 西门子PLC入门级应用实例:简易机械手控制
西门子PLC入门级应用实例:简易机械手控制

进入正题:
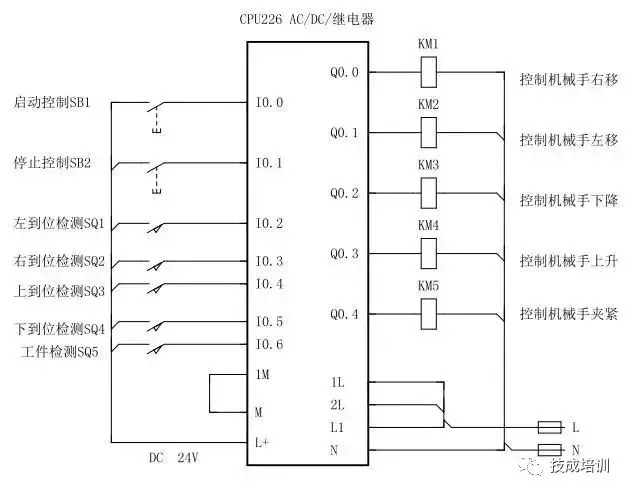
如上图所示,M1为控制机械手左右移动的电动机,M2为控制机械手上下升降的电动机,YV线圈用来控制机械手夹紧防松,SQ1为左到位检测开关,SQ2为右到位检测开关,SQ3为上到位检测开关,SQ4为下到位检测开关 ,SQ5为工件检测开关。
控制要求如下:
1.机械手要将工件从工位A移到工位B处;
2.机械手的初始状态(原点条件)是机械手应停在工位A的上方,SQ1、SQ3均闭合;
3.若原点条件满足且SQ5闭合(工件A处有工件),按下启动按钮,机械手按“原点→下降→夹紧→上升→右移→下降→防松→上升→左移→原点”的步骤工作。
如下图所示:
编程前理顺动作如何转移:
定义符号表:
硬件的接线图:
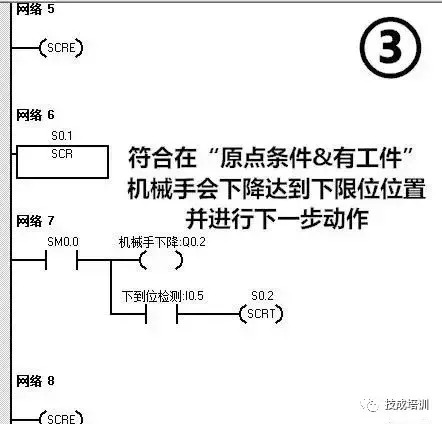
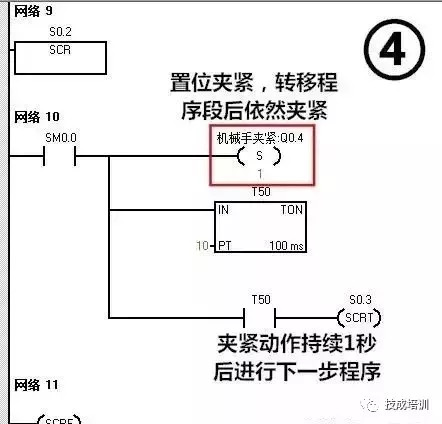
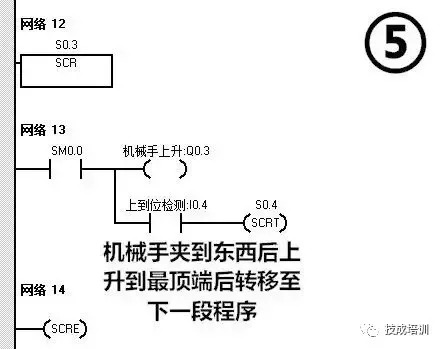
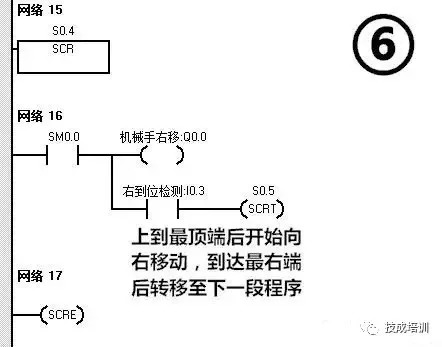
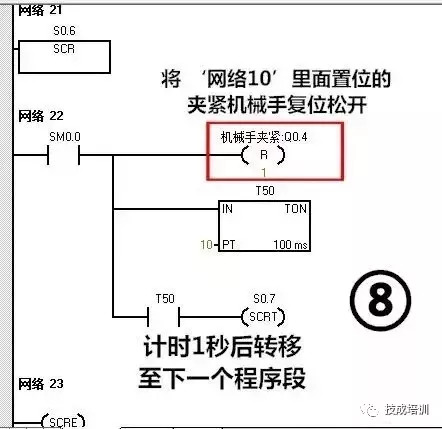
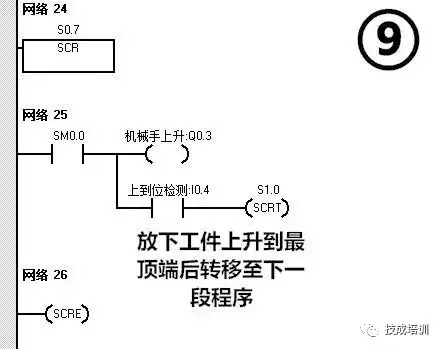
满足所有动作的程序如下:
下面我们一段一段分析这个机械手是如何工作的:

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
plc
+关注
关注
5045文章
14443浏览量
483599 -
西门子
+关注
关注
98文章
3272浏览量
119748
原文标题:西门子PLC应用实例:简易机械手的PLC控制
文章出处:【微信号:indRobot,微信公众号:工业机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
宏集方案 | 如何轻松管理西门子S7 PLC?S7Comm: 与西门子 PLC 直接通信的关键
供多种选择。传统方案:通过OPC服务器与西门子PLC间接通信SIMATICS7系列的PLC是工业可编程控制器,能够实现对生产流程的实时SCADA监控,提供关于设


使用西门子报文控制V90伺服驱动器
西门子的V90伺服驱动器可以通过PROFINET(PN)进行通信,并且通常与SINAMICS V90集成使用的控制器是SIMATIC S7系列PLC。西门子报文(Messages)通常

如何破解三菱PLC与西门子PLC的通讯难题
在工业自动化领域,不同品牌PLC之间的通讯一直是工程师们关注的焦点。三菱PLC与西门子PLC作为市场主流设备,常因协议差异导致数据交互困难。当现场需要将三菱FX系列

工业智能网关可以采集西门子PLC吗
工业智能网关可以采集西门子PLC的数据。物通博联提供全面接入西门子PLC的数据采集解决方案,其工业智能网关支持多种网络制式,可采集各种工业设备数据,包括主流
MCGS触摸屏与西门子S7系列PLC以太网通信
机交互方 式,在工业控制中得到了广泛的应用。笔者在长期的使 用过程中,发现很多人对于不同型号的 PLC 之间,以及 西门子 PLC 与第三方触摸屏的数据通信比较陌生,本文 将以具体

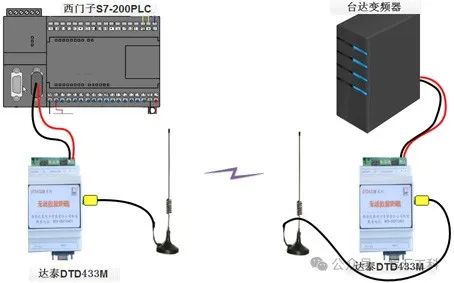
西门子S7-200与变频器之间无线MODBUS通讯实例
案例分析:西门子S7-200与变频器之间无线MODBUS通讯实例 一、引言 在现代工业自动化系统中,PLC(可编程逻辑控制器)与变频器之间的通讯至关重要。
ABB机器人与西门子PLC通讯案例
在现代工业自动化领域中,机器人与可编程逻辑控制器(PLC)之间的通讯是实现高效、精准生产线的关键。ABB机器人与西门子PLC作为行业内的佼佼者,其通讯技术的掌握对于提升生产效率、优化生
PLC边缘计算网关采集西门子PLC数据过程
提供了一种新的解决方案。 PLC边缘计算网关采集西门子PLC数据的过程 (一)确定通信方式 首先,需要确定PLC边缘计算网关与西门子
工业智能网关采集西门子PLC的智能工厂解决方案
场景描述: 某智能工厂的自动化生产线上,使用了西门子S7-1200 PLC来控制生产设备,并通过西门子S7-400实现车间环境的智控;同时部署有污水处理系统,通过S7-200smat
三菱PLC与西门子PLC比较
三菱电机(Mitsubishi Electric)和西门子(Siemens)都是全球知名的自动化和控制系统供应商,它们各自生产的PLC(可编程逻辑控制器)广泛应用于工业自动化领域。 1
Profinet转Profinet网关应用在霍尼韦尔DCS与西门子1500PLC通讯案例
Profinet转Profinet网关在霍尼韦尔DCS与西门子1500PLC通讯中的应用案例

西门子PLC S7-1500系列介绍
西门子PLCS7-1500系列是西门子自动化领域中的一款重要产品,它以其卓越的性能、强大的功能和高度的灵活性,在工业自动化控制系统中占据了一席之地。本文将详细介绍西门子

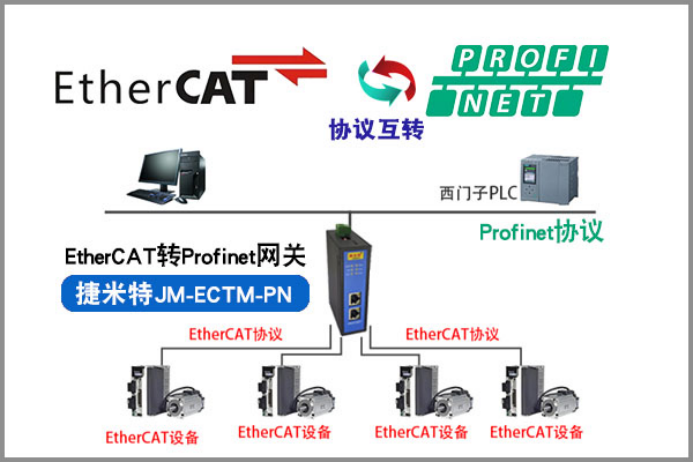
基于 EtherCAT 转 ProfiNet 网关达成西门子 1200 PLC 与伺服电机通讯连接的应用实例
一. 案例背景 西门子1200PLC通过捷米特JM-ECTM-PN(EtherCAT转ProfiNet)网关将松下伺服电机(包括不限于型号MHMFO22D1U2M)或EtherCAT协议的其它设备或





 工商网监
工商网监
评论