 MAX32670高可靠性、超低功耗微控制器技术手册
MAX32670高可靠性、超低功耗微控制器技术手册

概述
在Darwin家族中,MAX32670是一款超低功耗、高性价比、高可靠性的32位微控制器,在实现复杂的传感器处理设计的同时不会影响电池寿命。器件集成了高度灵活性的多功能电源管理单元与功能强大的Arm® Cortex-M4 (带浮点运算单元,FPU)。MAX32670也为传统设计从8或16位微控制器升级提供了简便、成本优化的途径。
器件集成高达384KB闪存和160KB SRAM承载应用程序和传感器代码。在整个闪存、RAM和缓存全领域内支持纠错码(ECC),支持单比特纠错和双比特检测(SEC-DED),确保超高可靠性的代码执行支持一些要求苛刻的应用。另外集成了一些附加功能,例如集成了两个窗型看门狗定时器,具有极高的灵活性和独立时钟,进一步增强了方案的可靠性。掉电检测功能确保掉电、上电以及意外电源瞬变期间系统的正确工作。
器件集成了多种高速外设,例如3.4MHz I²C、50MHz SPI和4MBAUD UARTs,最大程度提高通信带宽。此外,提供一个低功耗UART可在最低功耗休眠模式下运行,促进唤醒而避免丢失任何数据。提供总共6个具有I/O功能的定时器,包括2个低功耗定时器,即使在最低功耗休眠模式下也可以进行脉冲计数、捕获/比较和PWM。该器件将全部这些功能集成到微小尺寸封装中:5mm x 5mm、40引脚TQFN-EP封装和1.7mm x 2.2mm、24焊球WLP封装。
数据表:*附件:MAX32670高可靠性、超低功耗微控制器技术手册.pdf
应用
特性
- 高成效微控制器,适用于低功耗、高可靠性设备
- Arm Cortex-M4 FPU处理器,高达100MHz
- 384KB闪存,带纠错
- 160KB SRAM (128KB支持ECC),可选择在最低功耗模式下保持数据
- 16KB统一缓存,带ECC
- UART引导装载程序
- 双或单电源操作
- 0.9–1.1V V
CORE超低电源电压 - 内部LDO利用1.7V至3.6V单电源工作
- 0.9–1.1V V
- 宽工作温度范围:-40°C至+105°C
- 灵活的时钟方案
- 内部高速100MHz振荡器
- 内部低功耗7.3728MHz和超低功耗80kHz振荡器
- 14MHz至32MHz振荡器(要求外部晶振)
- 32.768kHz振荡器(要求外部晶振)
- 用于内核的外部时钟输入
- 用于LPUART和LPTMR的外部时钟输入
- 电源管理最大程度延长电池应用的工作时间
- 44µA/MHz工作功耗 @ 0.9V,高达12MHz
- 50µA/MHz工作功耗 @ 1.1V,高达100MHz
- 备份模式下全存储空间保持功耗为2.6µA @ V
DD= 1.8V - 超低功耗RTC:350nA @ Vsub>DD = 1.8V
- 从LPUART或LPTMR唤醒
- 最优外设组合,提高平台扩展性
- 安全性和完整性
- 提供安全引导
- AES 128/192/256硬件加速引擎
- TRNG符合SP800-90B标准
- 32位CRC加速引擎
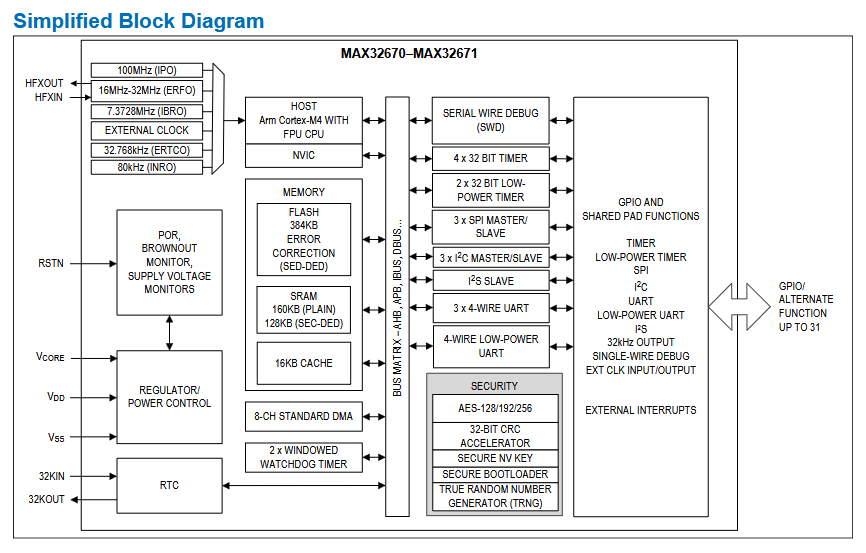
框图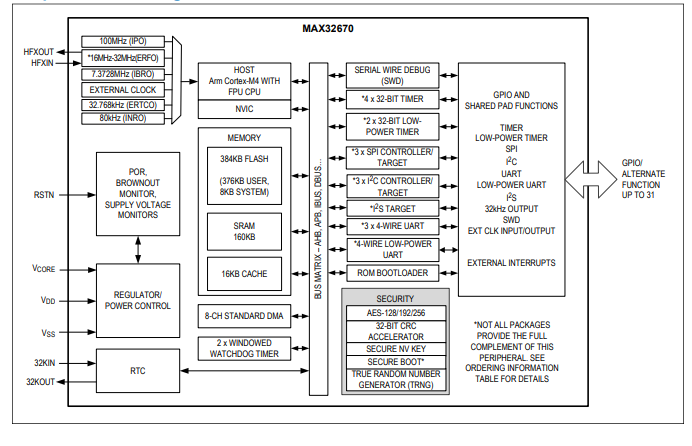
电特性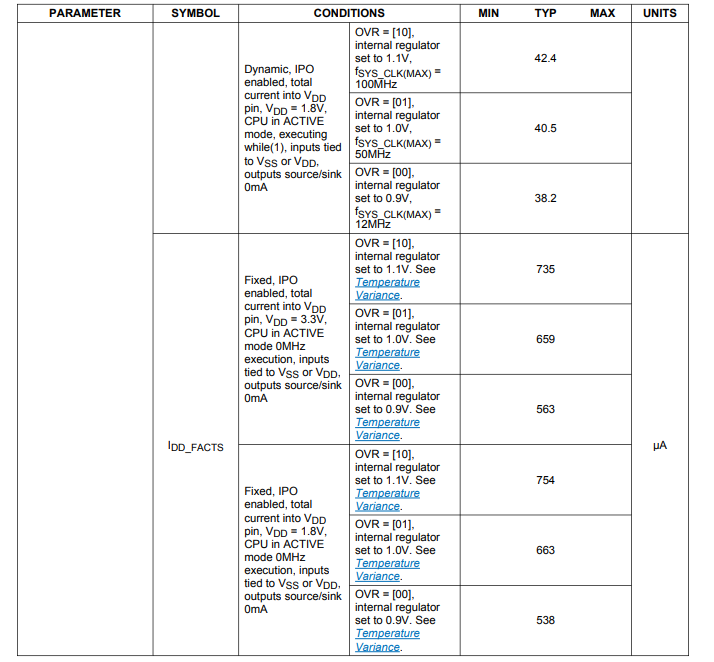
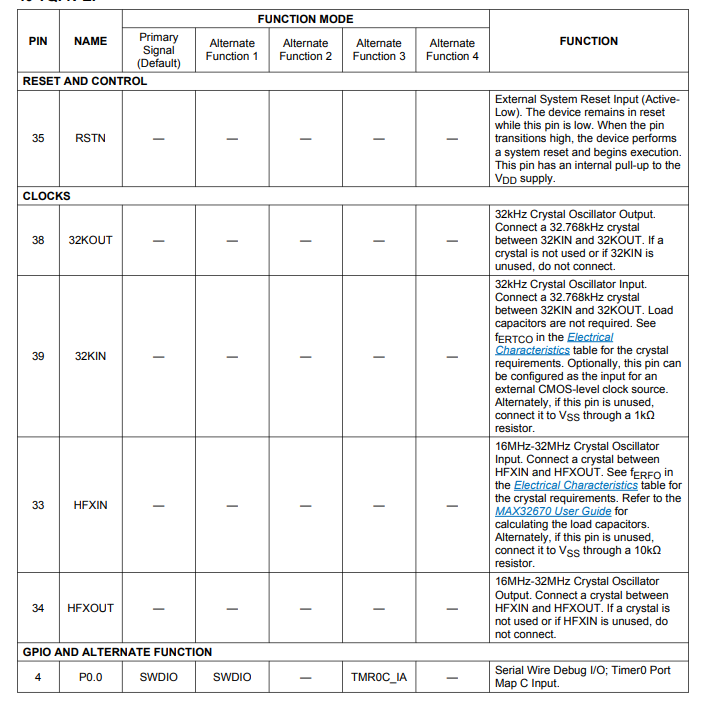
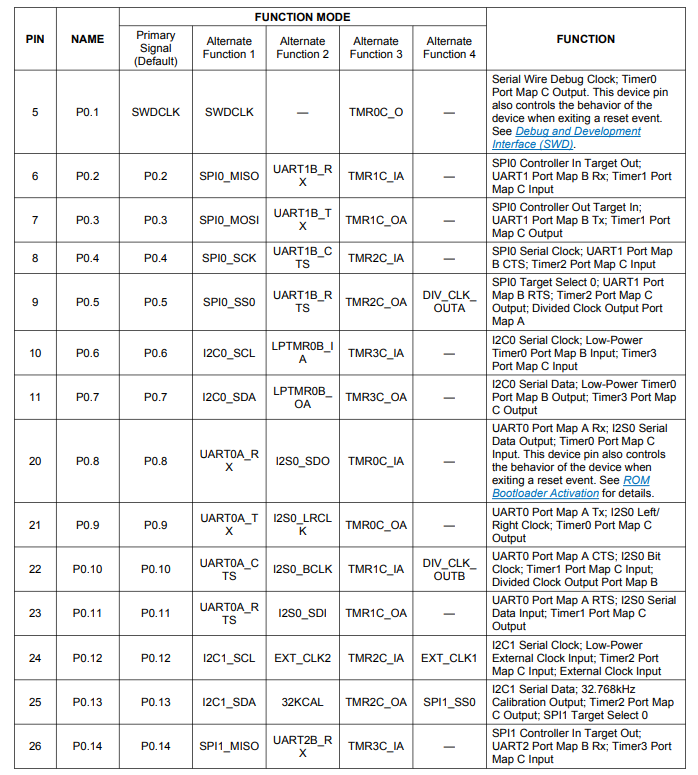
引脚配置描述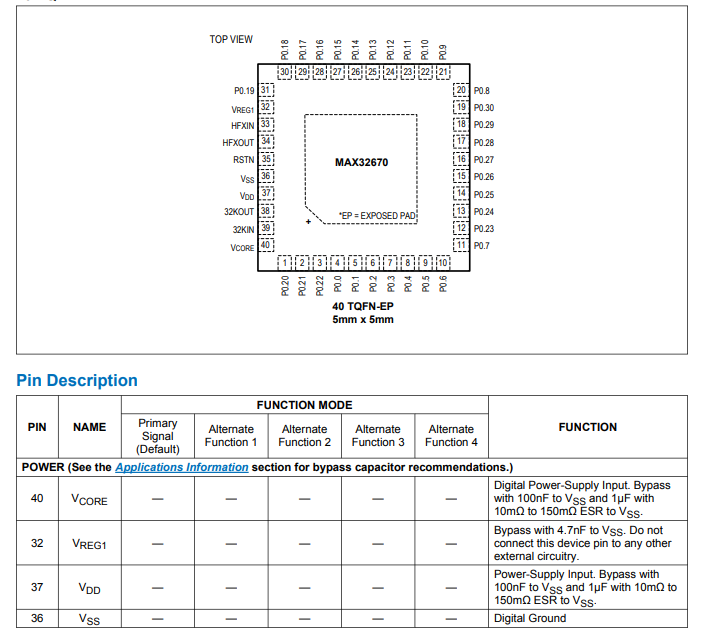
应用信息
旁路电容建议
正确使用旁路电容可减少集成电路(IC)产生并传入接地层的噪声。“引脚说明”表会指出哪些引脚应连接旁路电容,以及对应的接地层。
建议在IC封装的每个引脚/焊球处都连接一个旁路电容。例如,若“引脚说明”表显示与电源A相关的器件引脚有四个,那么应分别将四个电容连接到这四个引脚上,总共需要四个电容。
电容应尽可能靠近对应的器件引脚放置。若某引脚推荐使用多个电容值,这些电容应以并联方式放置,且最低值的电容最先放置,并且最靠近引脚。
实时时钟(RTC)晶体指南
内部低功耗RTC振荡器可将功耗降至最低,并最大限度延长电池使用寿命。RTC晶体的设计负载电容必须为6pF(在“电气特性”表中称为CL 或CL_XTAL ),以达到其标称频率。不支持设计负载电容CL_XTAL值大于6pF的晶体。需注意,晶体负载电容是指晶体两端串联的总电容,因此对于“6pF晶体”而言,每个引脚的焊盘和走线总电容应为12pF。该器件的RTC集成了负载电容,RTC运行无需外部负载电容。
与外部参考时钟相比,数字微调功能可补偿RTC高达±127ppm的误差。详情请参考《MAX32655用户指南》。
虽然无需外部负载电容来启动或维持时钟,但用户也可使用外部负载电容来调整时钟。最终的电容值必须在PCB布局完成后确定。不过,RTC振荡器的低功耗设计要求每个引脚的总电容(CPAD + CSTRY + CL_XTAL)最大为12pF。
如果RTC未使用,建议将32KOUT引脚通过1kΩ电阻连接到VSYS。对于成本或空间受限的设计,可将32KIN引脚直接连接到VSYS。
ROM引导加载程序激活
在表9所示的任何引导加载程序事件期间,引导加载程序会对激励引脚进行采样。如果在引导加载程序激活事件期间,任何激励引脚未处于其活动状态,则引导加载程序将被绕过,器件开始执行应用代码。
如果在引导加载程序激活事件期间,所有激励引脚均处于其活动状态,则应用程序软件不会执行,而是ROM引导加载程序接管对器件的控制。器件会输出状态提示并开始与主机系统进行引导加载程序会话,以进行控制或编程。当ROM引导加载程序处于控制状态时,激励引脚将被忽略,并且可以驱动为任何值以用于通信(如适用)。
在激励引脚处于其非活动状态时,通过执行上电复位(POR)或置位RSTN,可随时终止引导加载程序会话。
-
微控制器
+关注
关注
49文章
8880浏览量
165738 -
ARM
+关注
关注
135文章
9588浏览量
393683 -
Cortex-M4
+关注
关注
6文章
100浏览量
48612
发布评论请先 登录
Maxim 推出MAX32670低功耗Arm® Cortex®-M4微控制器
基于微控制器的选择解读超低功耗意义
高可靠性微控制器设计研究
NASDAQ: MXIM宣布推出MAX32670低功耗Arm Cortex-M4微控制器
了解系统可靠性何时以及为何如此重要
MAX32672:高可靠性、细度、超低功率-超低功率臂Cortex-M4F微控制器,12Bit MSPS 1MSPS ADC数据表 ADI

MAX32670EVKIT: Evaluation Kit for the MAX32670 Data Sheet MAX32670EVKIT: Evaluation Kit for the MAX32670 Data Sheet
MAX32670数据手册# 带FPU,高可靠性,超低功耗MCU



评论