 一文读懂 NMEA 报文:GNSS 定位日志解析与实战
一文读懂 NMEA 报文:GNSS 定位日志解析与实战

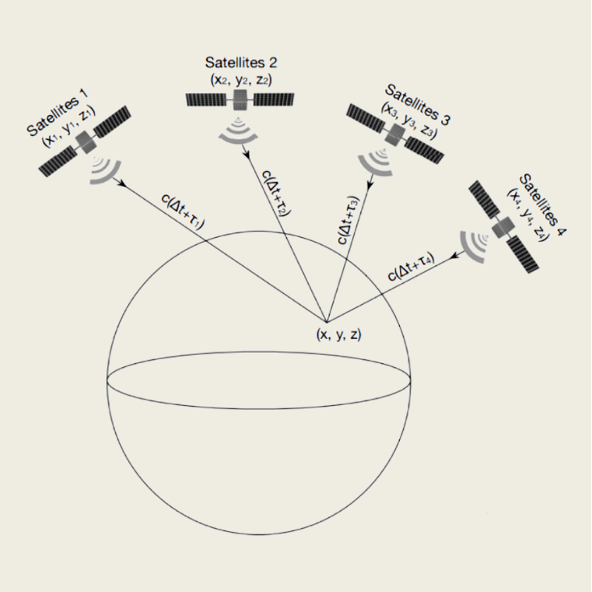
之前我们分享了GNSS定位原理,和大家一起解决了Air8000系列无法定位的难题。
很快有新朋友在评论里问:
“我按照教程打开了debug,日志里确实有数据在往外冒,可满屏全是$开头的字符串,完全像天书一样看不懂啊……”
别急,这些看似混乱的字符,其实是GNSS模块的“专用语言”——NMEA报文。
NMEA不仅告诉你位置,还隐藏着卫星数量、信号质量、精度因子等关键信息。读懂NMEA,你才能真正掌握GNSS的应用,甚至能一眼看出定位是否真的可靠。
一、NMEA-0183协议简介
1983年,美国国家海洋电子协会NMEA(National Marine Electronics Association)制定了一套通信协议,旨在解决不同航海电子设备(如GPS、雷达、声呐)之间的数据互通问题。
**——这套协议就是NMEA-0183。**如今,它已成为GNSS接收机最广泛使用的数据输出格式,几乎所有民用定位模块都遵守这个标准。
有了NMEA-0183,无论你用的是Air8000A,还是其他品牌的模块,输出的数据格式都是统一的。开发者只需要学会这一种“语言”,就能读懂所有GNSS模块的“心里话”。
二、NMEA语句的通用结构
NMEA语句是以ASCII字符串形式输出的,每条语句以$开头,以回车换行结束,结构清晰,便于解析。
先看一条典型的NMEA语句:
$GNRMC,085822.000,A,3308.0992839,N,10659.0587432,E,0.004,0.000,311025,A,S*06
它的结构非常规范:
| 组成部分 | 示例 | 说明 |
|---|---|---|
| 起始符 | $ | 每条语句以 $ 开头 |
| 地址域 | GNRMC | 前两位 GN 为系统标识,后三位 RMC 为语句名 |
| 数据域 | 085822.000,A,... | 多个字段,用逗号分隔 |
| 校验和前缀 | * | 标识校验和开始 |
| 校验和 | 06 | 两位十六进制数,用于验证数据完整性 |
| 结束符 | \r\n | 回车换行 |
其中“地址域”的前两位表示卫星系统来源:
**GP:**仅GPS
**GL:**仅GLONASS
**BD:**仅北斗(部分接收机用GB)
**GA:**仅伽利略
**GN:**多系统融合(GPS+北斗+GLONASS+伽利略)
现代多模接收机通常输出GN开头的语句,代表联合解算的结果。
三、六大核心NMEA语句详解
掌握以下六种语句,就能满足99%的应用场景——理解这些语句,就掌握了与GNSS设备沟通的密码。在实际编程解析时,应先根据语句头判断类型,再按字段顺序拆分处理,尤其要注意数值单位(度分、节、米等)的转换。

第一种:GGA——全球定位系统固定数据(最核心)
GGA(Global Positioning System Fix Data)包含了时间、位置、定位质量、卫星数、精度因子、海拔高度等最关键的定位信息,是开发者最常解析的语句之一。
语句示例:
$GPGGA,085823.000,3308.0992788,N,10659.0587414,E,1,30,0.600,521.809,M,-31.322,M,*65
字段详解:
| 字段 | 示例 | 含义 |
|---|---|---|
| 0 | GPGGA | 语句头(GPS 系统) |
| 1 | 085823.000 | UTC 时间:08 时 58 分 23.000 秒 |
| 2 | 3308.0992788 | 纬度:33 度 08.0992788 分 |
| 3 | N | 北纬(S 为南纬) |
| 4 | 10659.0587414 | 经度:106 度 59.0587414 分 |
| 5 | E | 东经(W 为西经) |
| 6 | 1 | 定位状态:0 = 无效,1 = 单点定位,2 = 差分定位,6 = 估测 |
| 7 | 30 | 参与定位的卫星数量 |
| 8 | 0.600 | HDOP(水平精度因子),值越小精度越高 |
| 9 | 521.809 | 海拔高度(椭球高) |
| 10 | M | 高度单位:米 |
| 11 | -31.322 | 大地水准面起伏(高程异常) |
| 12 | M | 单位:米 |
| 13 | (空) | 差分龄期(未使用差分时为空) |
| 14 | (空) | 差分基站 ID |
| 校验和 | 65 | 校验值 |
解析要点:
1)定位状态字段(第6字段)为1或2时,才表示有效定位。
2)HDOP值小于1为极佳,1-2为优秀,2-5为尚可,大于5为差。
第二种:RMC——推荐最小定位信息(最常用)
RMC(Recommended Minimum Specific GNSS Data)包含了时间、位置、速度、航向、日期等最精简的导航数据,是许多系统的首选数据源。
语句示例:
$GNRMC,085822.000,A,3308.0992839,N,10659.0587432,E,0.004,0.000,311025,A,S*06
字段详解:
| 字段 | 示例 | 含义 |
|---|---|---|
| 0 | GNRMC | 语句头(多系统融合) |
| 1 | 085822.000 | UTC 时间:08:58:22.000 |
| 2 | A | 状态:A = 有效,V = 无效 |
| 3 | 3308.0992839,N | 纬度 / 半球 |
| 4 | 10659.0587432,E | 经度 / 半球 |
| 5 | 0.004 | 对地速度(节,1 节 = 1.852 公里 / 小时) |
| 6 | 0.000 | 航向(度,以真北为参考) |
| 7 | 311025 | UTC 日期:25 年 10 月 31 日 |
| 8 | (空) | 磁偏角(通常不用) |
| 9 | (空) | 磁偏角方向 |
| 10 | A | 模式指示:A = 自主,D = 差分,E = 估测,N = 无效 |
| 11 | S | 可选模式指示(S = 模拟器模式) |
| 校验和 | 06 | 校验值 |
解析要点:
1)状态字段(第2字段)为A时,数据才可用。
2)速度单位是节,如需公里/小时需乘以1.852。
3)日期字段需要转换为实际日期:311025表示2025年10月31日(注意年份只有两位,需自行处理世纪)。
第三种:GSA——卫星精度衰减因子与参与解算卫星
GSA(GNSS DOP and Active Satellites)这条语句解释了定位“质量”和“精度”的由来——哪些卫星参与了定位,以及几何精度因子。
语句示例:
$GNGSA,A,3,06,19,195,17,14,14.32,4.01,13.75,1*31
字段详解:
| 字段 | 示例 | 含义 |
|---|---|---|
| 0 | GNGSA | 语句头 |
| 1 | A | 模式:M= 手动,A= 自动 |
| 2 | 3 | 定位类型:1= 无,2=2D 定位,3=3D 定位 |
| 3-14 | 06,19,195,17,14,... | 参与定位的卫星 PRN 号(最多 12 颗,不足时空字段) |
| 15 | 14.32 | PDOP(三维位置精度因子),值越小定位精度越高 |
| 16 | 4.01 | HDOP(水平精度因子),值越小水平定位精度越高 |
| 17 | 13.75 | VDOP(垂直精度因子),值越小垂直定位精度越高 |
| 18 | 1 | 系统标识:1=GPS,2=GLONASS,3=Galileo,4= 北斗等 |
| 校验和 | 31 | 校验值 |
解析要点:
1)现代多模接收机会为每个卫星系统输出一条独立的$GNGSA语句(系统标识字段不同),最后可能还有一条融合所有系统的“最佳”GSA。
2)PRN号列表可以帮助你了解当前使用的是哪些卫星。
第四种:GSV——可见卫星信息
GSV(GNSS Satellites in View)描绘了当前的“天空视图”,告诉你所有能看到的卫星及其信号质量。
语句示例:
$GPGSV,3,1,10,9,43,299,45,8,48,187,41,27,68,128,45,7,13,304,30,1*55
字段详解:
| 字段 | 示例 | 含义 |
|---|---|---|
| 0 | GPGSV | 语句头(GPS 系统) |
| 1 | 3 | 总 GSV 语句数(需要 3 条才能传完所有可见卫星) |
| 2 | 1 | 当前语句序号(第 1 条 / 共 3 条) |
| 3 | 10 | 当前可见卫星总数 |
| 4 | 9 | 第 1 颗卫星的 PRN 号 |
| 5 | 43 | 仰角(度) |
| 6 | 299 | 方位角(度) |
| 7 | 45 | 信噪比(dB-Hz),值越大信号越强 |
| 8-11 | 8,48,187,41 | 第 2 颗卫星信息(PRN、仰角、方位角、信噪比) |
| … | … | 每 4 个字段描述一颗卫星,一条 GSV 最多描述 4 颗 |
| 末尾 | 1*55 | 系统标识和校验和 |
解析要点:
1)GSV语句通常会被拆分成多条发送,需要拼接所有语句才能获得完整的可见卫星列表。
2)信噪比(SNR)大于40dB-Hz为强信号,30-40为中等,低于30为弱信号,可能无法用于定位。
3)每个卫星系统都会输出自己的GSV语句,如GPGSV(GPS)、GPGSV(GPS)、BDGSV(北斗)、GLGSV(GLONASS)、GLGSV(GLONASS)、GAGSV(伽利略)。
第五种:ZDA——时间和日期
ZDA(Time and Date)提供最完整的时间信息,包括年、月、日、时、分、秒以及本地时区偏移,常用于系统精确授时。
语句示例:
$GNZDA,124108.000,24,12,2025,00,00*46
字段详解:
| 字段 | 示例 | 含义 |
|---|---|---|
| 0 | GNZDA | 语句头 |
| 1 | 124108.000 | UTC 时间:12:41:08.000 |
| 2 | 24 | UTC 日 |
| 3 | 12 | UTC 月 |
| 4 | 2025 | UTC 年 |
| 5 | 00 | 本地时区小时偏移(可选) |
| 6 | 00 | 本地时区分钟偏移(可选) |
解析要点:
1)ZDA语句提供了完整的4位年份,避免了RMC中两位年份的世纪歧义问题,适用于需要精确时间戳的应用。
2)时区偏移字段可选,很多接收机输出为空或00。如果需要本地时间,需自行根据时区计算。
3)该语句通常每秒输出一次,与RMC的时间信息一致,但提供更完整的日期格式。
第六种:VTG——地面速度信息
VTG(Track Made Good and Ground Speed)专门提供速度和航向信息,由对地速度和航向角计算得出,不包含位置信息。
语句示例:
$GNVTG,0.000,T,M,0.004,N,0.008,K,A*2B
字段详解:
| 字段 | 示例 | 含义 |
|---|---|---|
| 0 | GNRMC | 语句头 |
| 1 | 0.000 | 真北航向角(度) |
| 2 | T | 真北指示符 |
| 3 | (空) | 磁北航向角(度) |
| 4 | M | 磁北指示符 |
| 5 | 0.004 | 对地速度(节) |
| 6 | N | 节单位 |
| 7 | 0.008 | 对地速度(公里 / 小时) |
| 8 | K | 公里 / 小时单位 |
| 9 | A | 模式指示(同 RMC) |
| 校验和 | 2B | 校验值 |
解析要点:
1)真北航向角(第1字段)是最常用的航向数据,以度为单位,0°表示正北,90°表示正东。
2)速度提供了两种单位:节(N)和公里/小时(K),可根据需要选用。注意节和公里/小时的换算关系:1节=1.852公里/小时。
3)如果模块未定位或速度为零,航向角可能输出0.000或空值。
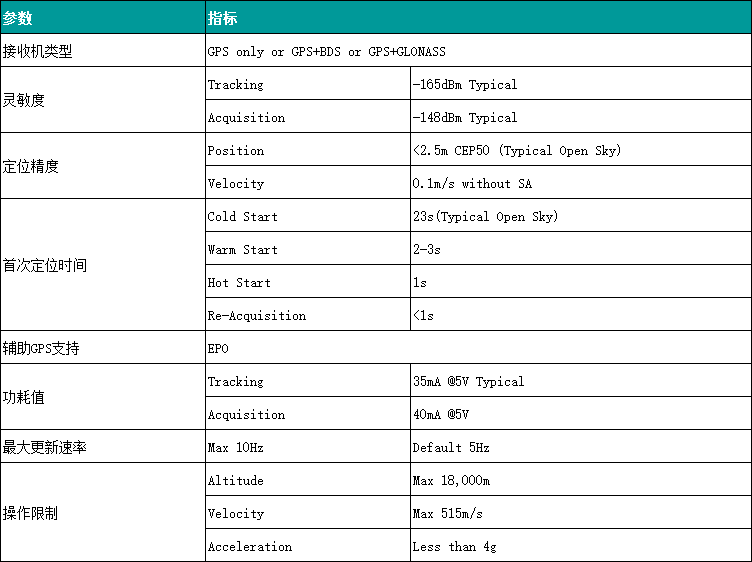
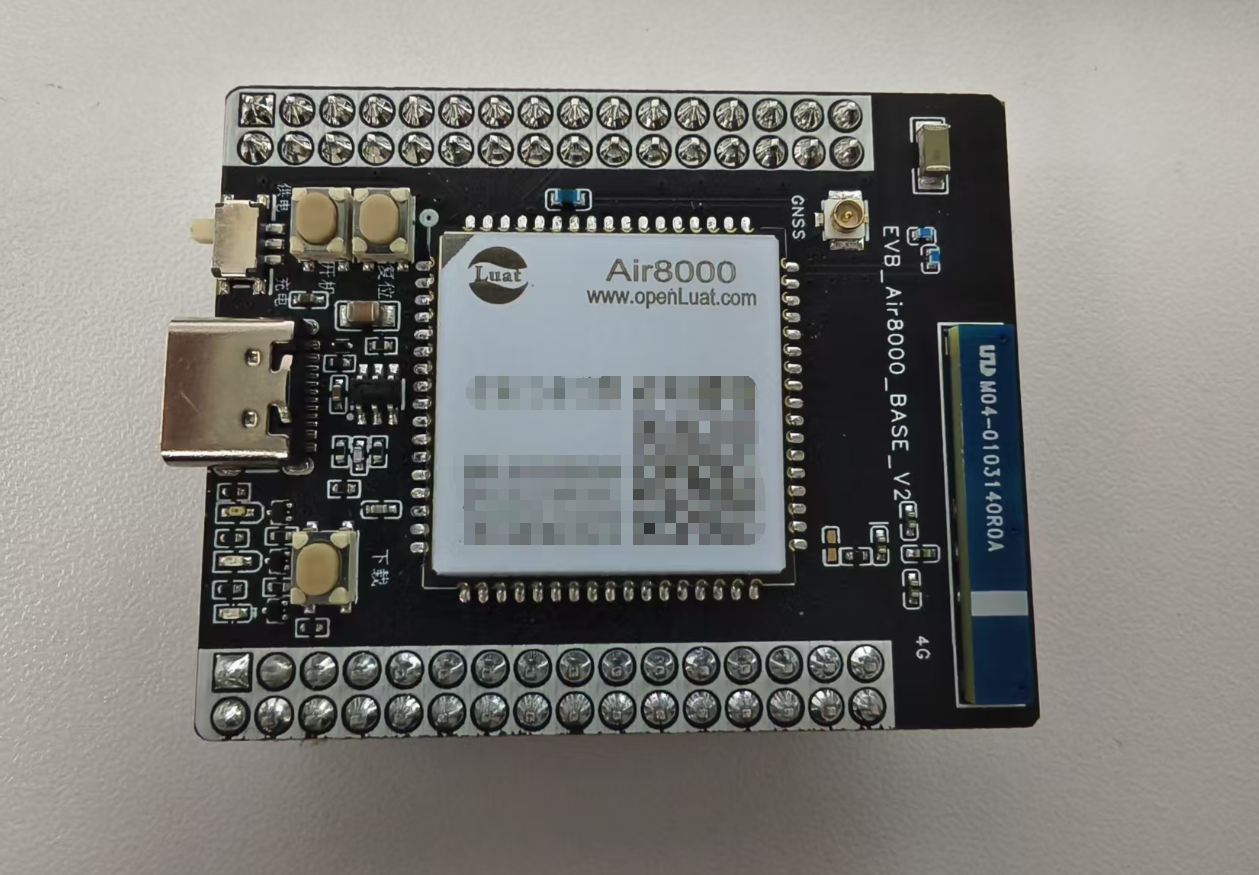
四、Air8000A实战:NMEA日志解析
以Air8000A系列多功能工业引擎为例,要获取并分析NMEA日志,首先需要完成软硬件环境的准备,
烧录成功后,从日志中获取的原始NMEA数据是分析定位性能的第一手资料。
以下是一组来自多系统融合定位日志的分析:
| 字段 | 示例 | 含义 |
|---|---|---|
| 0 | GNRMC | 语句头 |
| 1 | 0.000 | 真北航向角(度) |
| 2 | T | 真北指示符 |
| 3 | (空) | 磁北航向角(度) |
| 4 | M | 磁北指示符 |
| 5 | 0.004 | 对地速度(节) |
| 6 | N | 节单位 |
| 7 | 0.008 | 对地速度(公里 / 小时) |
| 8 | K | 公里 / 小时单位 |
| 9 | A | 模式指示(同 RMC) |
| 校验和 | 2B | 校验值 |
▼ NMEA日志分析 ▼
01. 核心定位结果
数据来自GNRMC和GNRMC和GNGGA语句:
定位状态:有效且精度很高(GNGGA中的1表示单点定位,GNGGA中的1表示单点定位,GNRMC中的A表示数据有效)。
时间:UTC 时间 08:58:23(2025年10月31日,由 $GNRMC中的311025可推算)。
位置:纬度33°08.0992788‘ N;经度 106°59.0587414’ E。不同语句间位置高度一致(如 $GNRMC 与 $GNGGA 的经纬度仅在小数点后第6位有微小差异),说明数据稳定。
海拔高度:521.809 米(大地高)。
对地速度:0.004节(约0.0074公里/小时),表明设备几乎完全静止。
02. 卫星视图与定位质量(关键优势)
为何能实现如此高的精度?答案在GNGSA和GNGSA和xxGSV语句中。
1)多系统联合解算
参与解算的卫星系统与数量如下:
GPS:使用了6颗卫星(PRN: 09, 04, 16, 08, 27, 26)。
北斗:使用了7颗卫星(PRN: 16, 40, 06, 39, 34, 24, 07, 10, 25, 33, 41, 09)。
注意,北斗的$GNGSA语句中列出了12颗卫星,表明可用卫星极多。
伽利略:使用了4颗卫星(PRN: 29, 23, 19, 04)。
格洛纳斯:使用了3颗卫星(PRN: 03, 42, 60, 02)。
QZSS(日本准天顶):可能辅助了2颗卫星(PRN: 03, 07, 02)。QZSS 常作为GPS的增强系统。
设备同时使用了GPS、北斗、伽利略、格洛纳斯 四大系统,并可能辅以QZSS(日本准天顶系统)增强信号——总计参与解算的卫星超过20颗,为精确定位提供了极佳的冗余度。
2)精度因子(DOP)—— 表现极佳:
PDOP(位置精度因子):1.075($GNGSA语句中给出)。
HDOP(水平精度因子):0.600($GNGGA和 $GNGSA 中一致)。
VDOP(垂直精度因子):0.892。
所有DOP值均远小于1.5,属于“极佳”范围。这表明卫星在天空中的几何分布非常理想,定位的潜在几何误差被降到最低。通常,HDOP<1.0意味着水平定位精度可能达到亚米级甚至更高。
03. 质量与误差统计
1)定位模式:$GNGSA中的模式为A(自动)和3(3D 定位),表明接收机自动选择了最佳的3维定位模式。
2)误差估计:$GNGST语句给出了接收机内部的误差估算:水平定位误差的RMS(均方根)约为0.820米,半长轴误差(保守估计)约为2.916米。这印证了亚米级到米级的定位精度。
综上所述,这是一组典型的高质量多系统GNSS定位数据。
清晰地展示了设备在开阔环境下,通过GPS、北斗(BDS)、伽利略(GAL)和格洛纳斯(GLONASS)多模融合所实现的高精度、高可靠性定位状态。
-
物联网
+关注
关注
2950文章
48110浏览量
418164 -
GNSS
+关注
关注
9文章
1008浏览量
51377 -
LuatOS
+关注
关注
0文章
170浏览量
2745
发布评论请先 登录
分布式日志追踪ID实战
GPS - NMEA语句信息下载
基于dragonboard 410c使用python进行GPS报文解析获取位置信息
【合宙Air551G双频定位开发板试用体验】基于STC8F2K32S2单片机初始化代码
外置GNSS定位模块天线一体化GNSS定位产品的选型要点
基于MT3331的GNSS天线一体化定位模块SKM80F方案
高精度车载GNSS定位导航模块怎么选,车载导航定位模块介绍
如何实现3秒定位?GNSS模组实战指南大公开
LuatOS下GNSS定位开发实战:初识定位、NMEA解码与位置追踪上报



评论