 猎豹机器人配备新的算法_没有摄像头也可以躲避障碍物?
猎豹机器人配备新的算法_没有摄像头也可以躲避障碍物?

7月6日消息,据国外媒体报道,麻省理工学院最新发布的新研究视频显示,该学院研制的Cheetah 3猎豹机器人不需要直视而爬上楼梯台阶。视频显示,这个90磅重的机器人配备了新的算法,即使没有摄像头的帮助也可以躲避障碍物,机器人通过触感来适应整个环境并完成任务。
我们之前也看过不少机器人爬楼梯,但往往会使用摄像机取景进行分析,从而完成这一切。Cheetah 3猎豹机器人的团队希望它能够在没有看到前方路径的情况下进行运动,过分依赖摄像头可能会减缓反应,或使其蹒跚而行。“如果它踩到相机看不到的东西怎么办?它会做什么?”麻省理工学院机械工程教授Sangbae Kim在新闻发布会上说道,“这就是盲视运动可以起作用的地方。我们不愿意太过依靠机器人的视觉。”
麻省理工学院在新闻发布会是哪个说,该计划是让机器人能够前往人类无法冒险的地方——比如说进入内部发电厂深入检查。“通过遥控机器人可以更加安全地完成危险,肮脏和困难的工作,”Kim说。但在这种恶劣环境中,机器人可能无法用摄像头进行观察。比如一个机器人进入被毁坏的日本福岛第一核电站内部搜索残留的核燃料时,所携带的相机就被辐射所摧毁。
这就是为什么团队使用算法和传感器来给予机器人本体感受——感知自己的躯体在环境中的位置。机器人的升级包括改善其硬件性能,让它能够伸展和扭曲。其中还引入了新的预测算法,帮助Cheetah 3猎豹机器人改变其步态,防止绊倒或摔倒。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
215文章
31800浏览量
224991 -
算法
+关注
关注
23文章
4819浏览量
98988
原文标题:MIT机器人达成新成就:不依靠视觉也能爬楼梯
文章出处:【微信号:tjrobot,微信公众号:天津机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
机器人超声波避障测距
。
倍加福USI2500-27X13E系列超声波换能器,主打工业级高可靠避障测距,专为复杂机器人作业场景设计。不同于普通民用超声波传感器,该系列产品声场分布均匀、探测盲区小,能够有效识别各类复杂障碍物
发表于 06-10 17:20
基于米尔RK3576核心板的国产割草机器人解决方案
障决策 :利用NPU加速运行轻量化YOLO等国产优化模型,精准识别草坪中的障碍物。
全覆盖路径规划 :利用A72大核运行弓字形覆盖算法、边界回充算法,相比传统随机式机器人,作业效率可提
发表于 04-24 17:31
车内安防 + 车外识别,车载 IPC 摄像头成为出行安全守护者
在智能交通与汽车安全领域,智能车载IPC摄像头正以革新姿态重塑传统监控模式。作为融合视觉识别机器人技术的智能安防核心设备,其功能已突破单一车内安防范畴,形成覆盖车内外环境的立体化感知体系。一、车内安

自动驾驶汽车如何检测石头这样的小障碍物?
的小障碍物,自动驾驶汽车真的要检测吗?如果要检测,是如何检测的? 自动驾驶视觉系统都在看什么? 自动驾驶汽车要“看见”周围环境,是靠一系列传感器来完成的,其中最核心的一个就是摄像头。摄像头采集到实时图像之后,自

自动驾驶既然有双目摄像头了,为什么还要三目摄像头?
[首发于智驾最前沿微信公众号]在自动驾驶领域,纯视觉方案一直受到不少人的认可。双目摄像头由于模拟了人眼的工作方式,能够通过视差计算还原三维信息,在距离判断和空间感知上具有天然优势,因此被广泛应用于纯

CW32L012小型机器人控制评估板活动 四足机器人+智能小车 开箱评测
、功能测试
1、打开小车电源开关,按下KEY2启动小车运行,也可以使用红外遥控器与可以对小车进行控制。
2、进行超声波避障测试,小车也能自动避开障碍
发表于 11-24 23:44
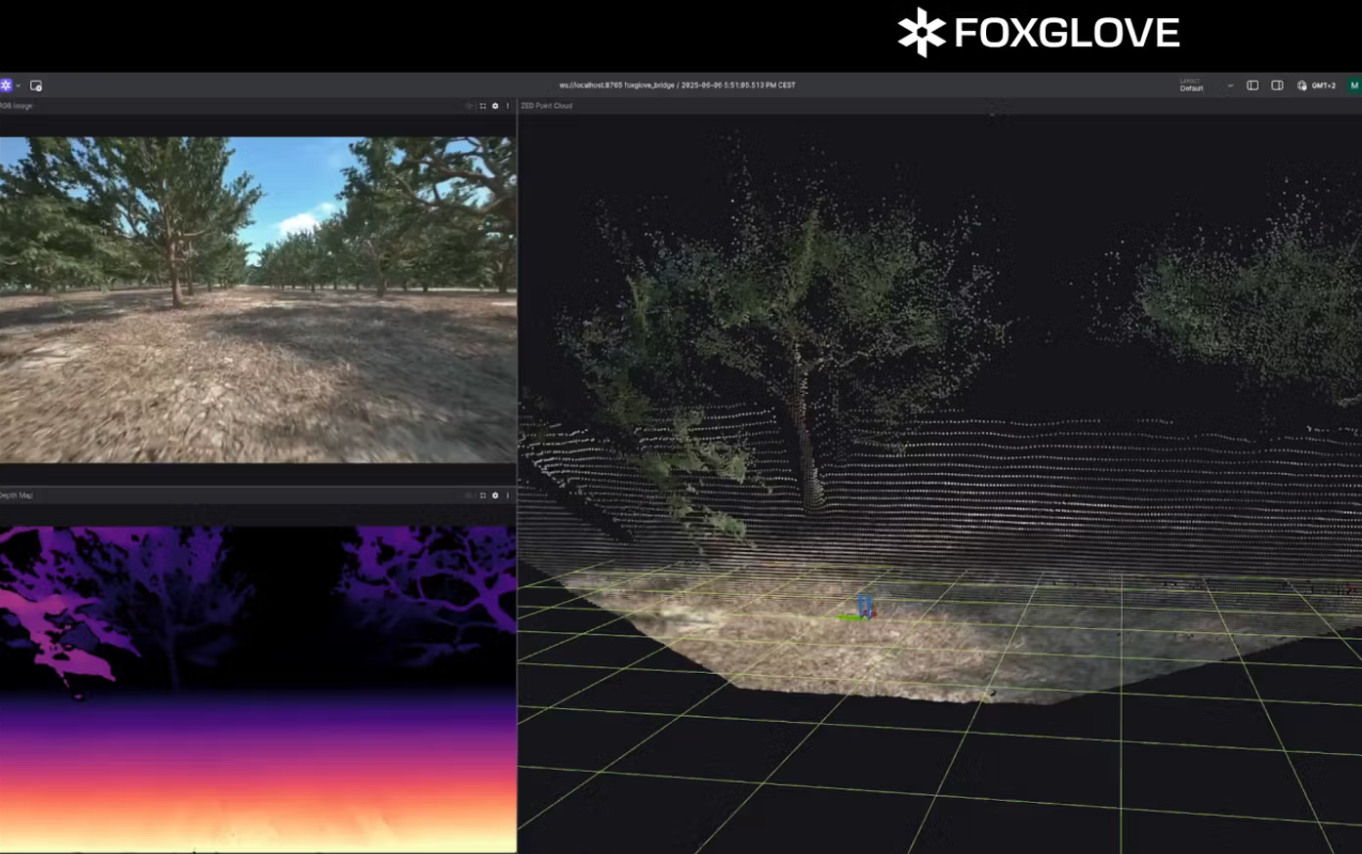
赋能机器人调试:ZED 摄像头与 Foxglove 正式集成
在节奏飞快的机器人领域,清晰直观的可视化功能是加快开发速度、优化调试流程的关键。基于此需求, 友思特合作伙伴 Stereolabs产品 ZED 摄像头及 ZED SDK,已与机器人开发专用平台
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
瑞芯微RK3576 AIoT处理器处理器凭借其卓越的多屏异显与8路摄像头接入能力,为机器人领域带来革新。米尔电子MYD-LR3576开发板实测数据显示,在高负载下CPU占用仅34%,完美实现多路视觉
发表于 10-29 16:41
巡检机器人落地攻略:RK3576驱动12路低延迟视觉
,边走边看、实时回传、异常即告警。周三,机器人上电跑通:前后左右与顶部共 10~12路1080P 摄像头接入,基于米尔 RK3576开发板 完成 硬件编解码 + RTSP/SRT 低延迟推流;端到端延迟
发表于 10-24 16:53
抗辐照MCU在核电站巡检机器人摄像头模组中的应用探讨
摘要 :核电站作为高辐射环境的特殊工业场所,对电子设备的可靠性提出了极高要求。巡检机器人摄像头模组作为核电站设备状态监测的关键部件,其稳定性直接影响巡检任务成败。本文通过以国科安芯推出的抗辐照MCU
当复合机器人碰到障碍物,会触发怎样的智能绕障机制?
决策,实现了在动态环境中的高效,安全运行。那么,当这样一台复合机器人碰到障碍物时,它是如何实现自主绕障的?

360环视技术推荐的硬件平台:支持多摄像头与三屏异显的理想选择
在智能车载系统中,还是机器人视觉平台中,RK3576都能提供坚实的技术支撑。 米尔RK3576核心板资源框图 它在360环视方案中的关键优势包括:✅ 支持多摄像头接入l 板载8路摄像头输入接口,满足
发表于 07-30 17:32



评论