 磁致伸缩位移传感器简介
磁致伸缩位移传感器简介

1 引言
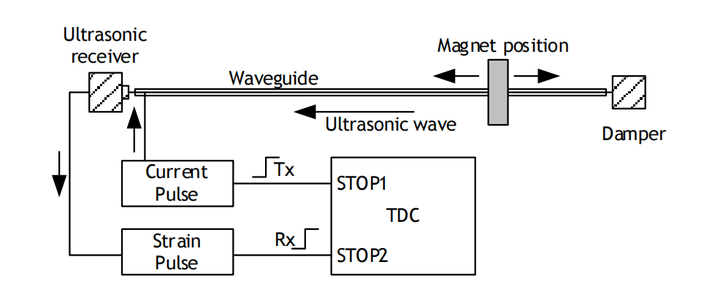
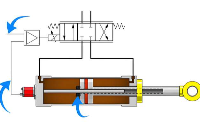
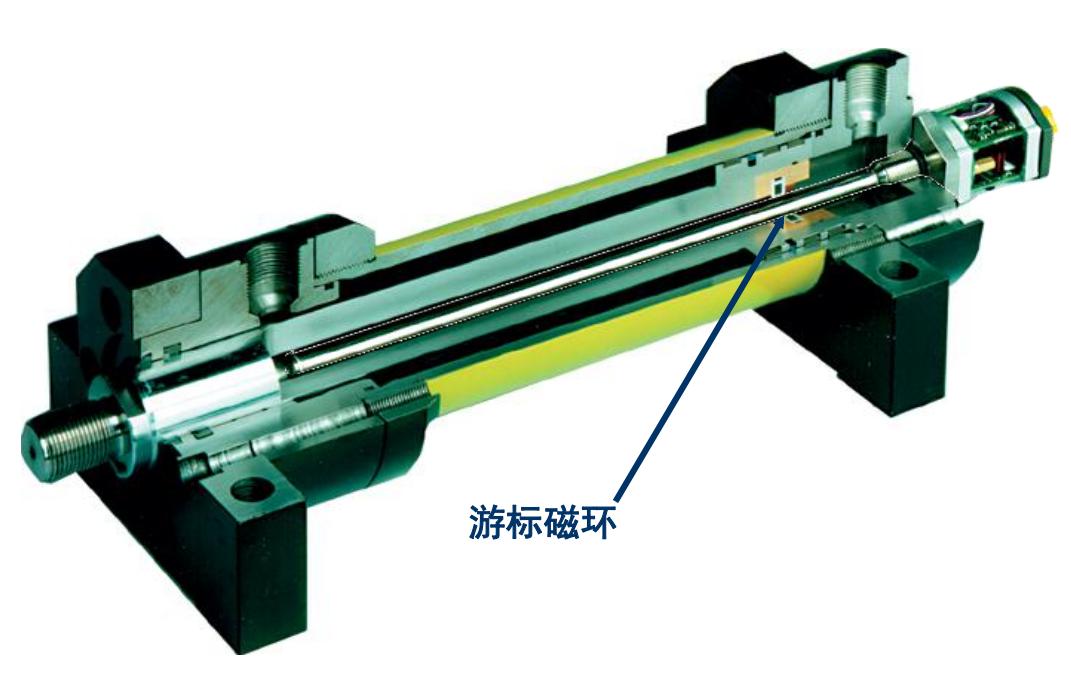
磁致伸缩线性位移传感器利用磁致伸缩效应进行位置传感。其组成包括铁磁波导、位置磁体、阻尼区、应变脉冲转换器和测量电子器件。
当向波导施加短电流脉冲时,会产生径向磁场。与可移动机械部件相连的位置磁体,会在波导上的对应位置产生磁场。
两个磁场的瞬时相互作用会产生扭转应变脉冲,该脉冲沿波导向两端传播。为避免测量干扰,应变脉冲和电流脉冲会在波导末端被阻尼。返回测量电子器件方向的应变脉冲,会被应变脉冲转换器中的拾波线圈转换为电信号。
由于超声波的传播速度已知,通过测量施加电流脉冲与接收到电信号的时间间隔,可将其转换为线性位置测量值。
磁致伸缩传感器的基本组件
组件
铁磁波导
位置磁体
阻尼区(接地)
应变脉冲转换器
测量电子器件
传播速度对比
声波(340 m/s…2,850 m/s)<< 电磁波(3.00×10⁸ m/s)
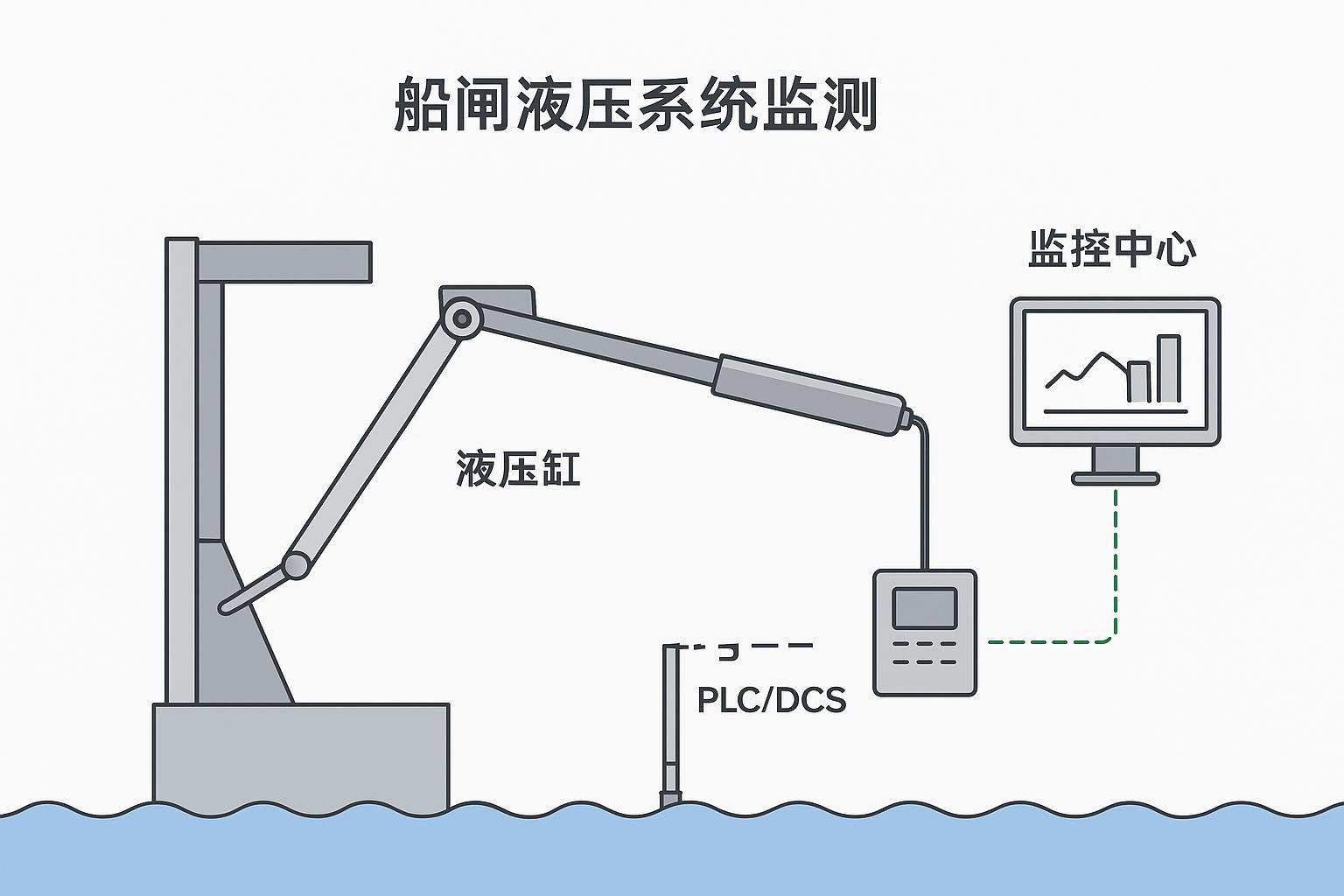
非接触式线性位置传感在许多工业应用中不可或缺。磁致伸缩位移传感器还能实现低至1微米的高精度测量,已广泛应用于塑料注塑成型机、液压和气压缸、木工机械等领域。电子器件面临的主要挑战是高精度时间测量,而使用时间数字转换器(TDC)可轻松解决这一问题。
1.1 应用实例
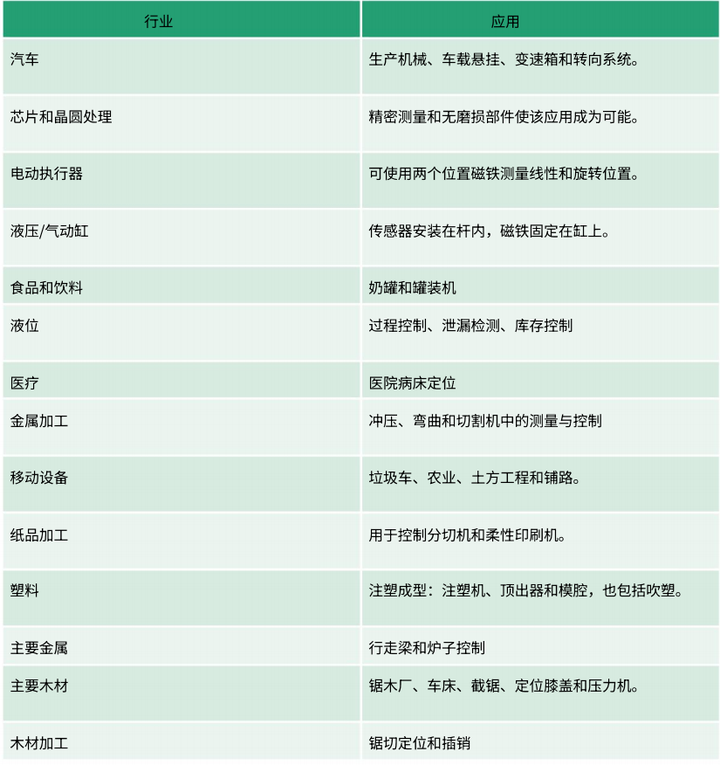
磁致伸缩线性位移传感器在众多行业中有广泛应用。表1列出了目前在生产流程和产品中采用这类传感器的部分行业及应用场景。 表1:使用磁致伸缩线性位移传感器的行业及应用
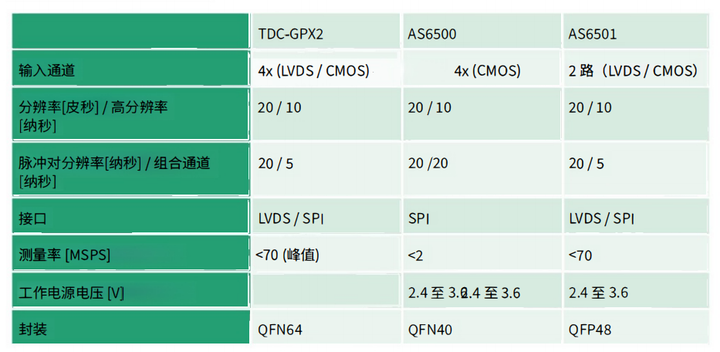
1.2 技术对比
在“设计选用”线性位置传感器时,需考虑诸多因素。必须妥善关注传感器与应用需求的匹配,包括电源输入、信号输出、外壳样式、安装结构、传感行程,以及传感技术在应用条件下进行测量的能力。
鉴于这些考量因素和众多可选方案,该任务可能显得有些棘手。不过,表2列出了一些值得考虑的主要产品方案。 表2:几种常用线性位置传感器的对比
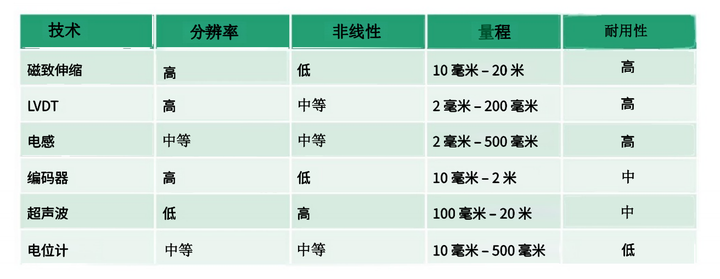
a. 分辨率越高越好,意味着输出变化的步长更小。
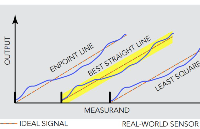
b. 非线性度越低越好,指输出与理想直线的偏差。
c. FSR表示全行程。
d. 电位器是接触式传感器,所列其他均为非接触式。
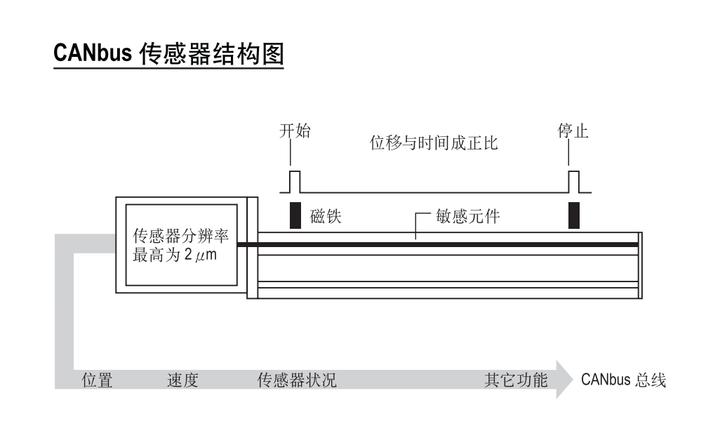
1.3 测量原理
测量元件由磁致伸缩波导构成。磁致伸缩材料在磁场作用下会发生弹性形变,该效应的应用方式如下:
磁致伸缩波导制成管状,内部有铜棒。通过短电流脉冲启动测量,这会在波导周围产生环形磁场。可移动部件的位置由磁体标记,其磁场与电流脉冲的环形磁场垂直。两个磁场的相互作用产生应变脉冲,该脉冲以声速沿波导传播。置于波导末端的传感器将声脉冲转换为电信号,传播时间与磁体位置直接成正比。波导中的声速约为2800 m/s,对应约0.36 ms/m。要实现1 mm的分辨率,时间测量精度必须达到t = 360 ns!
例如,在测量距离为1米、波导速度为2800 m/s时,时间延迟为: 1米 ÷ 2800米/秒 = 0.35毫秒
波导中波的传播速度约为2800 m/s,且对环境影响不敏感。由于导体中波的速度v已知(如通过校准),且测量了电流脉冲发射与磁致伸缩回波接收的时间t,因此可按以下公式近似确定路径: 距离s ≈ 波速v × 时间t
因此,距离s的确定精度仅受时间测量分辨率的限制。典型装置可实现约1 µm的分辨率,对应时间t = 360 ps。
误差来源
该方法的一个缺点是,导体中波的传播速度在一定程度上取决于导体温度T:
如果不采取措施补偿这种偏差,当导体温度偏离校准温度(通常为室温)时,测量精度会降低。
审核编辑 黄宇
-
位移传感器
+关注
关注
6文章
1275浏览量
36974
发布评论请先 登录








评论