 Pieter Abbeel发布了一份资源大礼:《深度学习与机器人学》105页PPT
Pieter Abbeel发布了一份资源大礼:《深度学习与机器人学》105页PPT

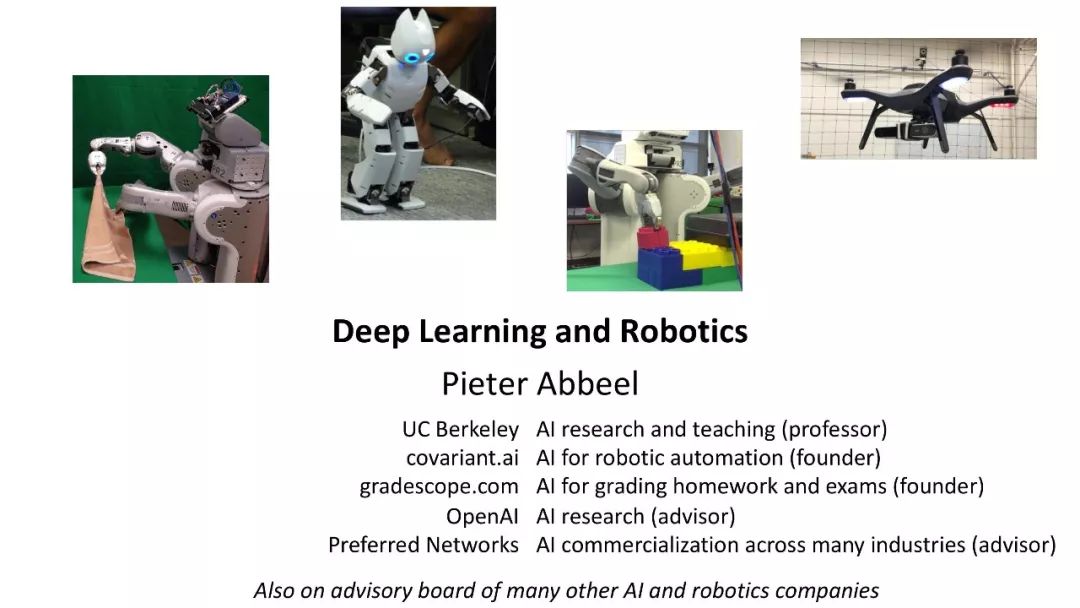
2019年开启之际,美国加州大学伯克利分校教授、机器人与强化学习领域专家 Pieter Abbeel 发布了一份资源大礼:《深度学习与机器人学》105页PPT。这份PPT整理自Abbeel教授2018年受邀参加的69个演讲,内容涵盖监督学习、强化学习和无监督学习的重要进展,以及深度学习的主要应用等方面,有助于读者对深度学习和机器人学有一个宏观的理解。
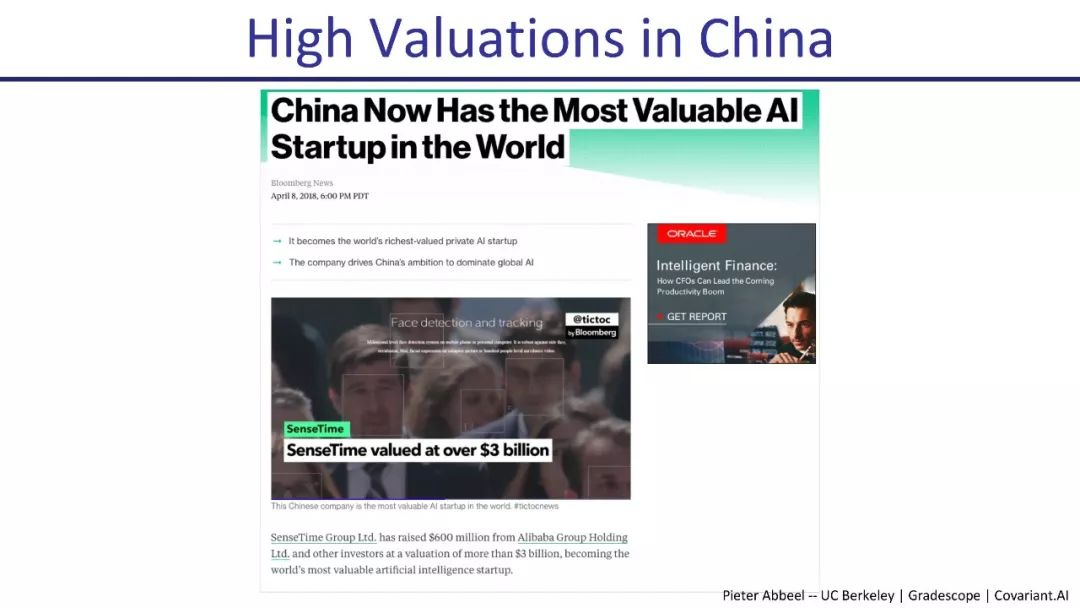
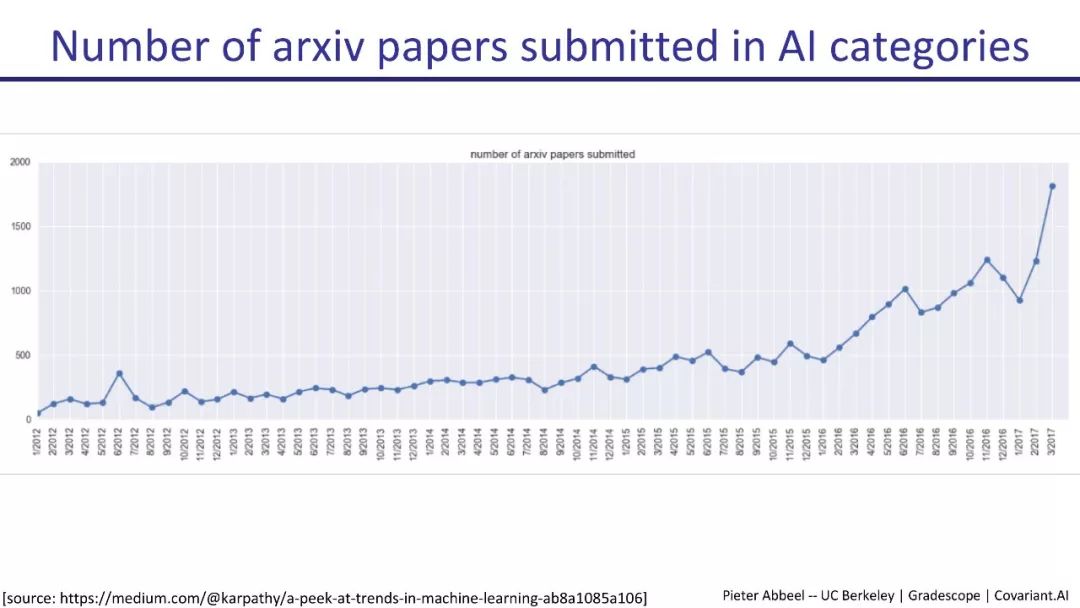
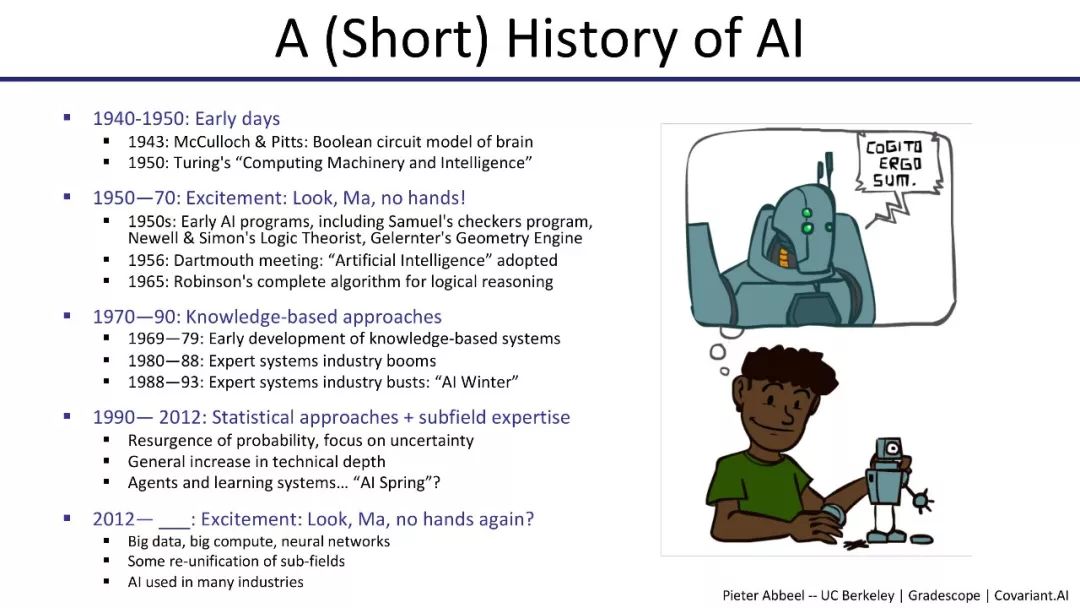
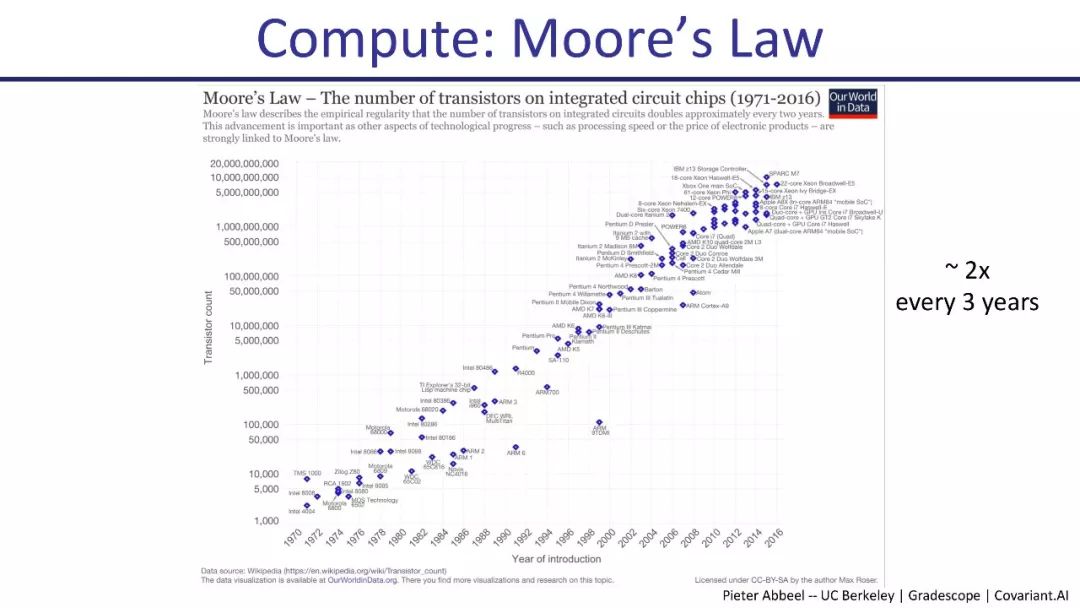
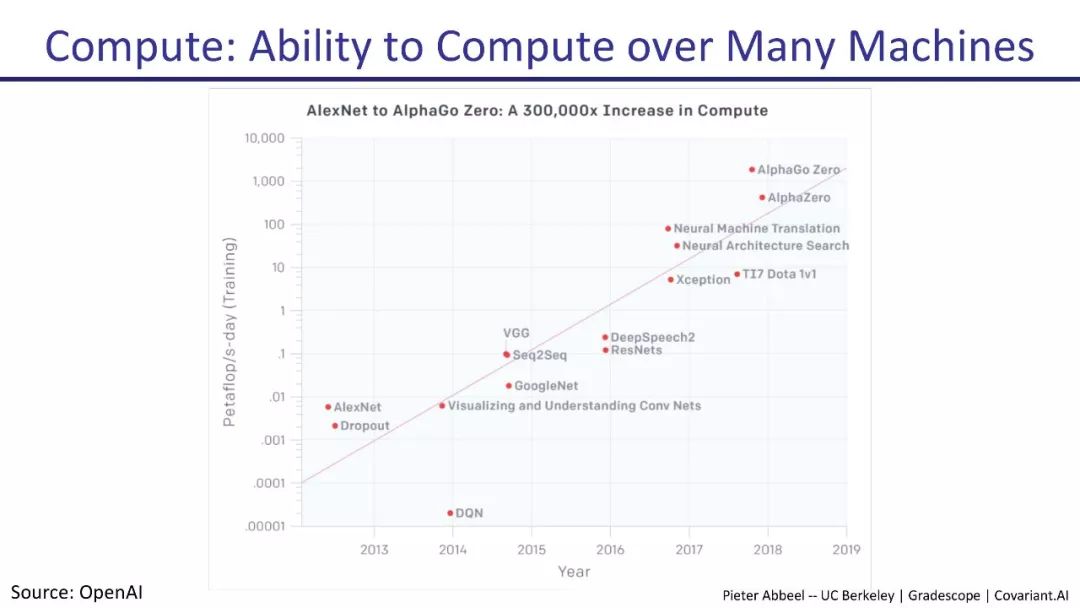
Pieter Abbeel教授从AI近年的一些“热论”讲起,从马斯克认为AI是人类文明面临的最大威胁、普京说“谁能成为AI领域的领袖,谁就将成为世界的主宰者”,概述了近年来AI的热潮:NIPS等顶会的参会人数达到史上最高、arxiv上AI领域的论文翻倍增长。
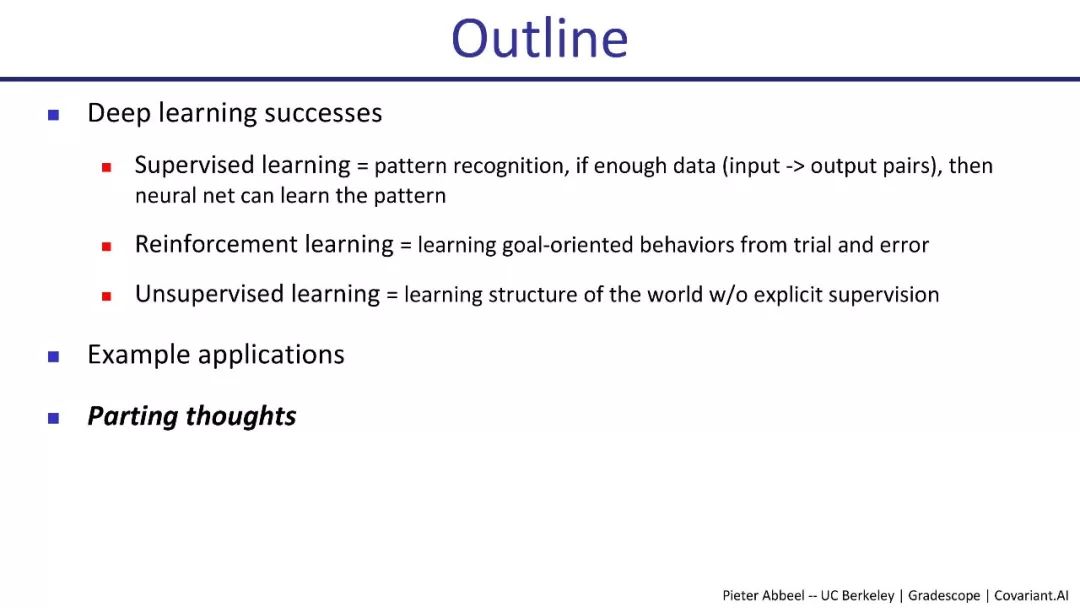
报告的主体部分是“深度学习成功”,详细介绍了监督学习、强化学习和无监督学习的重要进展。Pieter Abbeel教授对这三个概念的解释如下:
监督学习:模式识别,如果有足够多的数据(input -> output pairs),那么神经网络就能够学习模式;
强化学习:通过试错的过程,学习目标导向的行为
无监督学习:没有明确的监督的条件下,学习世界的结构
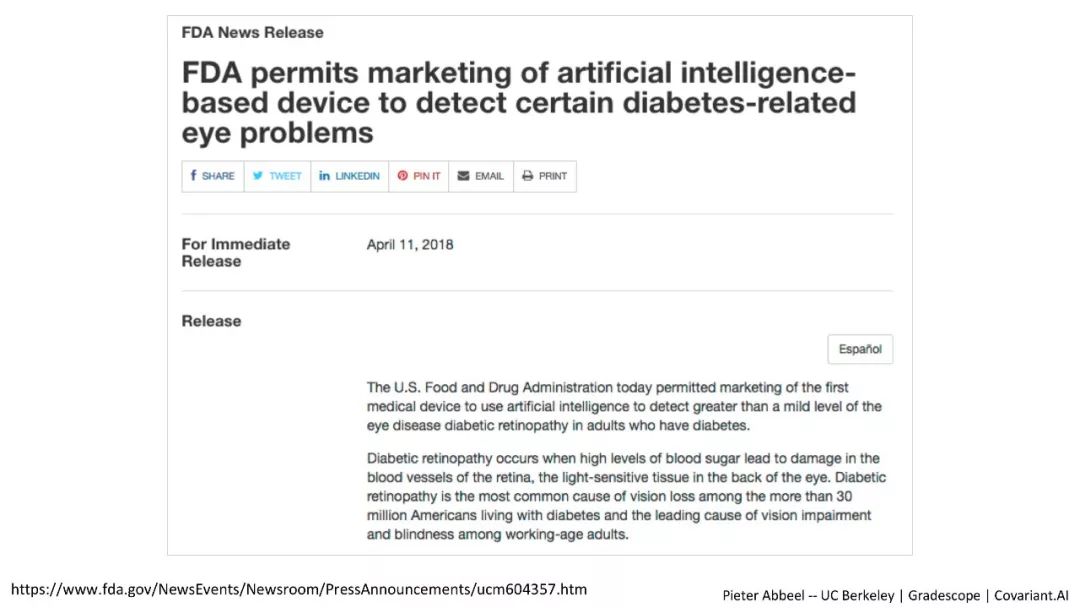
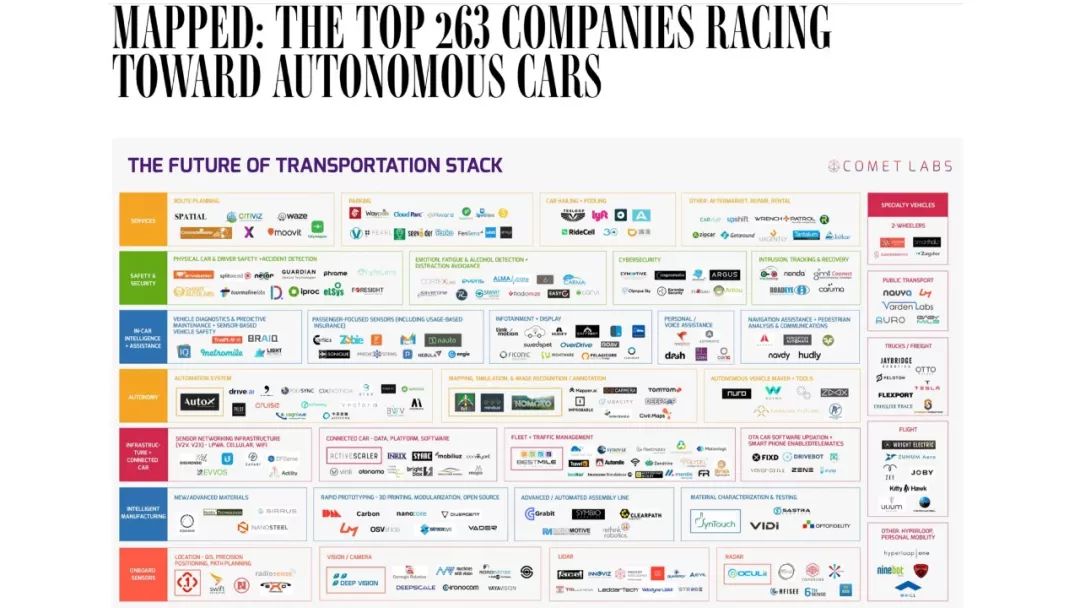
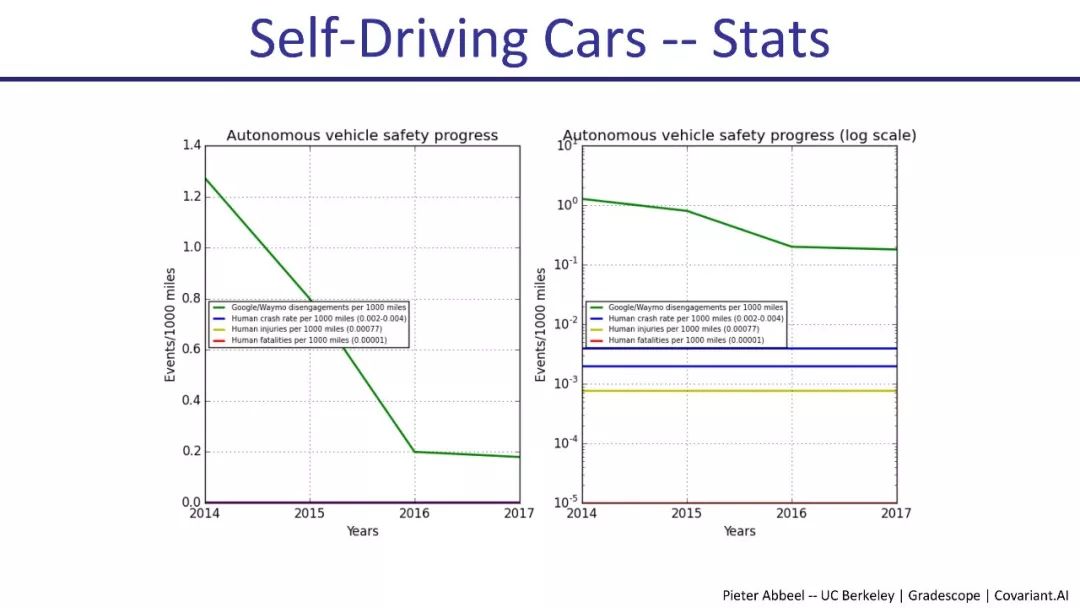
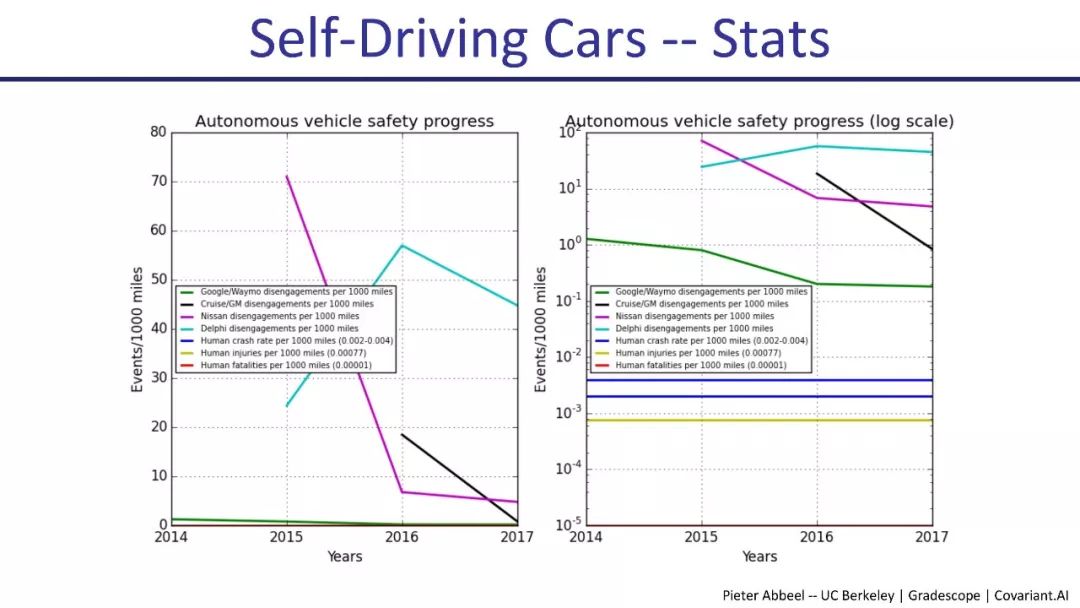
最后,报告展示了深度学习的一系列应用。
PPT下载地址:
https://www.dropbox.com/s/dw4kmxkrv3orujd/2018_12_xx_Abbeel--AI.pdf?dl=0
Pieter Abbeel教授简介

Pieter Abbeel,加州大学伯克利分校教授、机器人学习实验室主任,伯克利人工智能研究(BAIR)实验室联合主任。
Pieter Abbeel是机器人和强化学习领域的大牛。Pieter Abbeel 2008年从斯坦福大学获得博士学位,师从百度前首席科学家 Andrew Ng(吴恩达),毕业后在UC Berkeley任教。
2016~2017年,Pieter Abbeel加入Open AI,任研究科学家。现在则是Open AI顾问。
Pieter Abbeel还是两家AI公司的创始人,Gradescope和covariant.ai。Gradescope开发为家庭作业、课题研究、试卷等打分的AI系统;covariant.ai开发机器人自动化的AI系统,在制造/仓储/电子商务/物流等领域应用。
Pieter Abbeel 的研究重点特别集中于如何让机器人向人类学习(学徒学习),如何让机器人通过自己的试错过程学习(强化学习),以及如何通过从learning-to-learn(元学习)过程中加快技能获取。他开发的机器人已经学会了先进的直升机特技飞行、打结、基本装配、叠衣服、移动、以及基于视觉的机器人操作。
机器人叠毛巾
Pieter Abbeel目前的主要研究方向:机器人和机器学习,特别关注深度强化学习、深度模仿学习、深度无监督学习、元学习、learning-to-learn、以及AI安全。
PPT全文






















-
机器人
+关注
关注
214文章
31700浏览量
224670 -
神经网络
+关注
关注
42文章
4847浏览量
108482 -
深度学习
+关注
关注
73文章
5614浏览量
124809
原文标题:【强化学习干货】《深度学习与机器人学》大牛Pieter Abbeel 105页PPT下载
文章出处:【微信号:AI_era,微信公众号:新智元】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
大象机器人myCobot 320机械臂如何凭实力走进顶尖学府
基于NVIDIA Isaac Lab拓展多模态机器人学习

中兴通讯推动具身智能机器人行业创新发展
探索RISC-V在机器人领域的潜力
NVIDIA神经网络创新研究重塑机器人学习

NVIDIA Isaac Lab 2.3新增功能助力简化机器人学习
NVIDIA开源物理引擎与OpenUSD加速机器人学习
NVIDIA 发布三大利器,推动人形机器人迈向新纪元
英伟达发布机器人 “新大脑”,黄仁勋:人形机器人三年普及
易控智驾与中科院端到端自动驾驶方案入选CoRL 2025

NVIDIA展示机器人领域的研究成果
NVIDIA Isaac Lab可用环境与强化学习脚本使用指南

通过NVIDIA Cosmos模型增强机器人学习




评论