 最新传感器技术:MEMS陀螺仪在任何情况下都能精确的惯性传感
最新传感器技术:MEMS陀螺仪在任何情况下都能精确的惯性传感

越来越多的应用需要从位于极高温度环境中的传感器收集数据。近年来,在半导体,无源器件和互连中取得了相当大的进步,以实现高精度数据采集和处理。然而,对于可以在高达175°C的温度下工作的传感器仍然存在未满足的需求,特别是在微机电系统(MEMS)提供的易于使用的形状因子中。与传感器等效传感器相比,MEMS传感器通常更小,功率更低,成本更低。此外,他们还可以在同一半导体封装中集成信号调理电路。
高温MEMS加速度计-ADXL206已经发布,可提供高精度倾斜(倾斜)测量。然而,仍然需要额外的自由度来精确地测量系统在恶劣环境应用中的运动,其中最终产品可能受到严重的冲击,振动和剧烈运动。这种类型的滥用可能导致系统过度磨损和早期故障,从而导致维护或停机成本高。
为了满足这一需求,ADI公司开发了一种带有集成信号调理功能的新型高温MEMS陀螺仪, ADXRS645。该传感器即使在存在冲击和振动的情况下也能实现精确的角速率(转速)测量,额定温度可达175°C。
操作原理
MEMS陀螺仪通过科里奥利加速度测量角速率。科里奥利效应可以解释如下,从图1开始。考虑自己站在靠近中心的旋转平台上。您相对于地面的速度显示为蓝色箭头长度。如果你要移动到靠近平台外缘的点,你的速度会相对于地面增加,如较长的蓝色箭头所示。由径向速度引起的切向速度的增加率是科里奥利加速度。
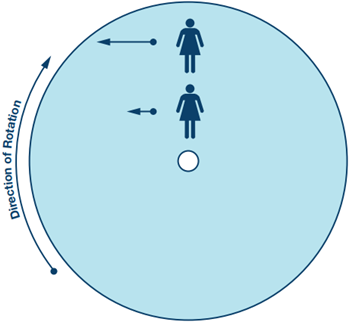
如果Ω是角速率而 r 是半径,切向速度为Ωr。因此,如果r以速度v变化,则会出现切向加速度Ωv。这是科里奥利加速度的一半。另外一半是改变径向速度的方向,总共提供2Ωv。如果你有一个质量(M),平台必须施加一个力 - 2MΩv-来引起加速度,并且质量会经历相应的反作用力。 ADXRS645通过使用类似于在旋转平台上移出和移出的人的共振质量来利用这种效果。质量由多晶硅微加工而成,并与多晶硅框架相连,因此它只能沿一个方向共振。
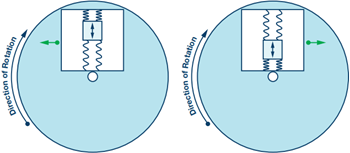
图2显示当共振质量向旋转的外边缘移动时,它会加速向右并向框架施加向左的反作用力。当它向旋转中心移动时,它会向右施加一个力,如绿色箭头所示。
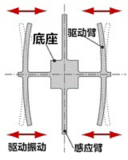
为了测量科里奥利加速度,包含共振质量的框架通过相对于共振运动成90°的弹簧系在基板上,如图3所示。该图还显示科里奥利感应指用于通过电容转换来感应框架的位移,以响应质量所施加的力。
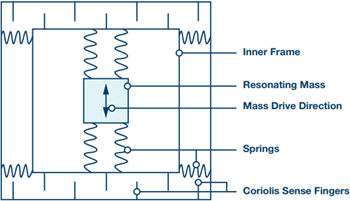
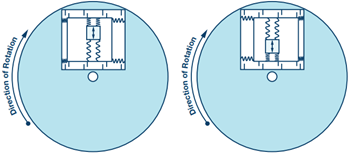
图4显示了完整的结构,表明当共振质量移动时陀螺仪安装的表面旋转,质量及其框架经历科里奥利加速度并从振动运动平移90°。随着旋转速率的增加,质量的位移和从相应的电容变化得到的信号也增加。应该注意的是,陀螺仪可以放置在旋转物体上的任何位置并且可以任何角度,只要其感测轴平行于旋转轴即可。
电容式感应
ADXRS645通过连接到谐振器的电容式感应元件测量共振质量及其框架的位移,这是由于科里奥利效应,如图4所示。这些元件是硅梁与连接到基板的两组固定硅梁相互交叉,从而形成两个标称相等的电容器。由于角速率引起的位移会在该系统中产生差分电容。
在实践中,科里奥利加速度是一个非常小的信号,产生几分之一的光束偏转和相应的电容变化,大小为zeptofarads。因此,最小化对寄生源的交叉敏感性是极其重要的,例如温度,封装应力,外部加速度和电噪声。这是通过将电子器件(包括放大器和滤波器)置于与机械传感器相同的芯片上来实现的。然而,在信号链尽可能远的地方进行差分测量更重要,并将信号与谐振器速度相关联,尤其是处理外部加速度的影响。
振动抑制
理想情况下,陀螺仪只对旋转速率敏感,而不是其他任何东西。在实践中,由于其机械设计的不对称性和/或微机械加工不精确性,所有陀螺仪都对加速度具有一定的敏感性。事实上,加速度灵敏度有多种表现形式 - 其严酷程度因设计而异。最重要的通常是对线性加速度(或 g 灵敏度)和振动校正(或 g 2 灵敏度)的敏感性,并且可能非常严重到完全淹没了零件的额定偏置稳定性。当速率输入超出额定测量范围时,一些陀螺仪的输出从轨道摆动到轨道。其他陀螺仪在受到小到几百的冲击时会有锁定的倾向。这些陀螺仪不会受到冲击的损坏,但它们不再响应速率,需要重新启动才能重新启动。
ADXRS645采用了一种新颖的角速率传感方法,可以抑制冲击高达1000 g - 它使用四个谐振器来差分检测信号并抑制与角运动无关的共模外部加速度。图5中的顶部和底部谐振器对是机械独立的,并且它们反相运行。结果,它们测量相同的旋转幅度,但给出相反方向的输出。因此,传感器信号之间的差异用于测量角速率。这取消了影响两个传感器的非旋转信号。信号在前置放大器之前的内部硬连线中组合。因此,极大地阻止了极端加速度过载到达电子设备 - 从而允许信号调节在大冲击期间保持角速率输出。
传感器实现
图6显示了陀螺仪及相关驱动和感应电路的简化原理图。
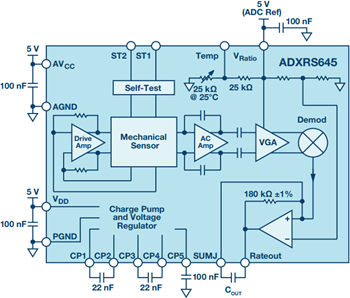
谐振器电路检测谐振质量的速度,放大并驱动谐振器,同时保持相对于科里奥利信号路径的良好控制的相位(或延迟)。科里奥利电路用于通过下游信号处理来检测加速度计框架的运动,以提取科里奥利加速度的大小并产生与输入旋转速率一致的输出信号。此外,自检功能会检查包括传感器在内的整个信号链的完整性。
应用示例
其中一个最苛刻的在石油和天然气井下钻井行业中可以遇到电子设备的环境。这些系统利用多个传感器来更好地了解钻柱在地面下的运动,优化操作并防止损坏。以RPM为单位测量的钻削速度是钻机操作员始终需要知道的关键指标。传统上,这是用磁力计计算的。然而,磁力计受到钻井套管和周围钻孔中存在的含铁材料的干扰。它们也必须安装在特殊的非磁性钻铤(外壳)中。
除了简单的RPM测量之外,人们越来越关注理解钻柱的运动或钻井动力学以最佳地管理诸如施加的力量,旋转速度和转向之类的参数。管理不善的钻井动力学可能导致钻头的高振动和极不稳定的运动,导致到目标区域的钻井时间更长,设备过早失效,难以操纵钻头,以及井本身受损。在极端情况下,设备可能会被破坏并留在井中,然后必须以非常高的成本回收。
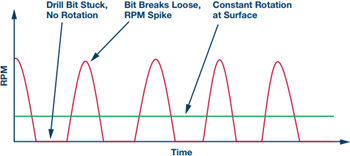
钻井参数管理不善导致的一种特别有害的运动被称为粘滑。粘滑是钻头卡住的现象,但钻柱的顶部继续旋转。当钻头卡住时,钻柱的底部会卷起,直到它产生足够的扭矩来松动,通常是猛烈的。当发生这种情况时,在钻头处发生大的旋转速率尖峰。粘滑倾向于周期性地发生并且可以持续很长一段时间。粘滑的典型RPM响应如图7所示。由于表面的钻柱继续正常旋转,钻井操作员通常不知道这种破坏性现象发生在井下。
此应用的关键测量是对钻头附近转速的精确,高采样率测量。诸如振动抑制ADXRS645之类的陀螺仪非常适合此任务,因为测量与钻柱的任何线性运动分离。当存在高振动和不稳定运动时,从磁力计计算的旋转速率会受到噪声和误差的影响。基于陀螺仪的解决方案可提供转速的瞬时响应,并且不依赖于过零点或其他可能受冲击和振动影响的算法。
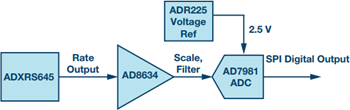
此外,基于陀螺仪的电路比磁通门磁力计解决方案更小,所需的元件更少,磁通门磁力计解决方案需要多个磁力计轴和额外的驱动电路。信号调理集成在ADXRS645中。支持高温IC对陀螺仪模拟输出进行采样和数字化,采用低功耗,低引脚数封装。具有数字输出的175°C额定陀螺仪电路可通过图8所示的简化信号链实现。数据采集电路的完整参考设计可在www.analog.com/cn0365 上获得。
摘要
本文介绍了第一款额定用于高温175°C操作的MEMS陀螺仪-ADXRS645。该传感器可在恶劣环境应用中实现精确的角速率测量,从而抑制冲击和振动的影响。陀螺仪由一系列高温IC支持,以获取处理信号。有关ADI公司高温产品的更多信息,请访问www.analog.com/hightemp。
-
mems
+关注
关注
129文章
4528浏览量
199484
发布评论请先 登录
MEMS陀螺仪系统的精确导航
MEMS陀螺仪中主要噪声源的预测和管理
MEMS陀螺仪中主要噪声源的预测和管理
体声波陀螺仪传感器引发惯性MEMS应用新变革
装配MEMS惯性传感器的实用方法
基于MEMS惯性感测技术的应用变革
地磁传感器与陀螺仪区别是什么
战术导弹对MEMS惯性传感器中的陀螺仪有哪四个要求?

陀螺仪传感器的分类_陀螺仪传感器有什么用
MEMS IMU/陀螺仪对准的基础知识

陀螺仪传感器的应用实例
爱普生(EPSON) 惯性测量单元(IMU)、陀螺仪传感器等模块应用领域选型介绍

MEMS惯性传感器都有哪些种类?MEMS惯性传感器有哪些特点



评论