 六轴机器人的结构图
六轴机器人的结构图

六轴机器人的结构图
六个伺服电机直接通过谐波减速器、同步带轮等驱动六个关节轴的旋转,注意观察一、二、三、四轴的结构,关节一至关节四的驱动电机为空心结构,关节机器人的驱动电机采用空心轴结构应该不常见,空心轴结构的电机一般较大。
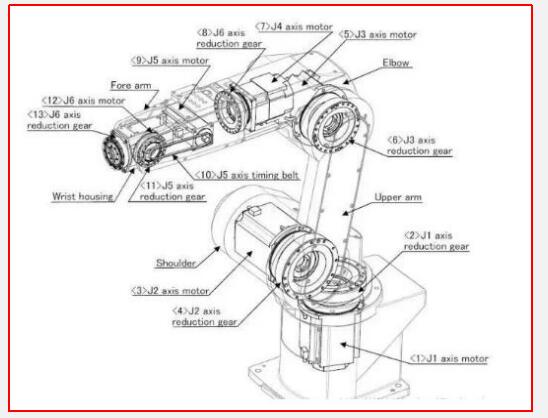
采用空心轴电机的优点是:机器人各种控制管线可以从电机中心直接穿过,无论关节轴怎么旋转,管线不会随着旋转,即使旋转,管线由于布置在旋转轴线上,所以具有最小的旋转半径。
此种结构较好的解决了工业机器人的管线布局问题。对于工业机器人的机械结构设计来说,管线布局是难点之一,怎样合理的在狭小的机械臂空间中布置各种管线(六个电机的驱动线、编码器线、刹车线、气管、电磁阀控制线、传感器线等),使其不受关节轴旋转的影响,是一个值得深入考虑的问题。
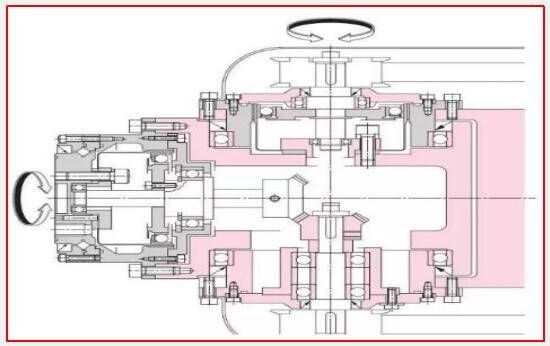
常见的机器人腕部结构如图2~图4所示,在这三种手腕部的结构中,以第一种(RBR型)结构应用最为广泛,它适应于各种工作场合,后两种结构应用范围相对较窄,比如说3R型的手腕结构主要应用在喷涂行业等。

六轴关节机器人的腕部关节设计较为复杂,因为在腕部同时集成了三种运动。小型的六轴关节机器人的腕部关节主要采用谐波减速器。图4较为详细地描述了常见的六轴关节机器人的腕部结构,其腕部关节用到了两个谐波减速器,两个同步齿型带传动输入,中间还用到了一对锥齿轮副传动。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
30590浏览量
219597 -
六轴机器人
+关注
关注
0文章
42浏览量
4846
发布评论请先 登录
相关推荐
热点推荐
为何人形机器人离不开六维力传感器?
机器人双足仿生的结构,使其与环境的交互远比传统工业机器人复杂。无论是抓取一个易碎的鸡蛋,还是在不平坦的地面上行走,都需要对力和力矩进行实时、精确的感知与反馈。这正是力传感器的核心价值所在。
小萝卜机器人的故事
经过我的申请,
马老师发放了,
小萝卜机器人的,
开发权限,
原来的小萝卜公司,
因为经营不善倒闭,
作为科研产品,
几个技术对此惋惜,
自掏腰包,
要让小萝卜机器人,
再生,
每次听到小萝卜说
发表于 10-23 05:24
发那科推出全新M-710iD系列六轴多功能机器人
广受欢迎的六轴多功能机器人M-710系列迎来全面升级!发那科全新推出M-710iD/50M与M-710iD/70机器人,为机床上下料、物料搬运、装配、码垛及焊接应用树立新标杆。
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
帮助机器人实时修正重心,大幅降低翻倒风险。
在关节运动控制上,磁传感器芯片实现 “毫米级精度保障”。以昆泰芯 KTM59 系列磁编码器的离轴应用为例,其非接触式磁信号捕捉技术,解决了传统光学编码器在
发表于 08-26 10:02
工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22
机器人看点:越疆机器人正式发布六足仿生机器狗 智元公布机器人运动控制模型专利
”具身机器人平台的企业。 此前越疆机器人发布的六足仿生机器狗是集“认知、动作、机动”三大核心能力于一体的创新产品,而且六足架构既具备优于四足
大象机器人携手进迭时空推出 RISC-V 全栈开源六轴机械臂产品
大象机器人成立于2016年,专注协作机器人研发与应用,产品线涵盖轻量级协作机器人、人形机器人、仿生机器人等多种形态。拳头产品myCobot系

盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-
发表于 05-13 15:02
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
ROS的全称:Robot Operating System 机器人操作系统
ROS的 目的 :ROS支持通用库,是通信总线,协调多个传感器
为了解决机器人里各厂商模块不通用的问题,让机器人快速开发
发表于 04-30 01:05
大象机器人携手进迭时空推出 RISC-V 全栈开源六轴机械臂产品
大象机器人成立于2016年,专注协作机器人研发与应用,产品线涵盖轻量级协作机器人、人形机器人、仿生机器人等多种形态。拳头产品myCobot系
发表于 04-25 17:59
人形机器人核心配件之六维力传感器
随着科技的飞速发展,人形机器人正逐渐成为现实生活中的一部分。这些机器人不仅在工业生产中发挥着重要作用,还在医疗、科研、服务等多个领域展现出巨大的潜力。而在这类机器人的众多核心配件中,六
开源项目!基于Arduino控制的六足机器人
这款六足机器人的设计灵感来源于Trossen Robotics的PhantomX AX型号。原版PhantomX(已停产)售价高达1300美元,远超我的预算,因此我决定采用廉价的180度
发表于 03-03 11:25
【「具身智能机器人系统」阅读体验】2.具身智能机器人的基础模块
具身智能机器人的基础模块,这个是本书的第二部分内容,主要分为四个部分:机器人计算系统,自主机器人的感知系统,自主机器人的定位系统,自主机器人
发表于 01-04 19:22
【「具身智能机器人系统」阅读体验】+初品的体验
《具身智能机器人系统》 一书由甘一鸣、俞波、万梓燊、刘少山老师共同编写,其封面如图1所示。
本书共由5部分组成,其结构和内容如图2所示。
该书可作为高校和科研机构的教材,为学生和研究人员提供系统
发表于 12-20 19:17
安川工业机器人结构
的连接线缆,也可以根据现场的实际需求来进行选配。 --机器人本体各部分组成:由图可知安川6轴工业机器人可分为机器人底座、S头、L臂、U臂、手腕法兰盘,对应一到






 工商网监
工商网监
评论