好的!位置观测器(Position Observer) 是一种应用于运动控制系统(如电机控制、机器人、航空航天等)中的算法或软件模块。
以下是它的核心概念和作用解释:
-
核心目的:
- 估计/推算旋转电机(如永磁同步电机PMSM、无刷直流电机BLDC)转子(旋转部分)的精确位置角度。
- 或者,估计直线运动负载的线性位置。
-
为什么需要它?(传感器不足或受限时)
- 无传感器应用: 最核心的应用场景。当系统没有安装直接的物理位置传感器(如旋转变压器Resolver、光学编码器Encoder)时,观测器通过测量其他容易获取的信号(通常是电机相电流和母线电压)来实时计算转子的位置。
- 成本/复杂度降低: 省去了位置传感器及其布线,降低了成本和系统复杂性,提高了可靠性(减少故障点)。
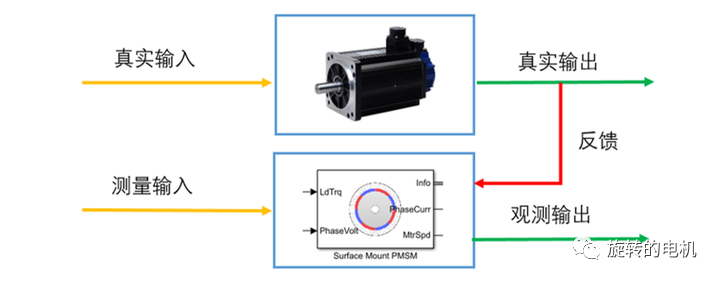
- 传感器辅助/容错: 即使系统配备了物理传感器,位置观测器也可以:
- 冗余/验证: 提供独立的位置估计,与传感器信号交叉验证,提高系统安全性。
- 故障恢复: 在物理传感器发生故障时,观测器可以作为备份,维持系统基本运行(可能性能下降)。
- 信号降噪/融合: 对原始传感器信号进行滤波和融合,得到更平滑、更准确的位置信息。
- 提高低速性能: 在某些算法(如基于反电动势的观测器)中,能改善电机在极低转速下的位置检测能力(物理传感器在接近零速时分辨率可能不足)。
-
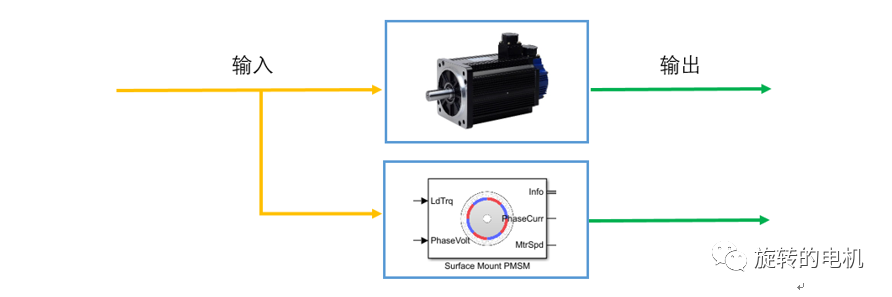
基本原理:
- 位置观测器是一个数学模型,通常基于电机的物理方程(电磁方程、运动方程)。
- 它实时采集输入信号:
- 必备输入: 电机相电流
Ia, Ib, Ic(或变换后的Id, Iq)和/或直流母线电压Vdc。 - 可选输入(若有): 估计的转速、指令电压、温度等。
- 可能输入: 物理传感器信号(用于融合或验证)。
- 必备输入: 电机相电流
- 运行核心算法: 根据这些输入信号和电机模型,利用状态估计理论(如 Luenberger观测器、扩展卡尔曼滤波 EKF、滑模观测器 SMO、模型参考自适应系统 MRAS 等)进行计算。
- 输出结果: 实时估算出的转子电角度
θ_e(电气角度),通常也会同时估算出转子机械转速ω_m。
-
关键输出:
θ_e(转子电角度): 这是矢量控制(FOC)中最关键的变量之一,用于:- 坐标变换 (
Clark/Park变换):将三相电流变换到与转子磁场同步旋转的dq坐标系。 - 磁场定向:使控制器能精确地控制产生转矩的电流分量(
Iq)和产生磁场的电流分量(Id)。
- 坐标变换 (
ω_m(转子机械转速): 用于速度闭环控制。
-
典型应用场景:
- ⚡ 无编码器永磁同步电机驱动(空调压缩机、风扇、水泵、电动车驱动等)。
- ? 低成本/对可靠性要求高的机器人关节。
- ? 电动汽车牵引电机的启动/备用控制。
- ? 航空航天作动系统(减少电缆和传感器)。
- ? 高可靠性工业驱动(带传感器验证和容错功能)。
简单比喻: 想象你在一辆没有里程表和GPS的汽车里闭眼开车。你可以通过感受发动机的声音、震动、方向盘转动角度和身体感觉,结合你对汽车加速/减速特性的了解(你的“内部模型”),来大致估算你开了多远、速度多少以及转向了哪里。位置观测器就是电机控制系统中完成类似推算工作的“智能软件模块”。
总结来说:位置观测器是电机控制系统中,利用可测量的电信号(电流、电压),结合电机数学模型和先进估计算法,实时计算出难以直接测量的关键状态(转子位置角度和转速)的智能模块。它使得高性能的无传感器控制或更鲁棒的有传感器控制成为可能。
【资料分享】Simulink永磁同步电机控制仿真系列六:使用电压电流模型的位置估计
、理论与现实的差异2.2 、仿真验证而已2.3 、误差校正3、转子位置观测器3.1、搭建一个真正的观测器3.2、看看效果引言上一篇文章中提到了使用滑膜观测器通过估计反电动势实现转子位置解算,本质上
![]() felixbury
2021-06-29 07:10:38
felixbury
2021-06-29 07:10:38
利用GD32F130系列MCU设计冰箱压缩机变频板方案的介绍和应用分析
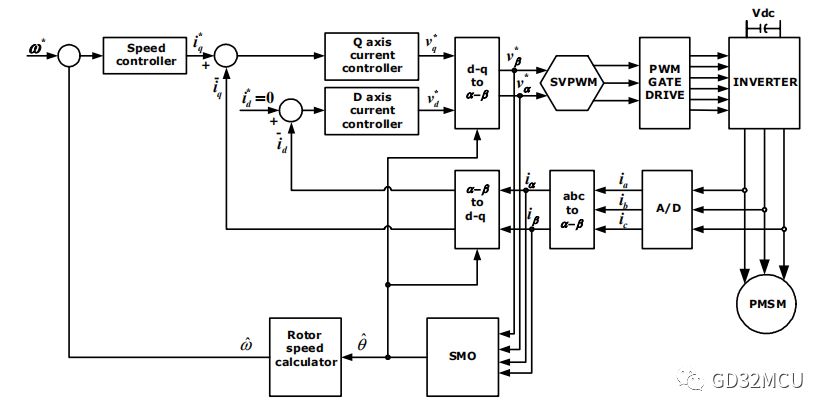
GD32F130系列MCU可以轻松实现上述的SVPWM产生器,Park/Clark变换,PI控制器,以及转子位置观测器。MCU内置的高速高精度SAR ADC和多级中断系统可以确保闭环控制的实时性。
2019-10-21 15:13:33
无感FOC滑模观测器运行位置检测方法
检测电机运行过程中的转子位置检测技术可分为适用于中高速时观测反电动势的转子位置观测器,和适用于低速或零速时跟踪凸极性的高频信号注入法。两种方法各有千秋,值得说明的是,观测反电动势的方法在低速或零速
![]() 大洼球王
2022-10-12 15:23:20
大洼球王
2022-10-12 15:23:20
基于电流误差和PLL估算的无感FOC算法MATLAB代码生成技术直播资料
直播内容: 针对无感FOC位置观测器如下亮点: 1.无速度闭环启动 重载或者额定负载启动 启动平滑无抖动 可高速运行3000hz也能正常工作 耐电机高低温(-35度-130度)电机正常工作 低速
![]() ElecFans小喇叭
2023-06-14 11:36:04
ElecFans小喇叭
2023-06-14 11:36:04
手把手教你MATLAB,Sumlink电机控制代码生成,内容表贴电机凸极电机无感FOC重载启动。系列课程免费直播在线互动。
稳定性能。可以一键生成代码。 这是算法结构内部框图, CLARK变换,PARK变换,INVPARK,七段式SVPWM,无感位置观测器,可以一键生成代码 无感FOC算法又本文章编写而来,某川科技就按
![]() jf_81570321
2023-05-26 14:00:49
jf_81570321
2023-05-26 14:00:49
【直播精选】手把手教你无感FOC电机控制,MATLAB代码生成
直播简介 针对无感FOC位置观测器如下直播亮点: 1.无速度闭环启动 2.重载或者额定负载启动 3.启动平滑无抖动 4.可高速运行3000hz也能正常工作 5.耐电机高低温(-35度-130度)电机
2023-06-07 12:00:01
传统滑模观测器的设计
2.2传统滑模观测器的仿真结果总结前言本博客传统滑模观测器的设计,是在矢量控制策略的基础上,通过运用滑模变结构理论对反电势进行估计,进而提取电机的转子信号和转速信息。 永磁同步电机的无感控制是通过检测电机绕组中的有关电信号,采用一定的控制算法进而实现转子位置及速度估算。这无疑会大大降低电机控制的成本,
![]() winber
2021-08-27 08:07:21
winber
2021-08-27 08:07:21
负载转矩观测器的设计与仿真
负载转矩观测器的设计与仿真实现假定负载转矩在永磁同步电机控制系统中被认作外部负载扰动,负载是不可测的,但是可观的。从而,依据PMSM数学模型(1)中进行负载转矩观测器的设计,具体如下:1.1负载转矩
![]() 国名英雄XXX
2021-09-15 07:56:33
国名英雄XXX
2021-09-15 07:56:33
【精选直播】无感FOC控制中滑模观测器估算转子角度思路分享

直播预告扫码购买课程&预约直播直播亮点1、FOC无感控制框图分析2、电机数学模型回顾3、转子位置角求取思路4、滑模观测器思路分享5、滑模观测器的实现直播大纲1、无感FOC控制框图分析2、电机
2025-08-05 08:06:49

基于PMSM电流模型的滑模观测器设计
对于观测器的设计,一般会选取一个数学模型进行参照。而对于PMSM而言,一般会根据电机的电压模型或者电流模型来设计观测器。由于电机的负载状态会影响扩展反电动势的大小,而电机在高速重载的情况下,定子电流将会有较大的变化。因此,对于估算扩展反电动势的滑模观测器,按照PMSM的电流模型来设计会更合理。
![]() h1654155216.9102
2021-08-27 06:52:55
h1654155216.9102
2021-08-27 06:52:55
基于滑膜观测器SMO的无感控制+Matlab/Simulink仿真详解
本章节采用滑膜观测器SMO进行永磁同步电机的无感控制,首先介绍了状态观测器的原理,然后分析了滑膜观测器的原理设计了传统低阶滑膜观测器,并针对传统滑膜观测器存在“抖振”的问题
2023-06-08 15:03:00
磁链观测器在异步电机矢量控制中的应用
导读:本期文章主要是介绍电压型磁链观测器和电流型磁链观测器。两种磁链观测器运用到异步电机矢量控制中,外环磁链环用磁链观测器形成闭环,分析电压型和电流型磁链观测器的观测性能。
2022-09-06 10:35:37
基于滑膜观测器的永磁同步电机无感控制
本章节采用滑膜观测器SMO进行永磁同步电机的无感控制,首先介绍了状态观测器的原理,然后分析了滑膜观测器的原理设计了传统低阶滑膜观测器,并针对传统滑膜观测器存在“抖振”的问题,对建立的传统滑膜观测器
2023-05-24 11:36:49
基于龙伯格观测器Luenberger的无感控制+Matlab/Simulink仿真
本章节采用龙伯格观测器进行永磁同步电机的无传感器控制,首先分析了龙伯格观测器的原理,然后设计了PMSM的全阶龙伯格观测器,最后通过Matlab/Simulink对该观测器方案进行仿真分析,为了进行
2023-06-08 14:46:03
永磁同步电机无速度传感器控制(一)——滑模观测器(三)精选资料分享
反电动势是无法得到准确的实际位置信号的。其原因是:滑模观测器时刻在滑模面上下抖振,输出的扩展反电动势包含不连续的高频切换信号,直接求取结果抖振严重因此,为了提取连续的扩展反电动势估计值,通常需要外加一个低通滤波器(低通滤波器的原理我有篇基础补充博客详细说明了,请大家查阅),滤除高频切换信号。如下所示:
![]() LANxs
2021-07-13 08:40:34
LANxs
2021-07-13 08:40:34
异步电机混合模型转子磁链观测器学习
导读:本期文章主要介绍混合模型转子磁链观测器,其利用电流型磁链观测器在低速区域的观测优势和电压型磁链观测器在中、高速区域的观测优势实现在全速范围内较为准确的估算转子磁链。
2022-11-21 10:16:03
有 常!!!私聊我,求开关磁阻电机的无位置控制搭建的matlab模型,最好是基于滑模观测器,其他可以商量,急!!
最好是基于滑模观测器,其他可以商量
![]() Mrsixer
2020-11-28 21:18:29
Mrsixer
2020-11-28 21:18:29
一种基于滑模观测器的电流偏差解耦控制方法
的问题,该文提出一种基于滑模观测器的电流偏差解耦控制方法。通过计算偏差解耦控制电流的耦合项,发现相对于传统电压前馈解耦,偏差解耦的耦合项简单且易于控制,解决了传统电压前馈解耦控制解耦效果不理想的问题。通过电流滑模观测器的跟踪特性,将定子电流的估计值作为状态变量,反馈到系统输入端,...
![]() 我有一车切糕
2021-08-27 06:41:40
我有一车切糕
2021-08-27 06:41:40
永磁同步电机滑模观测器仿真结果波形的简要分析
1、滑模仿真框图2、仿真结果波形的简要分析1、转速响应曲线 下图为滑模无位置控制的转速响应,其中蓝色为估计转速,内部被遮盖的为实际转速,可以从图中看出,估计转速和实际转速基本重合,验证了滑模观测器
![]() 哔哔哔-
2021-08-27 06:47:54
哔哔哔-
2021-08-27 06:47:54


永磁同步电机的转子位置估计方法
引言应用于永磁同步电机的转子位置估计方法有多种,常用观测电机反电动势或观测电机磁链的方式估计转子位置,针对不同的观测状态量又有多种不同的观测方法。以下使用滑模观测器观测电机反电动势,进而估计永磁
![]() 冰箱洗衣机
2021-08-27 08:16:21
冰箱洗衣机
2021-08-27 08:16:21
PMSM是如何获得电机准确的转子位置及转速信息的?
滑模观测器算法的原理是什么?如何对滑模观测器算法进行分析和建模?PMSM是如何获得电机准确的转子位置及转速信息的?
![]() kgfhdfgx
2021-07-29 07:03:57
kgfhdfgx
2021-07-29 07:03:57
MATLAB仿真永磁同步电机无位置传感器控制系统的研究与设计
本文小结一下,电机无位置控制中的一种--滑模观测器的设计,还有自适应观测器的设计等其他内容,等有时间之后再来总结。现代永磁同步电机控制原理及MATLAB仿真永磁同步电机无位置传感器控制系统的研究
![]() 那年我十七_
2021-08-30 06:33:08
那年我十七_
2021-08-30 06:33:08
 工商网监
工商网监


