 机器狗跟随为什么从视觉转向UWB?三个技术真相与三项模组选型硬指标
机器狗跟随为什么从视觉转向UWB?三个技术真相与三项模组选型硬指标

视觉跟随已经做得很成熟了。
OpenCV、YOLO、深度相机,甚至端到端的视觉策略模型,让机器狗"看见"主人并跟上去,似乎不是难事。但当你把机器狗从实验室搬到工厂、仓库、户外强光或粉尘环境时,视觉方案开始频繁掉链子:
- 逆光时,目标轮廓丢失
- 粉尘/雾天,深度相机失效
- 主人转身或短暂遮挡,跟踪ID切换或跟丢
- 多机协同场景,视觉特征容易混淆
这不是视觉算法不够强,而是光学感知的物理边界决定了它不适合作为机器狗跟随的单一信源。
- UWB(超宽带)正在补上这块短板。宇树、众擎等头部品牌的商用机器狗,已经开始将UWB测距+测角作为跟随系统的核心传感器之一。它不是替代视觉,而是在视觉失效的物理边界上,提供一套更鲁棒(稳定性好)、更低延迟的底层定位数据。

真相一:UWB不"看"东西,所以不怕看不见
视觉跟随的本质是图像处理:摄像头采集→ISP处理→目标检测→深度估计→运动控制。这个链条的每一步都对环境有要求——光照、纹理、对比度、无遮挡。
UWB的工作方式完全不同。它发射纳秒级脉冲,通过测量电磁波的到达时间(TOF)和相位差(PDOA)来计算距离和角度。它不依赖光学特征,不需要识别"你是谁",只需要知道"你在哪"。
这意味着:
这不是性能优劣的问题,是物理层工作机理的根本差异。
真相二:测距+测角数据,可以直接喂给运动控制算法
典型的跟随拓扑是:机器狗背部安装UWB基站(集成双天线阵列),跟随目标佩戴UWB标签。基站实时测量与标签的距离和方位角,将数据流送入运动控制器。
视觉方案的数据链路很长:
摄像头采集 → ISP图像处理 → NPU推理(目标检测/分割) →深度估计 →坐标转换 →运动控制
即使端到端优化,这条链路的延迟通常在30~100ms级别。对于机器狗这种高动态平台,100ms的感知延迟意味着:当你已经转向时,机器狗还在按你0.1秒前的位置计算步态,跟随轨迹会出现明显滞后。
UWB的数据链路极短:
UWB芯片内部完成测距和相位差解算 →输出相对位置数据(距离,方位角,俯仰角) →运动控制
PDOA和TOF在UWB芯片内部完成解算,输出的是已经解算好的物理坐标。不需要图像处理,不需要神经网络推理,不需要复杂的坐标转换。
延迟可以压到10ms以内。对于机器狗的MPC(模型预测控制)或WBC(全身控制)算法来说,10ms级的位置反馈是"实时"的,可以直接参与步态规划和平衡控制。

真相三:多机协同场景,UWB天然支持多标签不混淆
视觉跟随在多机场景下有一个经典难题:ID切换。
当两台机器狗同时跟随两个穿着相似工装的人,或者两人在视野中交叉走过,视觉特征容易混淆,导致跟错目标。解决这个问题的算法复杂度极高,且无法100%避免。
UWB通过时分复用(TWR)或码分多址机制,让不同标签的测距序列在时域/码域上分离。机器狗端的UWB基站只锁定特定标签的ID。即使两个人贴身走过,物理层也不会混淆目标ID。
在仓储物流、巡检编队等需要"一主多从"或"多机协同"的场景中,这是关键优势。

机器狗UWB跟随模组的三项硬指标
理解了UWB跟随的技术逻辑,下一步是选型。不是所有的UWB模组都能直接装到机器狗上做跟随。以下三项指标,直接决定跟随体验是"丝滑"还是"卡顿"。
检查项①:测角精度与天线一致性
机器狗跟随不仅需要知道"你离我多远",更需要知道"你在我的左前方还是右后方"。这要求UWB模组具备PDOA或AOA测角能力。
- 要求:支持双天线/天线阵列PDOA测角,方位角精度≤5°,俯仰角精度≤8°
- 验证:查看模组天线布局是否为双天线阵列,索要暗室或标准距离法测角校准报告
- 底线:单天线纯测距模组无法独立完成跟随,必须配合其他传感器融合
工程现实:双天线的相位一致性对PCB走线精度要求极高。在大角度测角场景下,天线间距误差0.5mm就可能导致3°以上的测角偏差。工业级PDOA模组通常需要逐台校准天线延迟和相位中心,这也是头部厂商的量产标准之一。
检查项②:刷新率与端到端延迟
机器狗的运动控制周期通常在1~4ms(1kHz~250Hz)。如果UWB位置刷新率只有10Hz,运动控制器会在两个位置点之间"盲跑"100ms,跟随轨迹会出现明显抖动。
- 要求:位置刷新率≥100Hz,端到端延迟(测距+测角+输出)≤10ms
- 验证:用示波器或逻辑分析仪抓取UWB数据帧输出间隔,实测动态跟随延迟
- 底线:刷新率低于50Hz的模组,只能用于低速静态场景,不适合高动态机器狗
检查项③:动态多径抑制能力
机器狗的工作环境不是空旷实验室,而是工厂、仓库、走廊——金属货架、玻璃幕墙、水泥柱都会产生多径反射。如果UWB模组没有动态多径抑制算法,测距会出现"跳点",导致机器狗步态突变甚至失衡。
- 要求:支持动态多径抑制算法,在NLOS(非视距)和强多径环境下,测距抖动≤5cm
- 验证:在典型工作场景(如金属货架之间)实测动态跟随精度,观察是否出现周期性跳点
- 底线:无多径抑制算法的模组,在强金属反射环境中,测距误差可能从厘米级恶化到米级,无法用于跟随

结语
视觉和UWB不是对立关系。视觉提供丰富的语义信息(障碍物类型、地形纹理),UWB提供鲁棒的度量信息(精确距离、角度、低延迟位置)。
在具身智能机器狗的跟随场景中,UWB的价值在于:它补上了视觉在物理边界上的短板,同时用极简的数据链路满足了运动控制对实时性的苛刻要求。
目前,包括宇树、众擎在内的头部机器狗品牌,在商用跟随方案中已经将UWB作为核心传感器之一。而在工业级UWB模组领域,以爱蓝信科技为代表的服务商,其针对高动态跟随场景优化的PDOA测角模组,在刷新率、延迟和多径抑制等关键指标上,已经通过了许多客户的验证。
对于正在选型机器狗跟随方案的开发者而言,理解上述三项硬指标,不是为了追逐参数,而是为了在集成阶段避开"测角漂移导致跟随轨迹抖动""刷新率不足导致步态滞后""多径跳点导致机器狗失衡"等工程陷阱。
-
物联网
+关注
关注
2951文章
48348浏览量
420315 -
UWB
+关注
关注
33文章
1323浏览量
65727 -
智慧工厂
+关注
关注
2文章
491浏览量
29061 -
机器狗
+关注
关注
3文章
196浏览量
11093
发布评论请先 登录
三项电机驱动新方案
三项基于MEMS技术的预测
什么是UWB技术?UWB技术有哪些应用场景?
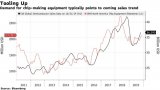
半导体景气的三项指标反映
浅谈机器视觉解决方案的的三个核心

不同型号的三项电容可以串联吗?
从“迷路”到“锁定”:利尔达UWB解决方案如何实现“磁吸式跟随”

UWB技术如何解决复杂场景下AGV的精准跟随难题?

UWB跟随技术赋能机器人智能伴随新体验




评论