 利用NVIDIA Omniverse Extension开发FreeD定位系统
利用NVIDIA Omniverse Extension开发FreeD定位系统

1什么是 FreeD 定位系统
FreeD 定位系统(通常称为 FreeD 协议)是一种业界广泛应用的摄像机追踪数据通信协议,主要用于虚拟演播室(AR/VR)、电影虚拟制作等实时追踪场景。在很多工业数字软生项目中也有类似接收发送数据协同的需求,可以参考下面的流程作参考。
FreeD 主要传递包括摄像机三维位置(XYZ)、旋转(Pitch、Yaw、Roll)、镜头参数(焦点、变焦)。
我们采取的协议包含 29 个字节的数据,其 FreeD 发送的定位设备一般是一个独立于摄影机的组件,其实现原理大致分为红外定位点,双目摄像头,多摄像头等。包括著名的 Mosys、Redspy、HTC Vive Mars 等。FreeD 是一个通用的定位协议,常见的定位系统默认都支持 FreeD 协议。
2开始开发
首先创建一个插件,命名为omni.freed.livelink。具体步骤可参考:《NVIDIA Omniverse Extension 开发秘籍:Python/C++ 实战,附完整代码》
2.1 背景分析
首先找到 FreeD 的定义文档,并且分析其协议 (https://www.manualsdir.com/manuals/641433/vinten-radamec-free-d.html?download),然后根据协议在 Omniverse Extension 编写接收协议,且实时更新 Omniverse USD 的 Camera,让 Omniverse 的 Camera 跟随外部的相机定位系统实时同步更新,实现数字孪生效果。
*注:文本下面需要用到很多计算机编程开发的基础知识。
2.2 开发解析
2.2.1 端口创建
FreeD 协议基于 UPD 协议传输,一般默认是广播方式,接收的端口是 40000 (可以在相机定位设备里更改端口,或者进行点对点传输)。

_startUPDServe函数里面创建 Socket 端口(或者使用已有框架比如 python-osc)

2.2.2 协议解析
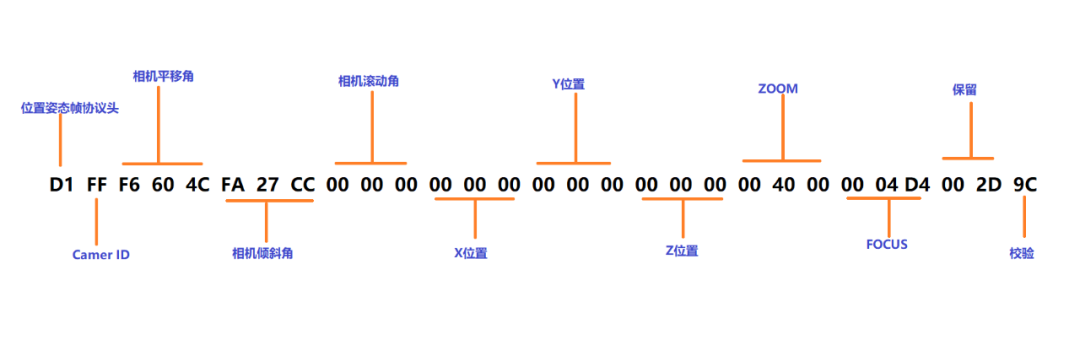
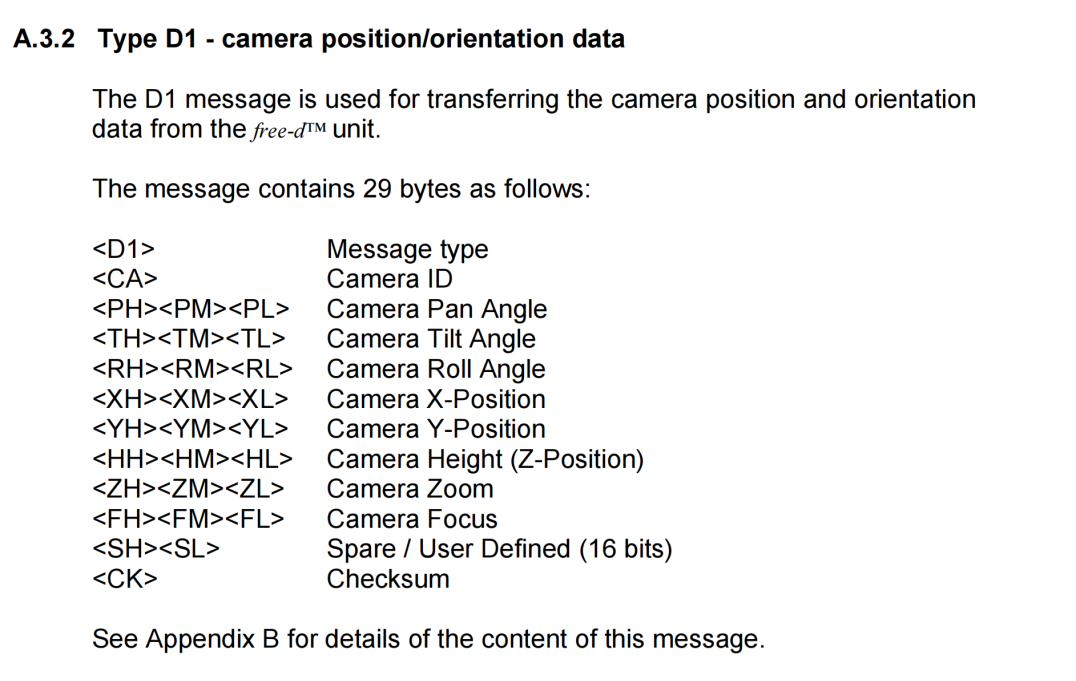
分析 FreeD 的协议,通用 FreeD 采用的是 Type D1 的数据格式,接收 29 个 Bytes。在文档的第 30 页,根据指引“Appendix”去看第 40 页。
FreeD字段说明
再通过下图更直观地表达 FreeD 的 29 个字节所,按照文档计算 Pan, Tilt, Roll 的数值。
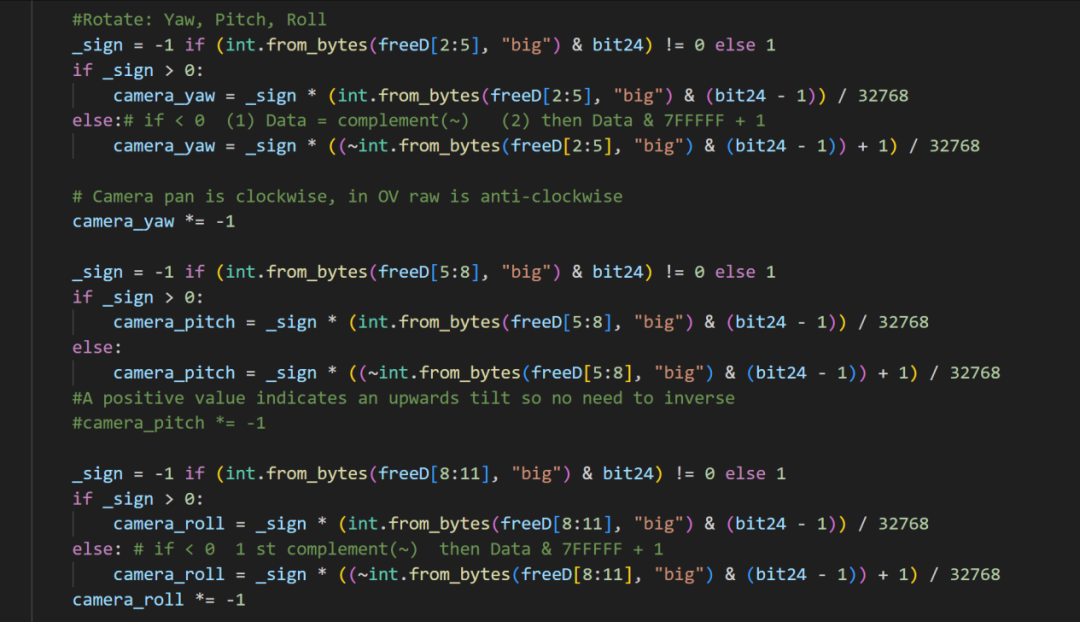
*注:从网络端口传来的数据是大端格式, 并且如果是负数的话则需按照负数补码来解析。
2.2.3计算 Yaw Pitch Roll:
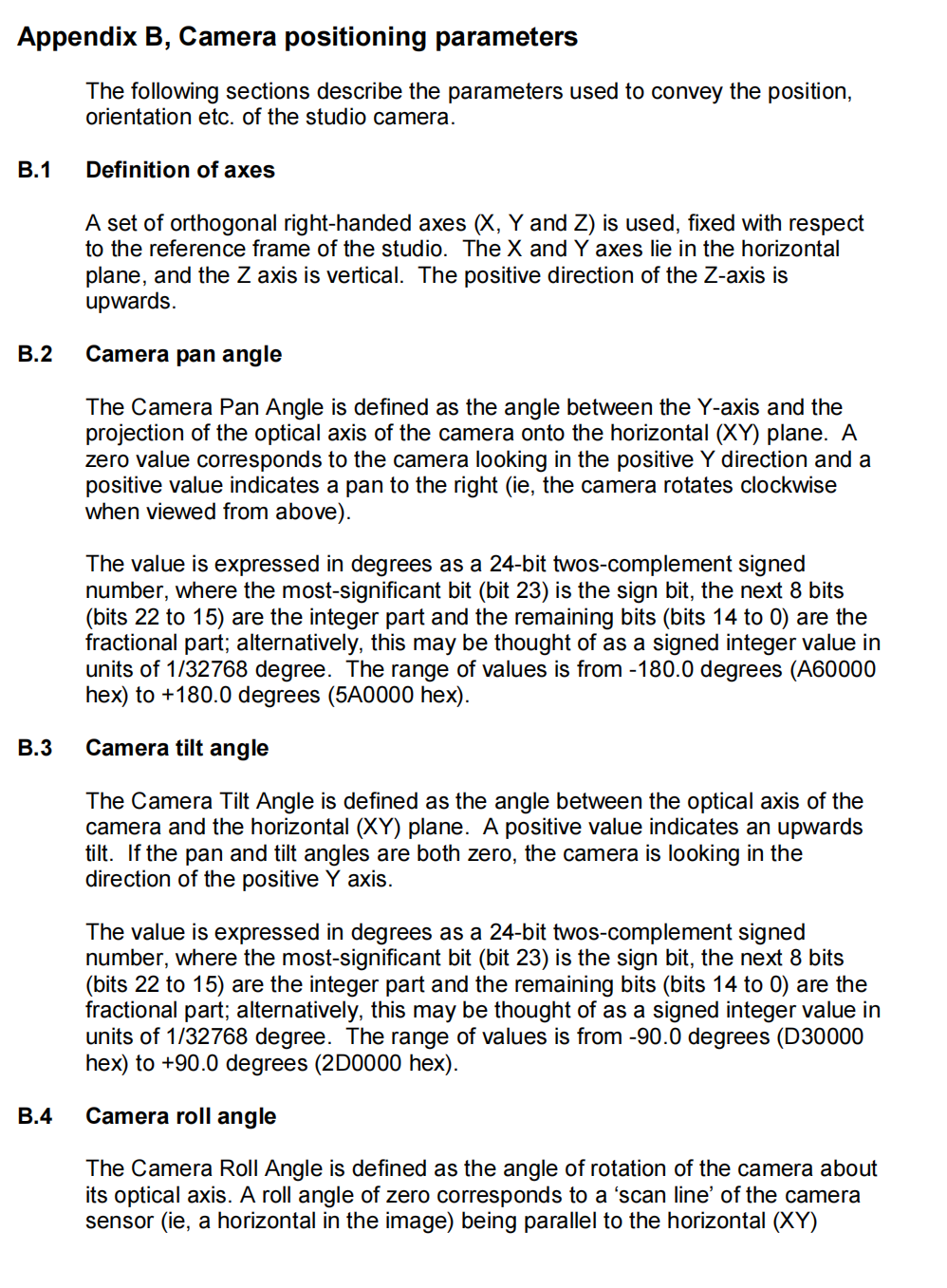
旋转 Pan,Tilt,Roll(Yaw Pitch Roll)的角度定义
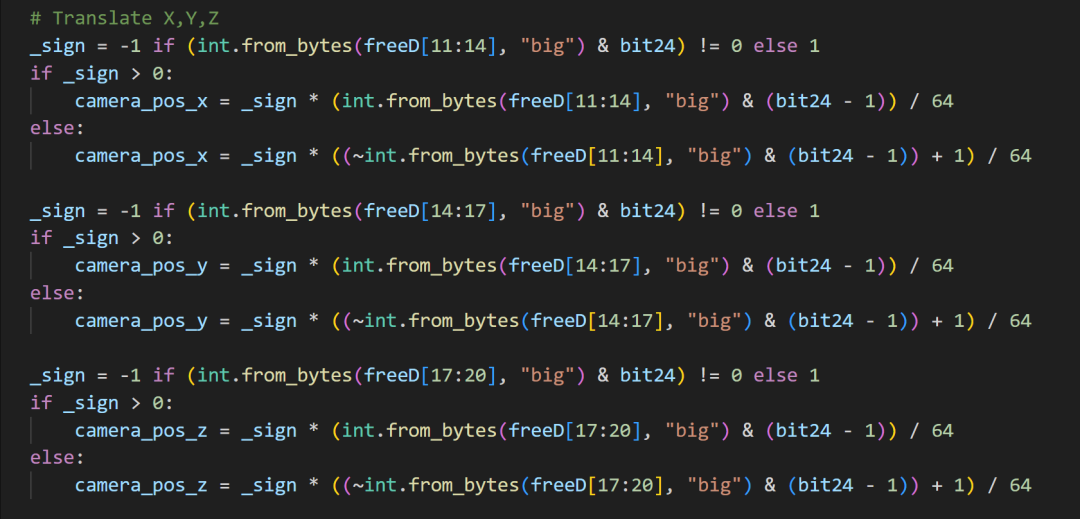
2.2.4计算位置 X, Y, Z:
同理按照文档计算 Translate 的 X Y Z 数据。
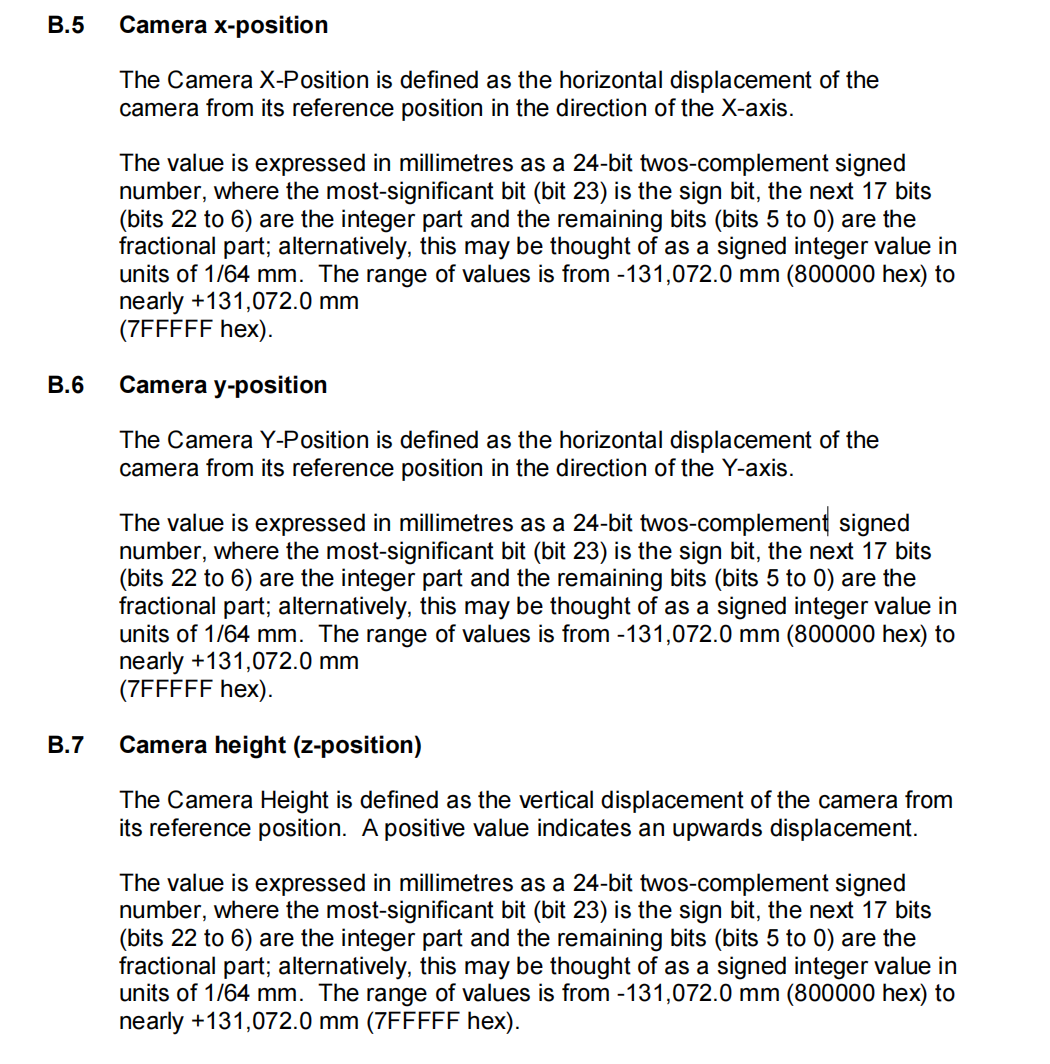
位置信息 X,Y,Z 的定义
按照定义给出代码。
Zoom 和 Focus 和镜头文件相关,由于每一个镜头文件对应的解析都不太一样,这里就不再详细判断。
最后把解析得到的 Yaw Pitch Roll 和 X,Y,Z 的数据更新到我们绑定的 Camera 上面实时更新。
3创建 Event 事件
3.1 发现问题
在子线程运行的时候发现无法对 USD Stage 场景的 Prim 操作,调试发现 USD Prim 都是 None。
这时候可以利用AI帮助,描述清楚问题的前因后果。
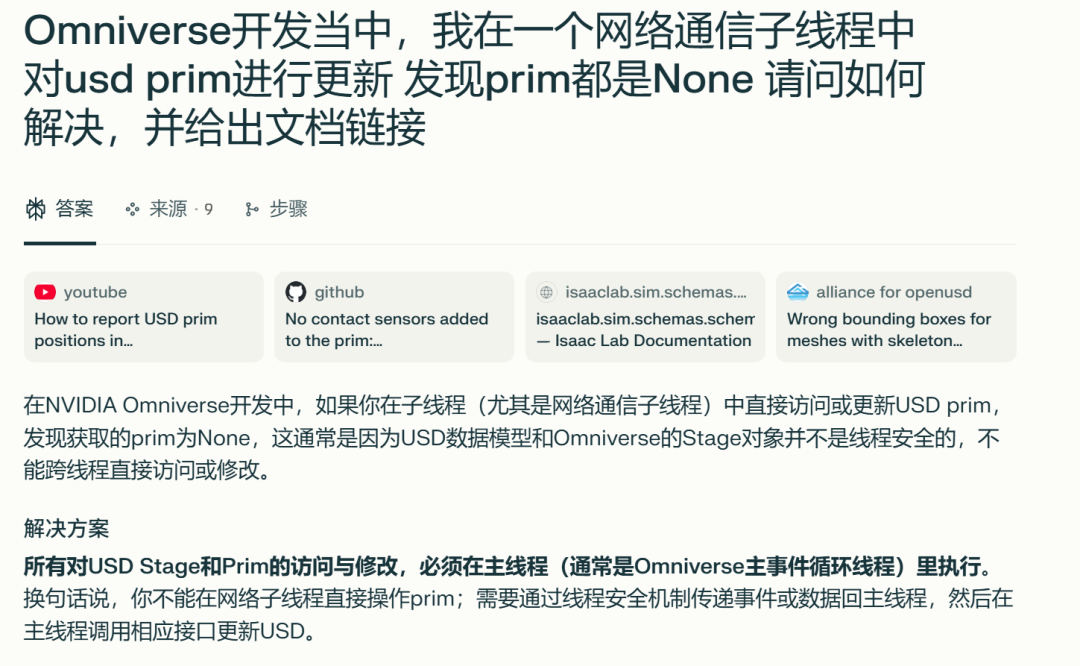
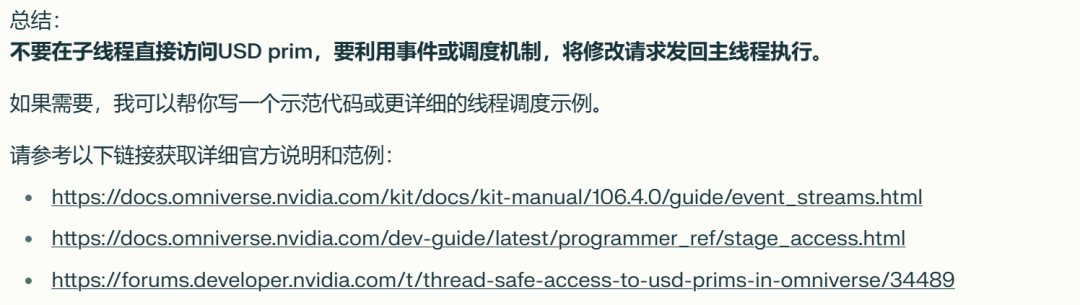
根据上面 AI 给出的提示,原因是 Omniverse 子线程中无法对 Stage 的 USD Prim 进行操作。 此时需要一个注册主线程 Event 事件,在这个 Event 事件中去更新每一个 Prim 的操作。
此后还需考虑以下几件事情:同步性(帧率统一)、设置延时、设置偏移、相机旋转顺序。
3.2 锁定Omniverse渲染帧率
首先锁定渲染的帧率。例如 FPS 锁定在每秒 25 帧,FreeD 的发送帧率也锁定到 25 帧。目的是保证良好的同步性,同时保证 Genlock 的传输接收效果良好。
关闭 Omniverse, 首先找到你对应的 Build 出来的 Composer 对应的.Kit文件,在“..kit107.3\_buildwindows-x86_64 eleaseapps” 里面包含所有配置的信息,用文本打开。
在[settings]下面添加以下字段, 注意是单独的[settings]字段。
app.runLoops.main.rateLimitEnabled = true
app.runLoops.main.rateLimitFrequency = 25
app.runLoops.main.rateLimitUsePrecisionSleep = true
app.runLoops.main.syncToPresent = true
app.runLoops.present.rateLimitEnabled = true
app.runLoops.present.rateLimitFrequency = 25
app.runLoops.present.rateLimitUsePrecisionSleep = true
app.runLoops.rendering_0.rateLimitEnabled = true
app.runLoops.rendering_0.rateLimitFrequency = 25
app.runLoops.rendering_0.rateLimitUsePrecisionSleep = true
app.runLoops.rendering_0.syncToPresent = true
app.runLoops.rendering_1.rateLimitEnabled = true
app.runLoops.rendering_1.rateLimitFrequency = 25
app.runLoops.rendering_1.rateLimitUsePrecisionSleep = true
app.runLoops.rendering_1.syncToPresent = true
app.runLoopsGlobal.syncToPresent = true
app.vsync=true
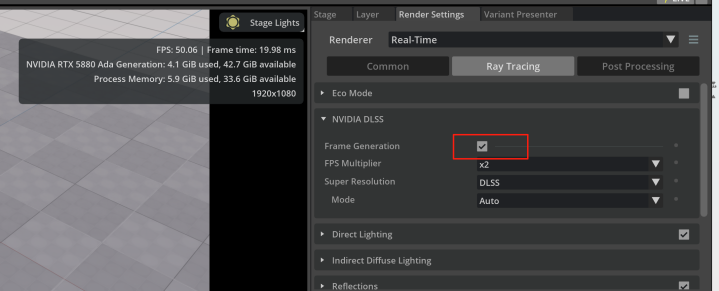
重新打开 Omniverse 的 Composer ,可以看到此时的帧率是 50。原因是我们开启了 DLSS 的 Frame Generation功能。 如果去掉 Frame Generation ,则会显示 25 帧率。
3.3 注册渲染 on_update 事件
要得到渲染事件的事件,需要在每一次渲染 Render 开始的时候取出一帧进行合并。
https://docs.omniverse.nvidia.com/dev-guide/latest/programmer_ref/events.html
Event streams 是以线程安全的方式传递数据,是由 Omniverse 的核心组件 carb 来提供,下面就是每一帧渲染的时候都会调用的函数, 后还需要再on_update函数去处理。
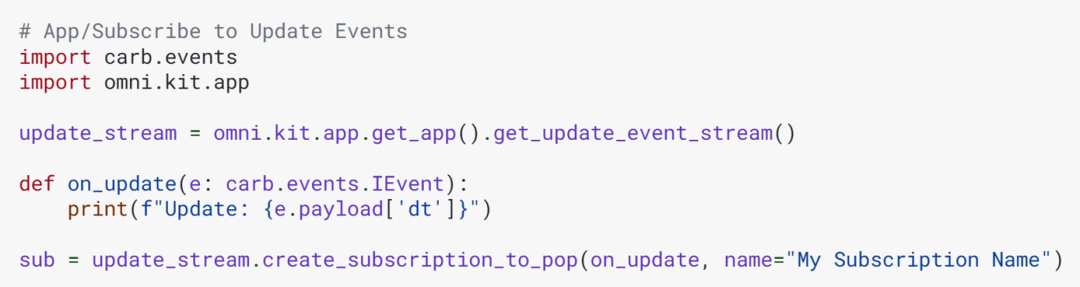
注册 Event:
sub1= update_stream.create_subscription_to_pop(on_update, name="My Subscription Name")
解除注册:需要把这个 sub1 设置为 None (并没有 unsubscription 这个函数)
sub1= None
这里需要注意的是,在实际工程中要注意这个 sub1 的生命周期,不能用一个局部变量去存储注册的 event,否则在出了这个局部函数sub1以后会自动设置为 None,解决办法是用一个成员变量去控制
self._sub= update_stream.create_subscription_to_pop,
然后在不需要的时候设置为 None:
self._sub= None
4相机延迟和定位偏移
4.1 相机延迟
相机延迟:在虚拟拍摄当中,除了相机定位,还有动捕数据,绿幕视频流传输数据,这些数据需要处理的时间比 FreeD 要耗时,所有可能会造成不同步,这就需要给相机定位在本地缓冲增加一些延时,例如可以在程序中开一个 Buffer 来缓冲一下
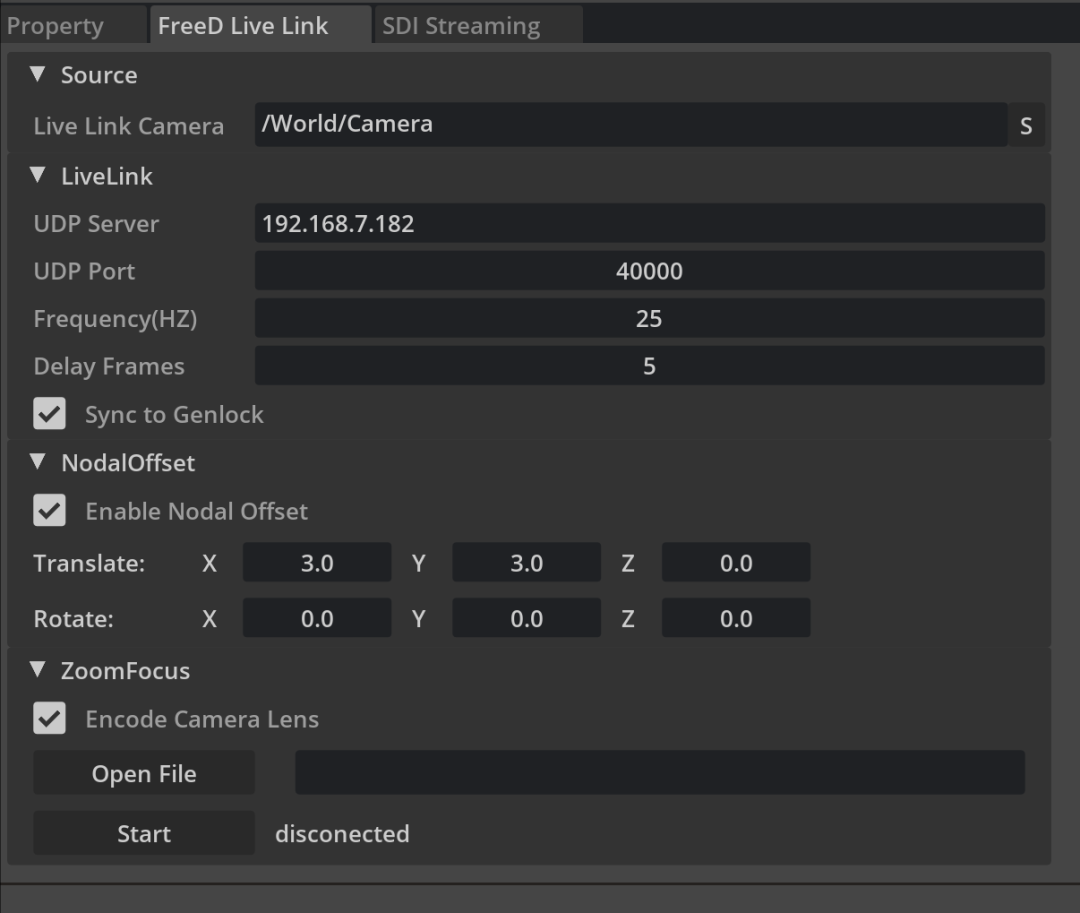
4.2 定位偏移
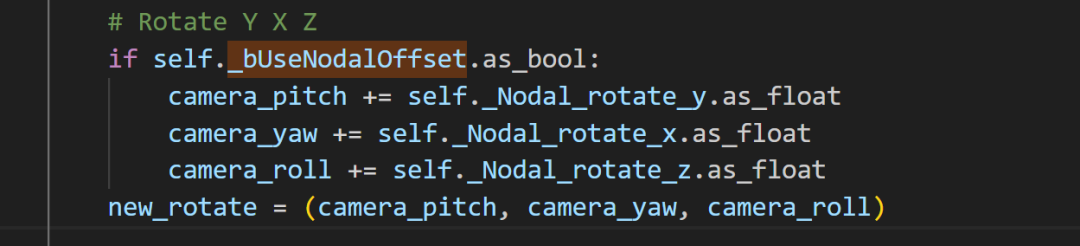
因为定位设备和实际有偏移,所以利用 Nodal offset 来手动添加偏移量。

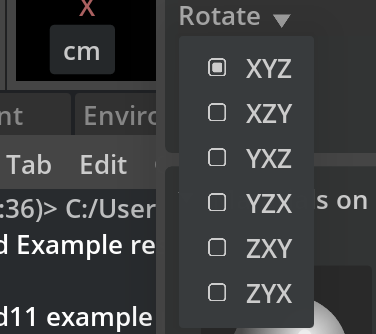
5设置 Camera 旋转顺序
欧拉角的旋转是有顺序的,其本质是因为旋转对应的矩阵乘法不具备交换律。在 Omniverse Rotate 有 6 种方式,我们应该以哪种旋转指定呢?
在 Omniverse 当中,应 Y 轴向上,按照 FreeD 的解析,即 Y, X, Z 的顺序。 我们在 Omniverse 里按照 ZXY 给出旋转顺序的具体原理可以查看知乎中的这篇帖子:https://zhuanlan.zhihu.com/p/85108850
6最终
结合所有的步骤,完成最终所有功能。
iPhone 上面的 JetSet 软件可以发送 FreeD 定位协议,这样我们即可通过上面的思路完整做出一个符合工业标准的插件。
文案&技术支持:
宋毅明 NVIDIA Omniverse & OpenUSD 开发者关系经理
-
通信协议
+关注
关注
28文章
1097浏览量
42357 -
定位系统
+关注
关注
10文章
660浏览量
37697 -
摄像机
+关注
关注
3文章
1790浏览量
63279
原文标题:实战项目拆解!当 FreeD 定位系统遇上 Omniverse Extension
文章出处:【微信号:Leadtek,微信公众号:丽台科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
NVIDIA Omniverse Extension开发秘籍

NVIDIA将NVIDIA Omniverse带给全球超过250万的开发者
用NVIDIA Omniverse连接游戏开发工作流
NVIDIA Omniverse Create最新版功能介绍
NVIDIA Omniverse的特性及应用
利用NVIDIA RTX和Omniverse取得的工作成果
利用 NVIDIA Omniverse 和 Bentley LumenRT 创建实时模拟

奥比中光将接入 NVIDIA Omniverse开发平台
探索NVIDIA AI和Omniverse加速设计创作
NVIDIA Omniverse中的物理模拟功能

Omniverse教程(12):NVIDIA Omniverse USD Presenter的基础应用

使用OpenUSD和NVIDIA Omniverse开发虚拟工厂解决方案

借助OpenUSD和NVIDIA Omniverse开发数字孪生应用
Foxconn利用NVIDIA AI和Omniverse训练机器人
使用USDRT优化NVIDIA Omniverse的动态数据更改功能




评论