电子的机器人业务由首席技术官负责,分为家庭娱乐业务小组和材料和生产研究小组两个小组,但是现在两个小组的人员都将集中到机器人业务中心。今年早些时候,LG在国际消费电子展(CES)上展示其新机器人,并且
2018-12-03 22:14:00
请各位大神指导,移动式机器人是怎么做EMC保护的,机器人是锂电池供电,所以就不能接大地了,那么对机器人的干扰是通过何种方式来释放或转移的?
2016-07-26 13:33:14
机器人技术不再是未来的幻想,它已经进入了我们的日常生活。但在这一领域,我们缺乏相应的法律法规。比如无人机,现在由美国联邦航空管理局( FAA)来管理,但很多人认为,这完全越权了;比如机器人
2015-01-13 16:39:57
直流电机如何实现驱动控制?机器人上到底用什么电机好?
2021-10-13 07:43:29
机器人的运动原理还是属于最基本的简单机械。机器人运动主要是依靠什么装置?有些什么装置是机器人用的比较多的?
2015-02-03 11:22:01
钢琴曲目的机器人,只需要它实现能弹奏曲目。因为现在刚刚接触机器人制作方面,只懂一些中断和舵机啥的,不知道做成的难度有多大,,,,希望各位前辈能够不舍赐教。如果能做成,都需要实现哪些模块呢?!
2017-05-22 17:09:06
钢琴曲目的机器人,只需要它实现能弹奏曲目。因为现在刚刚接触机器人制作方面,只懂一些中断和舵机啥的,不知道做成的难度有多大,,,,希望各位前辈能够不舍赐教。如果能做成,都需要实现哪些模块呢?!
2017-05-22 17:06:22
PID控制的优点有哪些?机器人控制技术有哪些重要性?
2021-06-18 08:02:56
的环境中。据说每个关节都给机器人一个自由度。图3: 机器人用电池作为驱动器的图像开车驱动器是“发动机”,驱动链接(连接之间的部分)到他们想要的位置。没有驱动器,机器人只能坐在那里,这通常是不可取的。大多数
2022-03-31 10:31:31
若说当下的热门科技,机器人绝对算一个。机器人作为典型的机电一体化技术密集型产品,它是如何实现运作的呢? 机器人的控制分为机械本体控制和伺服机构控制两大类,伺服控制系统则是实现机器人机械本体控制
2021-09-17 08:22:50
`机器人的主要技术参数 机器人的技术参数反映了机器人可胜任的工作、具有的最高操作性能等情况,是设计、应用机器人必须考虑的问题。机器人的主要技术参数有自由度、分辨率、工作空间、工作速度、工作载荷等
2017-08-15 14:00:52
机器人的定义是什么?机器人优点和缺点是什么?机器人是由哪些部分组成的?工业机器人的应用有哪些?
2021-07-05 06:48:21
安静高效的机器人正在接管——阻止它们已经太迟了。不,这不是机器人世界末日另一个可怕的故事。这是关于您下一设计硬件预算和规划面临威胁的问题。虽然您无法阻碍技术变革,但是您可以预测其影响。
2019-07-17 08:08:16
机器人的移动通常是从管理机器人总体任务进度的中央处理器发出位置变化请求时开始的。导航系统通过制定行程计划或轨迹以开始执行位置变化请求。行程计划需考虑可用路径、已知障碍位置、机器人能力及任何相关的任务目标。
2019-09-10 10:44:32
有人会用labview调用python吗,或者有其他方法能实现这个要求?我在labview做了一个磁场发生的程序,驱动磁机器人运动,而且我这个机器人是绕着一个向量旋转向前的,就输入幅值频率那些就可以
2022-11-18 16:21:25
老师给我们3个人分别发了msp430 launchpad、DSPc200 launchpad、51开发板,要求我们设计一块公用的板子,通过接插方式分别实现对机器人的控制。也就是说当430插在
2014-04-21 10:04:34
0引言传感器技术是仿人机器人研究的关键技术之一。仿人机器人之所以能在已知或未知的环境中完成一定的作业功能,是因为它能够通过传感器感知外部环境信息和自身状态,获得反馈信息,实现系统的闭环控制。目前在仿
2019-07-29 06:09:58
传感器技术是仿人机器人研究的关键技术之一。仿人机器人之所以能在已知或未知的环境中完成一定的作业功能,是因为它能够通过传感器感知外部环境信息和自身状态,获得反馈信息,实现系统的闭环控制。目前在仿人机器人
2019-09-18 06:17:46
家庭服务机器人是机器人的发展方向,是我国进一步加强机器人技术研究的突破口。家庭服务机器人旨在将家庭成员从家居的繁琐家务中解放出来,给家庭成员提供帮助、娱乐等。
2019-08-20 06:57:41
较多。本方案采用的是真空吸附式爬壁机器人进行检测,目前已解决粗糙表面的吸附、灰尘过滤等工作,在机器人控制系统的设计中用到四路ADC,两路串口,一路CAN总线接口,一路SPI,以及多路外扩IO口。
2015-07-07 08:50:04
使用,如果效果良好今后有望为实验室从事控制的同学使用。项目描述:该项目用于当前高铁隧道表面质量的检测,隧道表面为粗糙混凝土,灰尘较多。本方案采用的是真空吸附式爬壁机器人进行检测,目前已解决粗糙表面的吸附
2015-07-07 08:54:38
路由器与上位机连接。加以电源电路,机电驱动,光电传感电路,灭火风扇以及其它电路构成。电源电路提供系统所需的电源,专用电机驱动芯片驱动电机控制机器人的前后移动和左右转向。地盘采用坦克地盘从而实现全地形
2015-10-21 10:18:18
就是说,一个机器人发指令,一堆机器人向这个机器人靠拢,可以通过zigbee么?或者是别的什么传感器?先谢过了!
2012-09-26 18:50:15
一个巡逻机器人的设计随着计算机技术和信息技术在各个领域的快速发展、极大的促进了智能机器人的研究,其中智能移动机器人占有重要地位、移动机器人能完成人类在生产生活当中不能完成的任务,可以替代人类完成一些
2016-01-04 14:26:35
提 出 了一 种 微 小 爬 壁 机 器 人 三 维 位 置 测 量 的新方 法 。笔 者 通 过 深 入 分 析 研 究各 种 位 置 测 控 方 法 与 系统 ,提 出采 用单 目视 觉方 法
2023-09-20 07:25:43
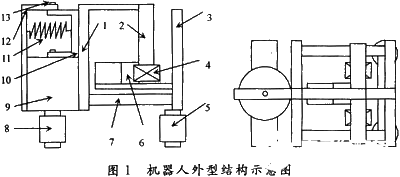
采用负压吸附、轮式驱动结构[2-3]。工作时,机器人吸附在玻璃面上,通过全方位移动,实现对玻璃的清洁。清洁机器人结构的三维实体模型如图2所示,由车轮、过滤器、微型真空泵、同步齿形带、直流减速电机、底盘
2011-09-08 15:51:03
能。常用的驱动电机主要包括步进电机和直流电机。 爬壁机器人要实现在竖直玻璃壁面上的移动,对电机的扭矩要求很高,但一般步进电机的扭矩都较小。为使扭矩达到要求,电机的体积和质量都会非常大,不能满足本文扭矩
2012-12-20 10:29:35
机器人驱动装置是什么?机器人驱动装置系统是由哪些部分组成的?
2021-07-05 07:05:10
什么是机器人控制系统?机器人的运动控制系统包含哪些方面?机器人控制系统的基本功能有哪些?
2021-10-11 09:38:12
清洁机器人是服务机器人的一种,所谓服务机器人是指自主或半自主的、从事非生产活动、能完成有益于人类健康的服务工作的机器人。家庭清洁机器人集机械、电子、传感器、计算机、控制、机器入技术、人工智能等诸多
2019-09-05 06:56:37
申请了专利。该专利的要点是借助伺服技术控制机器人的关节,利用人手对机器人进行动作示教,机器人能实现动作的记录和再现。这就是所谓的示教再现机器人。现有的机器人差不多都采用这种控制方式。1959年第一台工业
2015-01-19 10:58:38
龙人四足机器人是一种仿生机器人,由Openduino控制板控制,有四条腿,每条腿两个自由度,由两个舵机驱动,能实现两种步态行走。配有三个超声波,实现大角度智能避障。标准演示程序有5个可爱的表演动作。重要技术点: 四足机器人的行走步态设计、舵机的梯形速度控制、多路舵机的协调控制
2016-03-24 16:17:53
工业机器人的四大特征是哪些?工业机器人是由哪些部分组成的?工业机器人是怎样进行划分的?
2021-10-11 09:10:17
请问哪位大神做过真空吸附式或者非磁铁式的爬墙机器人,能否提供一些经验或者资料
2015-03-26 10:43:20
求一套写字机器人的程序,用arduino编写的。怎么实现
2020-10-17 15:20:25
`华南机器人应用培训中心拥有各种设备,开展各种不同的机器人培训班。打造各种工业现场常见的机器人工作站,现开展KUKA、发那科、三菱、ABB、爱普生工业机器人培训对外招生。 一、认识机器人技术:工业
2015-09-02 14:03:18
所谓国产机器人发展到什么水平,主要是指技术水平。简单的做出相差多少年的判断是不切实际的。事实上,关于机器人发展水平的问题应该从这以下几个方面进行分析。控制系统方面1.控制芯片以及基础软件方面从
2018-10-15 10:46:09
——工业机器人的智能化程度要求也越来越高,采用深度学习技术为工业机器人赋能是目前各大厂商的统一认知。本文结合实际案例,简要说明一下智能机器人的实现流程。一、智能机器人概念 人工智能技术,其主要作用就是用
2018-05-31 09:36:03
基本工作单元,以滚珠丝杆、同步皮带、齿轮齿条为常用的传动方式所架构起来的机器人系统,可以完成在XYZ三维坐标系中任意一点的到达和遵循可控的运动轨迹。多轴机器人采用运动控制系统实现对其的驱动及编程控制,直线
2020-07-29 06:57:04
移动机器人利用导航技术,获得机器人的目前所处的位置,结合传感器技术对周围外界环境(障碍物等)作实时探测,并根据环境提供的信息规划一条可行路径完成达到目标点的任务。移动机器人技术涉及到传感器技术
2020-11-23 15:08:52
怎样去实现ROS机器人的定位导航呢?如何对ROS机器人的定位导航进行仿真?
2021-12-23 09:22:45
性能与可靠的机械控制性能的同时保证,才能在短时间内准确寻找到火源并灭火回家。在此以ARM9处理器为核心,对基于嵌入式系统的智能灭火机器人进行了设计。本文将从硬件和软件方面讲述智能灭火机器人控制器的实现方法,并且给出了机器人灭火的具体实验,验证了方案的可行性,为智能灭火机器人的进一步研究提供了平台。
2019-07-31 06:23:18
今天,机器人正被应用于那些先前不曾使用机器人的生产领域。针对不同的情况,必须始终分别考虑各个安全方面并针对每种应用实施合适的安全解决方案。安全的传感器技术举足轻重:为了满足所有安全相关的应用,需要采用满足传感器需要的模块化方法。
2020-05-07 08:16:08
闭环控制,一般应用于高精度、高速度的机器人驱动系统中。步进电动机驱动系统多适用于对精度、速度要求不高的小型简易机器人开环系统中。交流伺服电动机由于采用电子换向,无换向火花,在易燃易爆环境中得到了广泛
2015-01-23 14:33:53
随着中国制造业转型步伐的加快,机器人的使用越来越频繁,作为工厂里的技术工程师必需了解机器人的相关技术,那么通用机器人由什么部件组成呢?
2020-05-13 07:45:10
,对应不同层次的开发,系统中各个层次内部由若干个功能相对对立的模块组成,这些功能模块相互协作共同实现该层次所提供的功能。 (3)机器人的故障诊断与安全维护技术:通过各种信息,对机器人故障进行诊断,并进
2018-11-23 10:40:38
机器人技术是综合了计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域。机器人应用情况,是一个国家工业自动化水平的重要标志。
2020-03-27 09:03:30
较低。谐波传动装置在机器人技术比较先进的国家已得到了广泛的应用。仅就日本来说,机器人驱动装置的60%都采用了谐波传动。美国送到月球上的机器人,其各个关节部位都采用谐波传动装置,其中一只上臂就用了30个
2018-10-12 10:16:22
怎么实现六足机器人的设计?
2021-11-22 08:02:22
怎么实现基于stm32的grbl写字机器人的设计?
2021-11-26 06:52:18
怎么实现对机甲大师机器人的控制?
2021-11-19 06:33:45
定位导航技术使机器人即使在无人操控的情况下,也可实现自主行走、避障及顺利到达目的地,机器人和人类绘制地图一样,在描述环境及认识环境的过程中都需要依靠地图,它主要利用地图类描述其当前环境信息,并随着
2020-08-18 06:47:00
机器人的综合控制驱动板是由哪些部分组成的?怎样去设计一块基于stm32f103rct6芯片的机器人综合控制驱动板呢?
2021-12-23 07:15:27
。 .但与液压驱动装置相比,功率较小,刚度差,噪音大,速度不易控制,所以多用于精度不高的点位控制机器人。1、具有速度快、系统结构简单,维修方便、价格低等特点。适于在中、小负荷的机器人中采用。但因难于实现伺服
2018-10-30 15:11:29
与液压驱动装置相比,功率较小,刚度差,噪音大,速度不易控制,所以多用于精度不高的点位控制机器人。1、具有速度快、系统结构简单,维修方便、价格低等特点。适于在中、小负荷的机器人中采用。但因难于实现伺服控制
2018-10-30 15:02:58
关于ros智能机器人,就是一个写智能机器人代码的一个虚拟机,
2021-10-13 19:20:16
目前许多高等教育院校采用教育机器人进行课堂教学和培养学生的创新能力。本文设计的教育机器人通过红外光电传感器阵列检测路面信息并利用模糊自整定PID算法将采集的路面信息和电机运行数据进行实时处理,实现教育机器人的智能巡航并将机器人的状态显示输出。
2020-03-17 06:59:50
显示工作状态;微信联上扫地机器人可以进行查询操作,可以向扫地机器人推送操作指令。 五 应用案例展示爱洁客根据开发快提供的的智能化方案,采用WiFi模块和ET-iLink联技术,快速实现智能控制。——————扫地机器人硬件调试场景————————————微信操作界面——————`
2017-05-27 13:31:20
项目说明:室内地面清洁是人们生活中较为频繁的劳动,传统吸尘器工作时需要人的参与,且操作不便。室内地面清洁机器人将智能手机、移动机器人技术和吸尘器技术有机地融合起来,结构灵巧,实现了室内环境的自主清洁
2013-11-08 22:30:10
气象站的部分功能;5.可实现智能家居可视化控制;推广前景:机器人行业已成为一个快速发展的产业,市场空间巨大,前景广阔。机器人的出现,极大地提升了生产品质并成功解放了劳动力资源。随着信息技术的发展,现代化
2015-12-02 19:08:42
需要球童携带球杆跟随。此项设计的智能高尔夫服务机器人能有效代替球童部分工作,其主要功能是携带球杆,自动定距跟随球手。智能高尔夫服务机器人采用单片机HT46F49E作为机器人的主控芯片,利用红外定位
2013-10-27 18:20:36
有什么机器人技术的资料?单片机开发的.
2011-06-21 10:42:25
20世纪以来随着电子技术的不断发展,以及人类对于自身的不断了解,机器人的研究也在不断的深入。现阶段能做出外表接近人类的机器人,走路接近人类的机器人……但这些都属于很前沿的领域,研究门槛高,实际的商业用途不是很广,所以大多还停留在样品阶段,走进市场的很少。
2019-10-16 08:27:30
机甲大师机器人的软件架构设计如何实现?
2021-11-22 07:55:21
工程训练综合能力大赛——水下机器人管道巡检组赛后总结前言一、水下机器人管道巡检组内容简述二、功能实现1.巡检管道2.识别吸附物总结前言前段时间参加了工程训练综合能力大赛——水下机器人管道巡检组,非常
2022-01-11 06:51:45
机器人的长期稳定运行。对于控制算法的实现,可以采用PID控制器或者模糊控制器,以达到更加精准的控制效果。
最常见的是TB67S249FTG芯片,它是一种适用于双极性步进电机的驱动芯片,采用了先进
2023-05-11 15:12:45
碉堡了!!飞檐走壁的机器人你信吗?不多说眼见为实
2016-01-19 14:56:43
`请教大咖:朋友送我一台广州刘之顿公司的绘图机器人,但没有驱动程序。求大咖赐教。谢谢 谢谢`
2021-06-04 07:23:07
让机器人实现智能的关键技术到底是什么?这些技术在最近十年会发展到什么程度?整个产业的应用前景将会如何?
2021-07-05 06:55:38
随着人工智能技术的发展,机器人已经开始接管人类的部分工作,例如快递、工厂作业、餐厅服务员甚至媒体编辑---纽约时报就聘请了一位机器人做总编。未来,机器人可以介入半导体设计开发吗?例如,机器人可以进行FPGA开发吗?
2019-10-10 06:33:18
我是新人,求帮助啊,明天需要提交轮式机器人应用的报告,求大神给点建议,可用轮式机器人应用于那些方面,要求实际可行,应用于生活,农业,军事都可以,谢谢啦
2013-04-17 16:32:16
通过轮子的滚动实现移动,通过机械零件的增加和算法的改进,逐渐实现动物甚至人体的肢体行走。下面的框图列出了实现这样的一个机器人需要采用的可能的技术: 辰汉-高性能嵌入式处理器上运行着机器人
2017-06-09 17:18:49
高速巡线机器人卓大大!这个巡线小车好厉害的,还能飞檐走壁,智能车啥时候也这样?▲ 敏捷巡线机器人飞檐走壁回复:在网站 HBFS Robotics 给出了这种高速巡线机器人的相关技术指标,值得大家借鉴
2021-07-22 09:07:52
针对传统油罐检定方法中,径向偏差测童精度低、操作危险、效率低等问题,研制一种小型的立式金属罐爬壁检定机器人。该机器人采用永磁吸附三轮式结构,测控系统以单片机89
2009-03-14 08:30:38 23
23 首先,简要介绍四足微型爬壁机器人的机构部分,然后详细介绍四足微型爬壁机器人控制系统的硬件设计, 以及实时多任务操作系统μC/OS - II 在Philips 公司32 位ARM 处理器LPC2104 上的
2009-05-16 14:59:3042 提出了一种微小爬壁机器人三维位置测量的新方法。笔者通过深入分析研究各种位置测控方法与系统,提出采用单目视觉方法中的聚焦法,以CCD 作为传感器,用三点法实现对机器人的三
2009-07-06 09:40:287 区别于使用真空发生器抽吸空气产生真空的传统爬壁机器人,本文介绍了一种利用吸盘自身形变和机构运动产生真空,在壁面上爬行的被动吸盘履带式机器人结构特点,并对其控制
2009-08-10 09:20:0434 首先, 简要介绍四足微型爬壁机器人的机构部分, 然后详细介绍四足微型爬壁机器人控制系统的 硬件设计, 以及实时多任务操作系统 c/os—I I在Phi¨ P s公司32位ARM处理器LPC2 1 0
2009-12-04 16:14:4336 产品介绍 ABB机器人产品线丰富,包括多关节机器人、协作机器人、喷涂机器人、SCARA机器人以及自主移动机器人(AMR)等多关节机器人:ABB的多关节机器人是六轴关节型
2024-09-30 17:56:07
呢?它利用了什么原理呢?李博士介绍说,爬壁机器人利用负压发生器和负压枪来实现这一过程。负压发生器设有多个单吸盘,通过排气来实现吸盘的吸附,在排出的气量大于进气量时,就会形成负压,外面的大气压就会很
2010-12-14 21:27:38 2145
2145 目前,市场上虽然出现了一些爬壁机器人,但至今还没有一种专门针对玻窗清洁的机器人。本文介绍了一种基于负压吸附的轮式玻窗清洁机器人,将其用于高层住宅的的玻璃清洗工作。
2011-09-23 14:06:433026 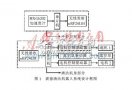
从能耗的角度,研究了负压式爬壁机器人支撑轮和密封气囊压力分配的理论依据,提出了支撑轮压力系数的概念,从理论上分析了支撑轮压力系数与机器人功耗之间的关系,研究结果对
2011-10-11 15:17:5133 用于玻璃幕墙清洗的爬壁机器人的研制_张子博
2017-01-14 22:32:465 等人工无法测量,而导致计量失准。文中研制一种永磁吸附三轮步进结合四足支撑的运动方式1:1爬壁机器人解决立式金属罐检定过程中的存在的问题。
2017-11-07 14:36:124 针对大型容器焊缝及热影响区域人T打磨存在效率低、一致性差等问题,根据打磨T艺要求对打磨过程进行了打磨效果及影响因素分析等T艺研究,基于打磨T艺的研究结果对爬壁打磨机器人进行了功能和性能需求分析,建立
2018-03-09 16:44:021 2018年10月11日,江苏连云港,中船重工716研究所技术人员在调试一款爬壁机器人。位于高新区的中船重工716研究所自主研制的除锈爬壁机器人,在武昌船舶公司自动化激光除锈除漆试验中获得成功,改变了国内在船舶涂装机器人系统无成熟产品推广的局面,为我国船舶智能制造业发展提供了保障。
2018-10-25 09:35:094451 爬壁机器人研发商史河科技(Robot++),已完成2000万元Pre-A轮投资,BV百度风投领投、智能电网创投跟投,老股东熊猫资本继续追投,投后估值1.2亿元。
2018-12-11 14:59:135974 目前对于管道壁面检测的爬行机器人的运动方式主要有轮式、履带、脚足式三种结构方式来实现机体在管道上的移动。
2020-04-08 16:22:3521838 辅助或替代人工进行风电塔筒的检修ꎬ具备两个旋转自由度ꎬ采用了一种新型永磁爬壁吸附结构ꎬ可稳定吸附于风电塔筒外壁面并在壁面移动ꎻ利用 Solidworks、Maxwell 等软件进行了爬壁机器人的结构建模及吸附机
2020-05-07 08:00:003 基于降级模糊避障控制算法的爬壁机器人
2021-07-02 11:52:5217 爬壁机器人是一种可以在垂直或近垂直表面上移动和操作的机器人。它们被设计用于执行特定任务,例如在建筑物外墙进行清洁、在工厂内部的管道进行检测和维护,或在危险的环境中进行探索等。
2023-07-27 14:56:312756 爬壁机器人的零件组成可以根据不同的设计和应用而有所差异。以下是一般常见的爬壁机器人零件。
2023-08-01 16:15:092803 选择和使用磁吸附爬壁机器人时,需要根据具体应用的需求和安全性要求来评估和确定其适用的载重能力。最好参考机器人制造商提供的技术规格和建议,以获取准确的载重能力信息。
2023-08-04 15:37:133285 爬壁机器人常用的吸附方式有以下几种:真空吸附、磁性吸附、静电吸附、粘附吸附。
2023-08-09 15:24:216687 机器人具有各种各样的形状和尺寸,可以适应不同的工作场景和表面。爬壁机器人通常具有以下特点和功能:1.吸附能力:爬壁机器人能够通过吸附或粘附方式将自身固定在墙壁或表面上
2023-08-01 00:27:022365 
爬壁机器人可以根据其工作原理、设计和应用领域进行分类。以下是一些常见的爬壁机器人分类:1. 吸盘式爬壁机器人;2. 磁力式爬壁机器人;3. 轮式爬壁机器人。
2023-08-21 14:53:312096 爬壁机器人:
- 爬壁机器人是专门设计用于在垂直壁面上爬行的机器人。
- 爬壁机器人通常具有特殊的机构或结构设计,如吸盘、切削或粘附机构等,以实现在垂直壁面上的附着和行走能力。
- 爬壁机器人主要用于墙壁、玻璃、建筑物等表面的检测、检修、清洁等任务,能够在垂直表面上精确移动。
2023-08-22 15:05:131051
 电子发烧友App
电子发烧友App















 工商网监
工商网监
评论