 电子发烧友App
电子发烧友App












 创作
创作 发文章
发文章 发帖
发帖  提问
提问  发资料
发资料 发视频
发视频资料介绍
描述
Raspberry Pi 零 Dynamixel 帽子
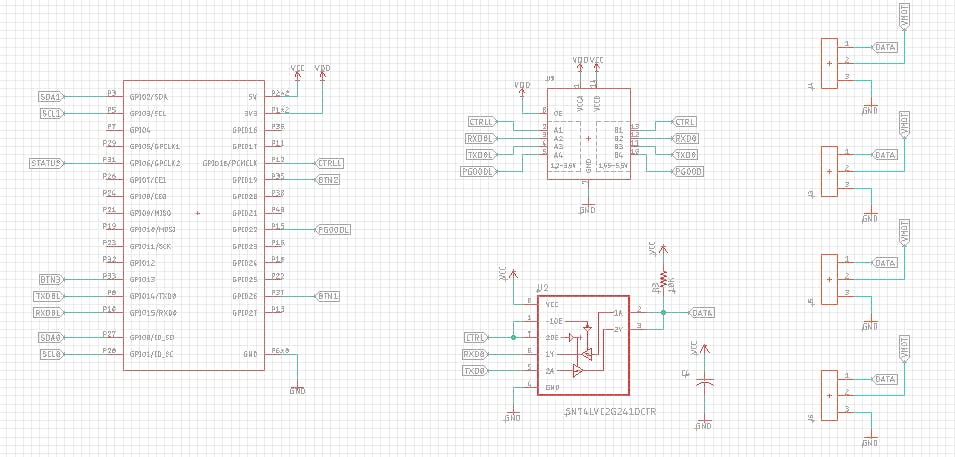
Dynamixel Hat 是一块板卡,能够通过使用连接到 3 针 Molex 连接器的 74LS241 三态缓冲器将树莓派(串行)与 Dynamixel 伺服系统进行通信。
Raspberry Dynamixel 帽子接口
该板包含一个 TI TPS62143 稳压器,可降低电压以启动 Raspberry Pi Zero,可以通过板载滑动开关打开或关闭电源。TPS62143 是一款同步降压 DC-DC 转换器,针对高功率密度应用进行了优化。
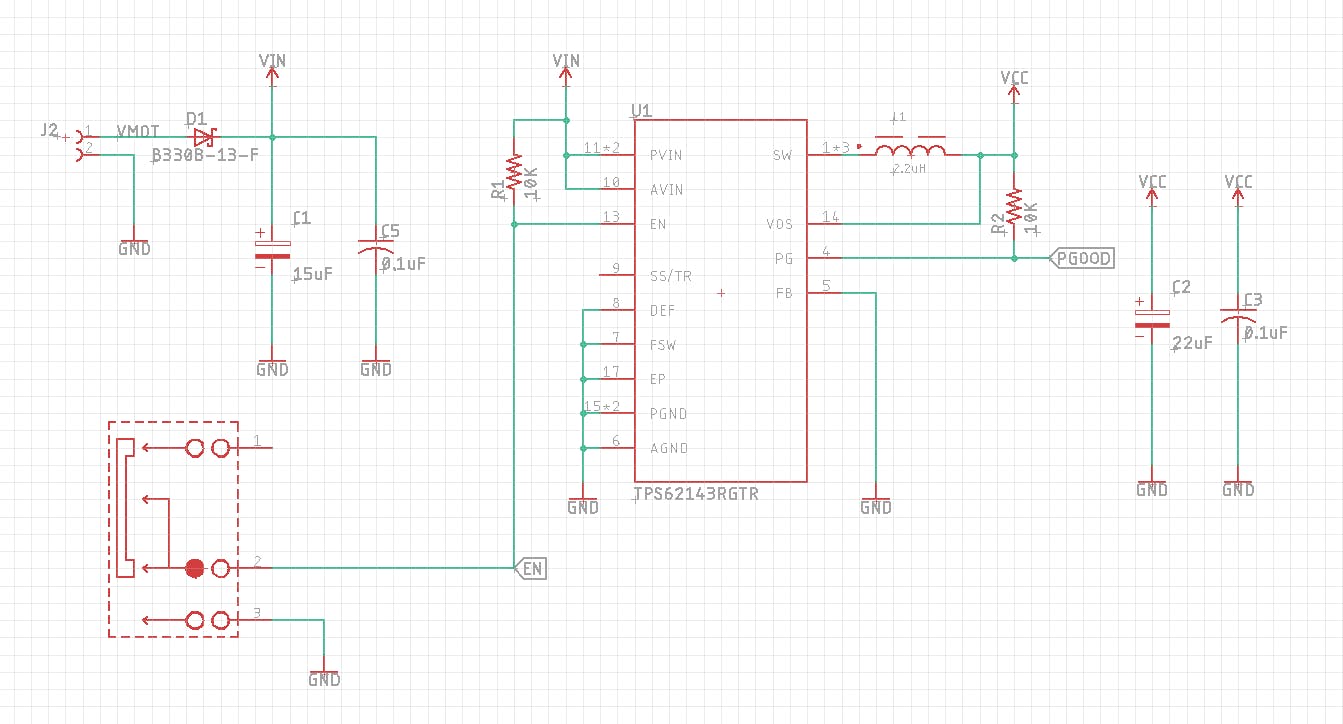
TI TPS62143 DC-DC 转换器
该板接受 2S 和 3S Lipo 电池,DC-DC 转换器接受高达 17 V,但电机推荐电压为 11.1V (3S Lipo),因为 MAX 输入电压约为 16 V。
这些板包含两个 I2C 端口,用于您的机器人项目的传感器。这些 JST 1 mm 间距和 4 针连接器与 QWIIC 系列中的许多板兼容。
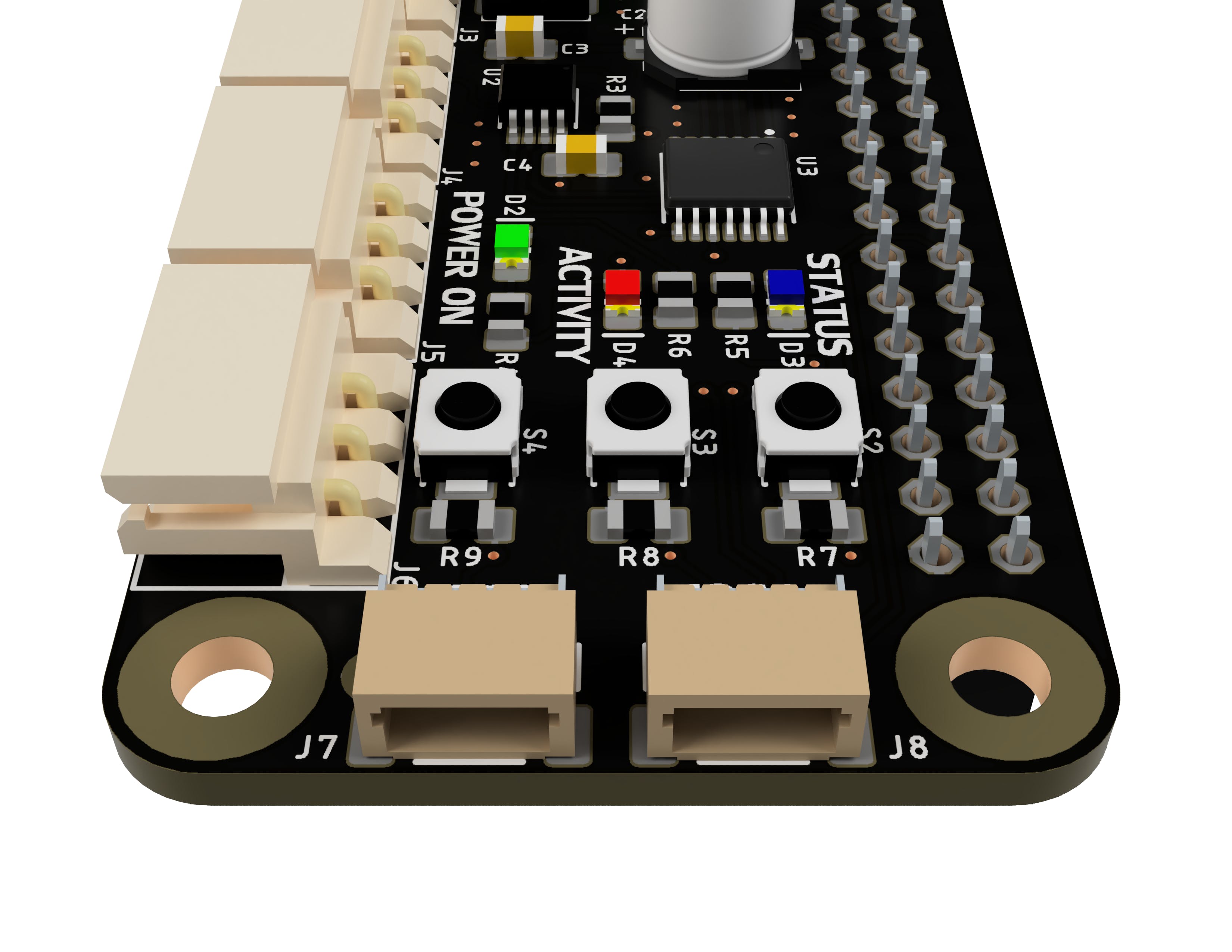
用户 LED 按钮和 I2C 端口
还有 3 个 LED 和 3 个按钮用于通知和与电子设备交互,这些按钮可通过 Raspberry GPIO 进行编程,1 个 LED 也可配置 GPIO,另外 2 个 LED 是活动和开机通知。
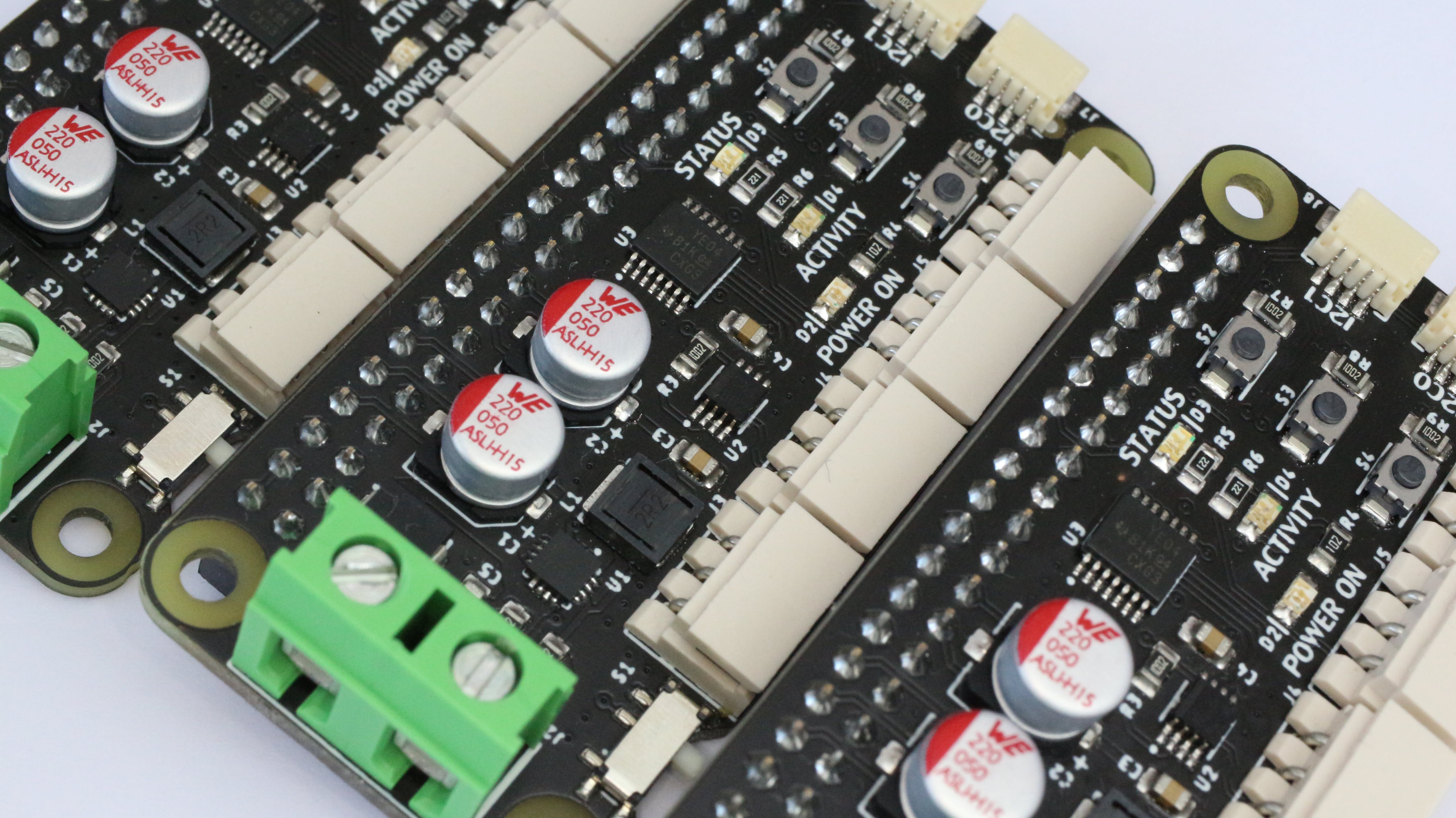
第一个 Dynamixel 帽子第一批
装配视频
引脚排列

Dynamixel 帽子引脚分配
测试代码(Python):
import RPi.GPIO as GPIO
import serial
import time
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BCM)
GPIO.setup(18,GPIO.OUT) # Control Data Direction Pin
GPIO.setup(6,GPIO.OUT) # Blue LED Pin
GPIO.setup(26,GPIO.IN) # S2 Push Button Pin
GPIO.setup(19,GPIO.IN) # S3 Push Button Pin
GPIO.setup(13,GPIO.IN) # S4 Push Button Pin
Dynamixel=serial.Serial("/dev/ttyS0",baudrate=1000000,timeout=0.1, bytesize=8) # UART in ttyS0 @ 1Mbps
while True:
if GPIO.input(26):
GPIO.output(6,GPIO.LOW)
else:
GPIO.output(6,GPIO.HIGH)
GPIO.output(18,GPIO.HIGH)
Dynamixel.write(bytearray.fromhex("FF FF 01 05 03 1E CD 00 0B")) # Move Servo with ID = 1 to position 205
GPIO.output(18,GPIO.LOW)
startDynamixel = Dynamixel.read()
startDynamixel = Dynamixel.read()
idDynamixel = Dynamixel.read()
lenghtDynamixel = Dynamixel.read()
errorDynamixel = Dynamixel.read()
chkDynamixel = Dynamixel.read()
print("Servo ID = " , int.from_bytes(idDynamixel,byteorder='big') , " Errors = ", int.from_bytes(errorDynamixel,byteorder='big'))
time.sleep(1)
if GPIO.input(19):
GPIO.output(6,GPIO.LOW)
else:
GPIO.output(6,GPIO.HIGH)
GPIO.output(18,GPIO.HIGH)
Dynamixel.write(bytearray.fromhex("FF FF 01 04 02 2A 01 CD")) # Read Voltage of Servo with ID = 1
GPIO.output(18,GPIO.LOW)
startDynamixel = Dynamixel.read()
startDynamixel = Dynamixel.read()
idDynamixel = Dynamixel.read()
lenghtDynamixel = Dynamixel.read()
errorDynamixel = Dynamixel.read()
voltDynamixel = Dynamixel.read()
chkDynamixel = Dynamixel.read()
print("Servo Voltage = " , int.from_bytes(voltDynamixel,byteorder='big'))
GPIO.output(18,GPIO.HIGH)
Dynamixel.write(bytearray.fromhex("FF FF 01 04 02 2B 01 CC")) # Read Temperature of Servo with ID = 1
GPIO.output(18,GPIO.LOW)
startDynamixel = Dynamixel.read()
startDynamixel = Dynamixel.read()
idDynamixel = Dynamixel.read()
lenghtDynamixel = Dynamixel.read()
errorDynamixel = Dynamixel.read()
tempDynamixel = Dynamixel.read()
chkDynamixel = Dynamixel.read()
print("Servo Temperature = " , int.from_bytes(tempDynamixel,byteorder='big'))
GPIO.output(18,GPIO.HIGH)
Dynamixel.write(bytearray.fromhex("FF FF 01 04 02 24 02 D2")) # Read Position of Servo with ID = 1
GPIO.output(18,GPIO.LOW)
startDynamixel = Dynamixel.read()
startDynamixel = Dynamixel.read()
idDynamixel = Dynamixel.read()
lenghtDynamixel = Dynamixel.read()
errorDynamixel = Dynamixel.read()
posDynamixel = Dynamixel.read(2)
chkDynamixel = Dynamixel.read()
print("Servo Position = " , int.from_bytes(posDynamixel,byteorder='little'))
time.sleep(1)
if GPIO.input(13):
GPIO.output(6,GPIO.LOW)
else:
GPIO.output(6,GPIO.HIGH)
GPIO.output(18,GPIO.HIGH)
Dynamixel.write(bytearray.fromhex("FF FF 01 05 03 1E 32 03 A3")) # Move Servo with ID = 1 to position 816
GPIO.output(18,GPIO.LOW)
startDynamixel = Dynamixel.read()
startDynamixel = Dynamixel.read()
idDynamixel = Dynamixel.read()
lenghtDynamixel = Dynamixel.read()
errorDynamixel = Dynamixel.read()
chkDynamixel = Dynamixel.read()
print("Servo ID = " , int.from_bytes(idDynamixel,byteorder='big') , " Errors = ", int.from_bytes(errorDynamixel,byteorder='big'))
time.sleep(1)
在您的 Raspberry Pi Zero 中启用 1Mbps 的 UART
确保将以下内容添加到 /boot/config.txt 的 Raspberry 配置文件中:
enable_uart=1
init_uart_clock=16000000
为什么我做到了?
很多人将 Dynamixel Servos 用于机器人项目,将 Raspberry 用于高控制器,并且一直要求我重新进货,因为他们想使用这些很棒的电机,但又不想弄乱电子设备部分,这就是为什么我决定根据这个令人敬畏的机器人社区的反馈生产一小批。
是什么让它特别?
它实现了 Savage Electronics Dynamixel 接口。电源直接从电池提供给电机和 Raspberry Pi Zero。易于安装。
下载该资料的人也在下载
下载该资料的人还在阅读
更多 >
- 基于诺基亚5110的Raspberry Pi帽子 0次下载
- mt32 pi midi帽子开源分享 0次下载
- 适用于Raspberry Pi 4的Raspberry Pi Pico开发板 6次下载
- 可视频直播的Raspberry Pi网络控制机器人 14次下载
- 树莓派Raspberry Pi 3 Model B+的电路原理图免费下载 176次下载
- 树莓派Raspberry Pi 4 Model B的电路原理图免费下载 370次下载
- 树莓派Raspberry Pi 3 Model B的电路原理图免费下载 175次下载
- 《爱上Raspberry Pi》中译版-电子书籍.pdf 0次下载
- Raspberry Pi 杂志《MagPi》1期 28次下载
- Instant Raspberry Pi Gaming 6次下载
- 使用Raspberry Pi 3 快速开发(相较于稀缺的 Raspberry Pi Zero) 13次下载
- Raspberry_Pi详解 15次下载
- raspberry_pi各版本差别 0次下载
- Getting Started with Raspberry Pi 0次下载
- Learn Raspberry Pi Programming with python 0次下载
- 5分钟内将Raspberry Pi Pico变成简单的示波器+波形发生器 453次阅读
- 基于Raspberry Pi 5的蜂窝物联网项目 646次阅读
- 使用Raspberry Pi Pico W和MicroPython开发物联网应用 939次阅读
- 用于测试项目的4个最佳树莓派Raspberry Pi模拟器 4868次阅读
- 基于树莓派产品 Raspberry Pi微控制器板的优缺点 2389次阅读
- 基于Raspberry Pi Pico开发先进的家庭自动化系统 2630次阅读
- 基于在Raspberry Pi Zero W的基础上实现设计微型机器人 1914次阅读
- 微雪电子ZeroW| Raspberry Pi ZeroW主板简介 2202次阅读
- 微雪电子Raspberry Pi 3 Model主板简介 2118次阅读
- 微雪电子Raspberry Pi 3 ModelB主板简介 2614次阅读
- 微雪电子Raspberry Pi 3 Model扩展板简介 1302次阅读
- 微雪电子树莓派4代B|Raspberry Pi主板介绍 5342次阅读
- 利用Raspberry Pi构建存储和虚拟化时间序列数据 788次阅读
- 一文了解Raspberry Pi 4各项性能跑分 2.8w次阅读
- 视觉享受!用Raspberry Pi实现圣诞树灯光秀 7959次阅读

 上传资料赚积分
上传资料赚积分下载排行
本周
- 1山景DSP芯片AP8248A2数据手册
- 1.06 MB | 532次下载 | 免费
- 2RK3399完整板原理图(支持平板,盒子VR)
- 3.28 MB | 339次下载 | 免费
- 3TC358743XBG评估板参考手册
- 1.36 MB | 330次下载 | 免费
- 4DFM软件使用教程
- 0.84 MB | 295次下载 | 免费
- 5元宇宙深度解析—未来的未来-风口还是泡沫
- 6.40 MB | 227次下载 | 免费
- 6迪文DGUS开发指南
- 31.67 MB | 194次下载 | 免费
- 7元宇宙底层硬件系列报告
- 13.42 MB | 182次下载 | 免费
- 8FP5207XR-G1中文应用手册
- 1.09 MB | 178次下载 | 免费
本月
- 1OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 2555集成电路应用800例(新编版)
- 0.00 MB | 33566次下载 | 免费
- 3接口电路图大全
- 未知 | 30323次下载 | 免费
- 4开关电源设计实例指南
- 未知 | 21549次下载 | 免费
- 5电气工程师手册免费下载(新编第二版pdf电子书)
- 0.00 MB | 15349次下载 | 免费
- 6数字电路基础pdf(下载)
- 未知 | 13750次下载 | 免费
- 7电子制作实例集锦 下载
- 未知 | 8113次下载 | 免费
- 8《LED驱动电路设计》 温德尔著
- 0.00 MB | 6656次下载 | 免费
总榜
- 1matlab软件下载入口
- 未知 | 935054次下载 | 免费
- 2protel99se软件下载(可英文版转中文版)
- 78.1 MB | 537798次下载 | 免费
- 3MATLAB 7.1 下载 (含软件介绍)
- 未知 | 420027次下载 | 免费
- 4OrCAD10.5下载OrCAD10.5中文版软件
- 0.00 MB | 234315次下载 | 免费
- 5Altium DXP2002下载入口
- 未知 | 233046次下载 | 免费
- 6电路仿真软件multisim 10.0免费下载
- 340992 | 191187次下载 | 免费
- 7十天学会AVR单片机与C语言视频教程 下载
- 158M | 183279次下载 | 免费
- 8proe5.0野火版下载(中文版免费下载)
- 未知 | 138040次下载 | 免费





 工商网监
工商网监
评论