 波士顿动力轮式机器人Handle升级,其可在仓库内搬运堆叠货箱
波士顿动力轮式机器人Handle升级,其可在仓库内搬运堆叠货箱

波士顿动力(Boston Dynamics)以双足和四足机器人而闻名,不过,最近泄露的一段波士顿动力创始人Marc Raibert的演讲视频显示,这家公司正在尝试另一种技术:轮子。
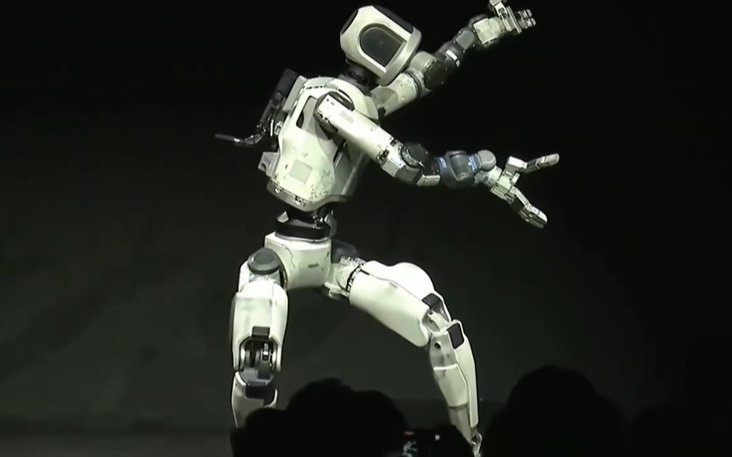
该公司的新型轮式直立机器人名为“Handle”(因为它设计的初衷就是用来搬运物体),外形看起来像Segway平衡车和两条腿的Atlas机器人的结合体。Handle机器人还未正式发布,不过那段演讲视频已经被风险投资人Steve Juveston上传到YouTube。
Raibert称“Handle”是一次车轮和腿的结合实验,Handle的动态系统能够让它一直保持平衡,并且知道如何分配重量,保持重心稳定。他补充说,虽然Handle牺牲了部分在不平坦的道路上行走的能力,但是与足型机器人相比,Handle的效率要更高。
不过,根据泄露的视频,Handle仍然能够在不是那么平坦的草地上行驶,并且能够跃过一定高度的障碍物。
虽然波士顿动力的Atlas以及Cheetah等机器人的惊艳表现吸引了大众的注意,但是这家公司一直没能推出一款可商用化的产品。Handle能够在没有复杂地形的环境(类似仓库)里执行搬运物体等基本任务,对波士顿动力来说,是有重要意义的。
2013年,波士顿动力被谷歌的母公司Alphabet收购,但是在去年3月,彭博社曾报道,Alphabet正寻求出售这家公司。Alphabet的高管称,该公司不会再为这个要花费数十年的产品投入更多的资源。当时丰田和亚马逊都被认为是潜在的收购者。但是,自从那次报道之后,外界就再没听过波士顿动力的相关信息。或许,Handle的推出能够帮助波士顿动力吸引新的买家。
-
机器人
+关注
关注
214文章
31634浏览量
224520 -
波士顿动力
+关注
关注
3文章
178浏览量
14088
原文标题:英国监督机构指责华为未解决设备安全漏洞
文章出处:【微信号:drc_iite,微信公众号:全球技术地图】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
行业独创!寻迹智行线缆线盘搬运机器人,开启线缆搬运智能化新纪元

再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
CES 2026机器人争霸:中国军团携全栈技术突围,波士顿动力Atlas遇劲敌
普渡D5在全球首个机器人登高挑战赛中斩获轮式四足机器人组冠军

工业机器人TOP1,切入人形机器人赛道,意欲何为?

【案例分享】电子谷多芯线束赋能高效产线!AGV 搬运机器人稳定连接方案

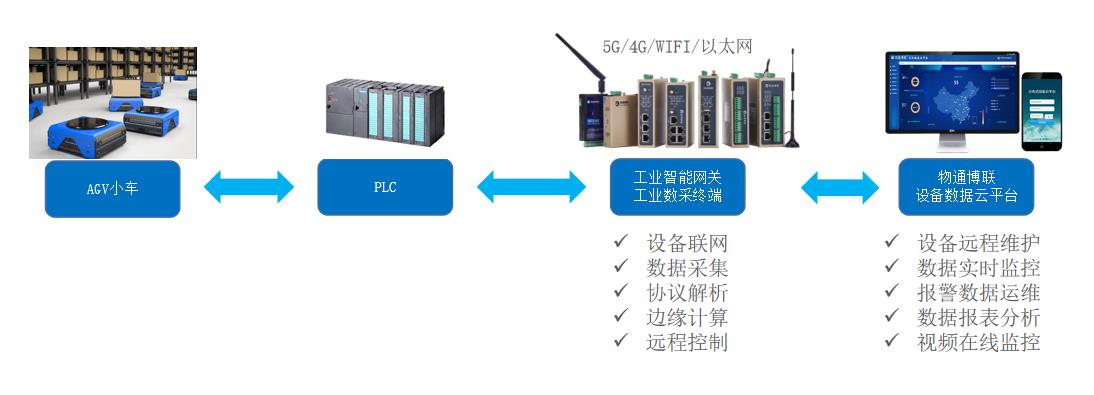
AGV搬运机器人联网监控系统方案
复合机器人开启血浆包“零接触”搬运新时代

Meta重磅入局人形机器人,目标打造“机器人界的安卓系统”
全国首届人形机器人线缆技术研讨会圆满召开!
为更智能的移动仓库机器人提供动力

富唯智能复合机器人医疗料箱上下料搬运案例
对话:人形机器人连接器与线缆有何攻关点?




评论