 树莓派驱动舵机介绍_树莓派驱动舵机代码
树莓派驱动舵机介绍_树莓派驱动舵机代码

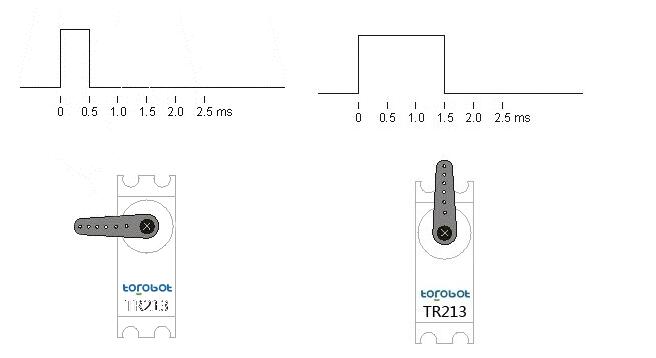
舵机的控制一般需要一个20ms的时基脉冲,该脉冲的高电平部分一般为0.5ms~2.5ms范围内的角度控制脉冲部分。以180度角度舵机为例,那么对应的控制关系是这样的:
0.5ms--------------0度;
1.0ms------------45度;
1.5ms------------90度;
2.0ms-----------135度;
2.5ms-----------180度;
请看下形象描述吧:
舵机的工作电压和电流
每一款舵机都有自己的参数,如TR213舵机的工作电压是4.8-7.2V,TR205舵机的工作电压是4.8-6V,电压不能超过这个范围,否则会很容易烧坏舵机,在不清楚舵机工作电压范围的情况下,建议使用5V给舵机供电。
舵机的工作电流是根据舵机的实际情况而定的,如TR213舵机,在空载的时候电流几乎为0,而在正常负载的情况下,电流在0.5A左右,视实际情况而定。六足机器人需要18个TR213金属舵机,需要提高的电流大概在8A左右,如果电源功率不够会影响舵机的性能,最常见的现象是,当一个舵机负载的时候,其他舵机会出现混乱,无规律的乱摆。
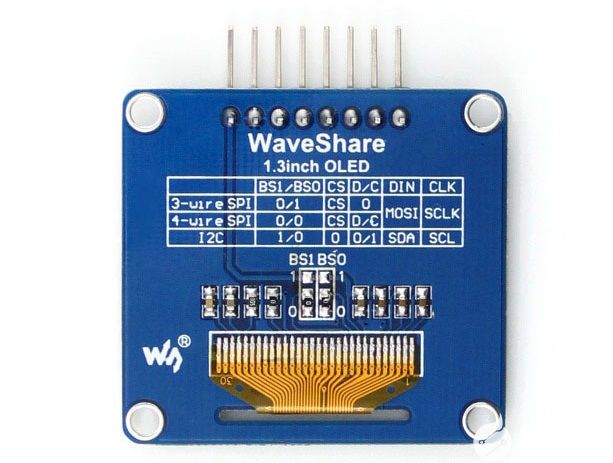
舵机的接线如下图
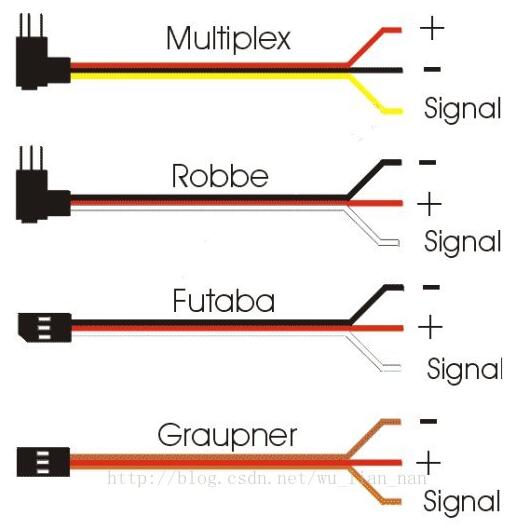
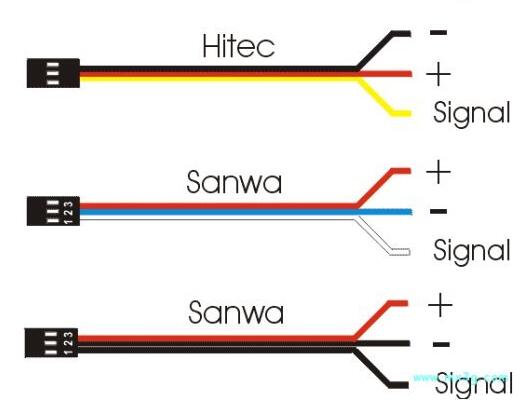
市场上90%的舵机中间那根线都是正级。
基础知识介绍的差不多了,具体可以去百度看看舵机手册。
下面我们来说说在树莓派中,如何用wiringPi库去驱动舵机随心所欲的转。为什么要用wiringPi库呢,因为博主不怎么喜欢写Python,博主喜欢写c/c++代码。废话不多说,开始。
第一:首先,我已经知道了舵机的pwm周期为20ms,然后是这样的
0.5ms--------------0度;
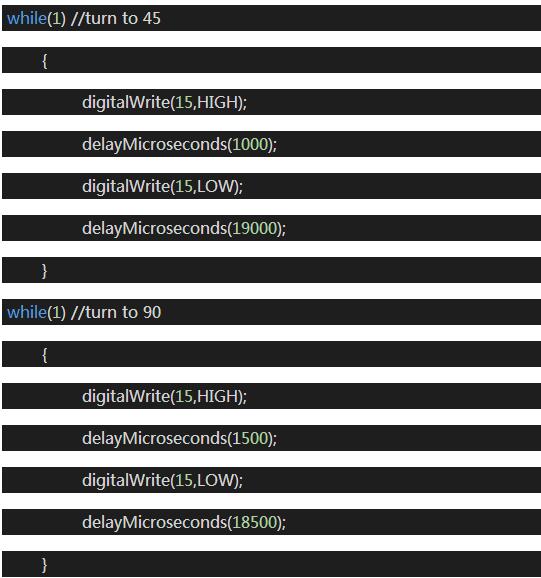
1.0ms------------45度;
1.5ms------------90度;
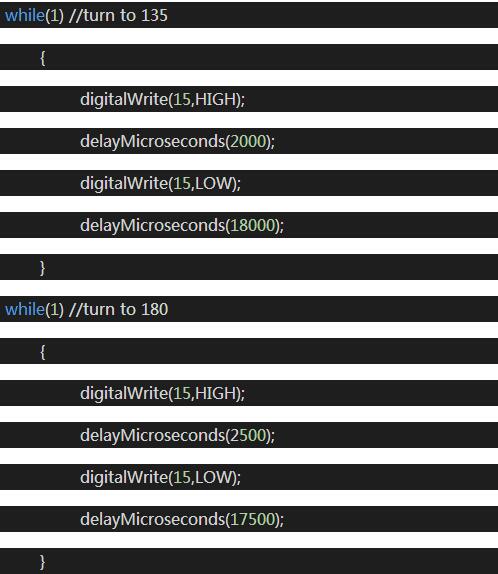
2.0ms-----------135度;
2.5ms-----------180度;
也就是说给它1.5ms的高电平,19.5ms的低电平转向0度位置。这里需要注意,是0度位置,不是舵机转0度,当然如果舵机怎么正好处于0度位置,当然也不转。这里可能就有人要问了,那啥位置算是0度位置呢?根据我对舵机的理解(180度的舵机),就是你向一个方向用手转动舵机,到一个你无法转动的地方,这个位置不是0度位置,就是180度位置。然后你用下面的代码运行一下就知道了。
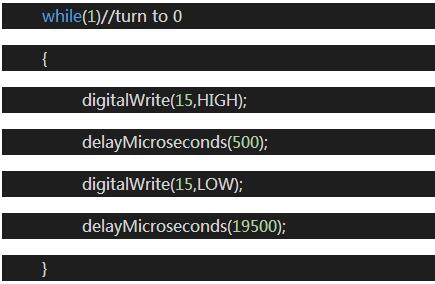
我这里就这样来模仿pwm的。这个代码一运行,舵机就自动到了0度位置。
同理,想转到45度位置,90度位置,135度位置,180度位置的代码如下:
这里可能有人要说为啥不用delay()函数呢,因为delay函数精确到毫秒,当我传1.5给它的时候,和传1给它的时候,你会发现舵机都是转向45度位置,因为delay(int x),当1.5传过去的时候精度丢失了。(我一开始就犯了这个错误,尴尬啊)
到这里我想你应该已经知道怎么旋转45度,90度,等等了吧。然后你可能发现舵机旋转的太快,可能不受自己的控制了。这里我就要给你提供一种思路,怎么去解决这个问题。
当然,本人能力有限,写的难免有错误,希望指正。
下面我给一个很不错的链接,想深入研究的可以去看看(他用的是单片机)
http://www.njliaohua.com/lhd_5xtsq7jr1e0088t3wpu3_1.html
我是这样认为的。0.5ms转向0度,1ms转向45度,那个这其中是不是经历了0.5ms,而且转了45度,所以我就用0.5=500us,500us/45度。然后得出约为11.11us/度。
接下来我的代码是这样写的。
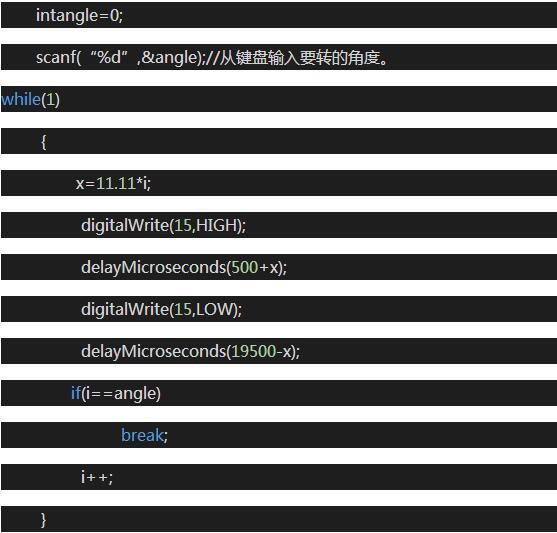
这样一来速度确实是降了下来,但是每次舵机都要先转向0度位置,然后才能转向我们输入的个角度位置。
树莓派3b+控制舵机、伺服电机的驱动代码
#include《stdio.h》
#include《wiringPi.h》
void init();
int main()
{
init();
int angle=0;
scanf(“%d”,&angle);
int i=0;
float x=0;
int k=180;//180次循环的时间够了
while(k--)
{
x=11.11*i;
digitalWrite(15,HIGH);
delayMicroseconds(500+x);
digitalWrite(15,LOW);
delayMicroseconds(19500-x);
if(i==angle)
break;
i++;
}
return0;
}
void init()
{
wiringPiSetup();
pinMode(15,OUTPUT);
}
-
舵机
+关注
关注
17文章
373浏览量
42837 -
树莓派
+关注
关注
122文章
2069浏览量
109705
发布评论请先 登录
树莓派教程 详解树莓派驱动OLED模块

请教利用树莓派制作六足机器人的问题
树莓派之MPU6050控制舵机转向

微雪电子树莓派舵机驱动板 Servo Driver HAT (B)介绍

微雪电子树莓派舵机驱动板|Servo Driver HAT介绍
树莓派+单片机+驱动电机

树莓派遥控视频小车(附代码)
树莓派驱动步进电机
树莓派驱动步进电机
树莓派控制步进电机





 工商网监
工商网监
评论