2023-12-27 18:20:33
激光雷达是什么,激光雷达的应用说明
优势。随着科技的不断发展,激光雷达的应用越来越广泛,在机器人、无人驾驶、无人车等领域都能看到它的身影。 激光雷达现状-低成本和高稳定不可兼得? 相较于十分依赖算法、需要海量数据进行训练、受环境因素影响颇大的摄像头视觉和识别精
2022-06-20 16:53:41
一文解析激光雷达结构

激光雷达即激光探测及测距系统,是通过发射激光束来探测目标位置、速度等特征量的雷达系统。按扫描维度,激光雷达可分为一维激光雷达、二维激光雷达和三维激光雷达。
2023-05-10 09:58:33
最佳防护——激光雷达与安防监控解决方案
图2:安防激光雷达、摄像头、报警器多手段协同激光雷达+安防监控优势近年来,激光雷达技术飞速发展,从简单的激光测距技术,逐步发展出激光跟踪、激光测速、激光扫描成像、激光多普勒成像等技术。其工作环境也从
![]() ZGY15151515
2020-02-29 17:03:44
ZGY15151515
2020-02-29 17:03:44
【北醒TFmini-S 测距/避障激光雷达传感器免费试用连载】灭火弹测距
项目名称:灭火弹测距试用计划:1.申请理由:为了保证灭火效果,需要在一定距离上起爆灭火剂2.申请计划:设计灭火控制器,预留串口接口在灭火弹上装激光雷达传感器,在4-8m上空播撒灭火剂评估测距精度,近炸效果在可能的情况下对不同速度下的雷达测距进行试验
![]() 梁嘉琪
2020-05-28 17:31:48
梁嘉琪
2020-05-28 17:31:48
基于激光三角测距法的激光雷达原理
目前激光雷达的测量原理主要有脉冲法、相干法和三角法3种,脉冲法和相干光法对激光雷达的硬件要求高,但测量精度比激光三角法要高得多,故多用于军事领域。而激光三角测距法因其成本低,精度满足大部分商用及民用要求,故得到了广泛关注。
2023-12-25 10:04:56
如何使用BLDC电机助力机械扫描激光雷达实现360度视场
我们都知道驾驶汽车时看清路面至关重要。而在实施自动驾驶等技术时,对这点要求得更为严格。自动驾驶汽车的“眼睛”被称为光检测和测距(激光雷达)技术,可提供汽车周围环境的精确图像。激光雷达使用光源和传感器
![]() 吴与伦比
2022-11-03 07:12:38
吴与伦比
2022-11-03 07:12:38
当“思岚”激光雷达邂逅盲人拐杖
的形状和周围环境,结合SLAM算法和视觉传感器,进行SLAM避障与导航。图源:Science Robotics障碍物规避A1激光雷达通过不断的旋转,发射激光出去,接受激光返回,算出障碍物距离当前的距离
![]() slamtec
2021-11-12 14:12:43
slamtec
2021-11-12 14:12:43
高速ADC关系到激光雷达测距精度
而对于自动驾驶激光雷达而言,测距距离足够远、测距精度足够高,是保证自动驾驶系统及时作出判断的前置条件。前面也提到测距距离取决于激光器的功率,而测距精度,则取决于ADC的采样频率。
2022-09-06 09:07:56
多线激光雷达和单线激光雷达区别

。是一家能提供单点、单线到多线全系列、dtof、itof全品类激光雷达方案定制化的公司,而且掌握了机器人移动底盘技术。在激光雷达核心硬件、专用芯片、AI算法上具有完整的自主知识产权。
2022-02-10 18:36:41
激光雷达点云数据分割算法的嵌入式平台上的部署实现
点击上方“AI算法修炼营”,选择“星标”公众号精选作品,第一时间送达这篇文章是激光雷达点云数据分割算法的嵌入式平台上的部署实现。主要的创新点有两点:一是利用多路分支采用不同分辨率输入后再...
![]() 哥儿
2021-12-21 08:28:22
哥儿
2021-12-21 08:28:22
北醒正式发布其激光雷达测距模组已用于乘用车量产项目
”激光雷达进入前装车厂,是大多数激光雷达公司的目标。但是,路径有很多种。北醒选择先让激光雷达的测距模组登陆汽车前装市场。让产品在大规模量产中反复打磨,再促进包含测角功能的3D激光雷达整体的成熟
2020-10-09 15:27:06
 工商网监
工商网监


