 云台相机和天线稳定系统设计
云台相机和天线稳定系统设计

早在2011年,爱普生就发布了旗下首款IMU,可以正确检测出包含从微小的倾斜到大范围动作在内的惯性运动信息。自此,爱普生 IMU便在航空航天以及工业产品中得到了广泛应用,并因杰出的质量和性能而赢得高度赞誉。
随着自主精密农业机械、智能施工机械和无人机应用的快速发展,小型高性价比、高精度定位装置的需求与日俱增,而爱普生最新开发的M-G370和M-G365凭借出色的表现为自动驾驶和导航提供FOG*2级性能。
此外,
M-G370和M-G365还保持了
与早期型号M-G364和M-G354的向后兼容性,
能轻松实现性能升级。
对于具有FOG*2级性能的M-G370来说,凭借高精度和高稳定的测试性能,被广泛应用于惯性导航和对位置测量精度要求高的领域,如自主驾驶、无人驾驶等领域。
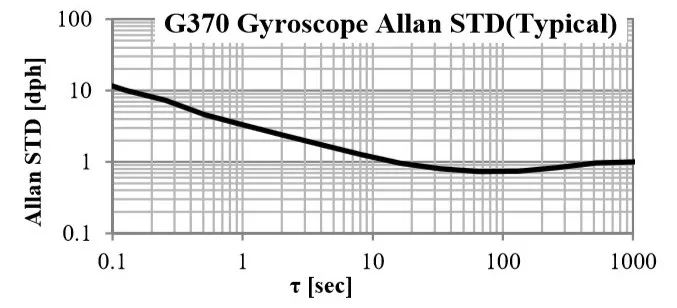
M-G370还搭载了最新开发的陀螺传感器*3,极大提高了零偏稳定性*4(0.8°/小时)、角随机游走*5和噪音性能。并且最新开发的加速度计大大提高了零偏稳定性(达到6 uG,而M-G364的零偏稳定性为50 uG),初始零偏误差为2 mg (1σ)。
新一代IMU标准的M-G365,安装简单,具有新的姿态角输出功能并支持各种应用,并且具有扩展卡尔曼滤波器*6的高速DSP*7能以较低功耗提供高精度实时姿态角输出(横滚角/俯仰角/偏航角)*8,可广泛适用于车辆、船只及其他多种工业产品和系统,用来测量数据和控制运动等,而且系统端不再需要动态姿态角的高速计算,从而减小了系统载荷和功耗。
值得一提的是,新型M-G370和M-G365均采用了最新开发的高性能传感器,具有稳定性更好、噪音更低、动态范围更广的优越特点。而且动态性能出色(比例因子非线性),非常适合从静态到高速运动的高精度测量。
与此同时,M-G370和M-G365的向后兼容性,更是大大降低了用户开发成本和评价时间,更有较低的电流消耗(16 mA,而M-G364和M-G354为18 mA)。
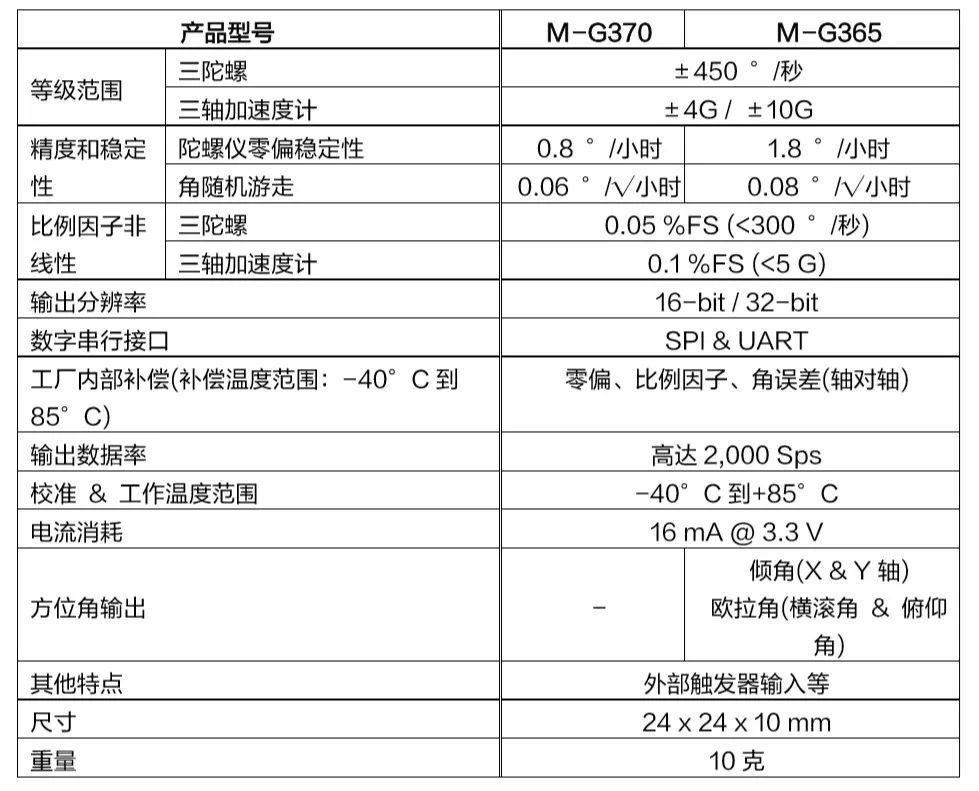
爱普生M-G370和M-G365产品技术规格
应用实例
●精密农业和建筑机械的自主驾驶和无人控制。
●无人设备,如工业无人机、地面车辆和水下设备。
●导航系统(GNSS*9、INS*10、高精度定位仪)。
●云台相机和天线稳定系统。
●工业设备和车辆的振动、角度和路径测量。
*1惯性测量装置(IMU)是用于感应惯性运动的设备。它有三轴角速度传感器和三轴加速度计组成。
*2光纤陀螺仪(FOG)是一种在少量高性能IMU中使用的、基于光纤和光干涉特性的陀螺传感器。
*3陀螺传感器(角速度传感器)测量单位时间上某物体关于参考轴的旋转角度(角速度)。
*4零偏稳定性是一个衡量规定取样时间和平均时间间隔上计算的陀螺仪零偏随机变化的指标,该零偏变化用1/f噪声密度表示。
*5角随机游走是一个衡量规定取样时间和平均时间间隔上计算的陀螺仪零偏随机变化的指标,该零偏变化用随机噪声密度表示。
*6扩展卡尔曼滤波器利用模型估值和实际观察值依次计算最可能值,以便更准确地预测观察值中的信息,包括滤波器误差。
*8方位角(横滚角、俯仰角和偏航角):
•横滚角:物体沿其纵轴旋转的角度
•俯仰角:物体沿其横轴旋转的角度
•偏航角:物体沿其垂直轴旋转的角度
*9全球导航卫星系统(GNSS)是一种用于准确指出地球上任意一处地理位置的卫星系统。
*10惯性导航系统(INS)
-
高精度
+关注
关注
1文章
867浏览量
27128 -
自动驾驶
+关注
关注
794文章
15006浏览量
181610
原文标题:【世说芯品】爱普生开始交付两款新型IMUs:M- G370和M-G365
文章出处:【微信号:Excelpoint_CN,微信公众号:Excelpoint_CN】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
自稳定云台的电机选什么好
如何利用磁罗盘和GPS的定向、定位技术设计车载定向天线云台随动系统?
运动相机和手持云台解决方案
大疆手持云台如影S评测 相机手持云台首选
大疆发布目前最小的口袋云台相机OSMO Pocket
佳能云台相机专利通过:可换镜头设计




评论