 ADXRS646具有高稳定性、低噪声和振动抑制特性的偏航角速度陀螺仪技术手册
ADXRS646具有高稳定性、低噪声和振动抑制特性的偏航角速度陀螺仪技术手册

概述
ADXRS64x系列低噪声、具有振动抑制特性的偏航角速度陀螺仪可直接取代现有设计中的ADXRS62x系列,实现性能升级。
ADXRS646与ADXRS62x系列引脚兼容、封装兼容,提供±250°/s的测量范围、1 kHz带宽、6°/hr漂移、低宽带噪声、0.015°/s/g的低g灵敏度和0.0001°/s/g²的振动校正特性,非常适合高性能导航和平台稳定应用。
ADXRS646是一款角速率传感器(陀螺仪),采用ADI公司取得专利的大规模BiMOS表面微加工工艺制造,在单芯片上实现完整的陀螺仪。它采用先进的差分四路传感器设计,可有效抑制线性加速度和振动的影响,能够在恶劣的冲击和振动环境中执行速率检测。
输出信号RATEOUT (1B, 2A)是电压值,与围绕封装上表面垂直轴转动的角速率成比例。测量范围最小值为±250°/s。输出与所提供的基准电源成比率。芯片工作还需要其它几个外部电容。
该器件提供温度输出,用于补偿技术。两路数字自测输入通过机电方式激励传感器,以测试传感器和信号调理电路是否正常工作。ADXRS646提供7 mm × 7 mm × 3 mm BGA芯片级封装。
数据表:*附件:ADXRS646具有高稳定性、低噪声和振动抑制特性的偏航角速度陀螺仪技术手册.pdf
应用
- 工业应用
- 恶劣的机械环境
- 平台稳定
特性
- 在单芯片上实现完整的角速度陀螺仪
- Z轴(偏航角速度)响应
- 偏置稳定度:12°/小时
- 角向随机游动:0.01°/√s
- 可在宽频率范围内提供高振动抑制特性
- 测量范围可扩大至±450°/s
- 抗冲击能力:10,000 g
- 输出与基准电源成比率
- 6 V单电源供电
框图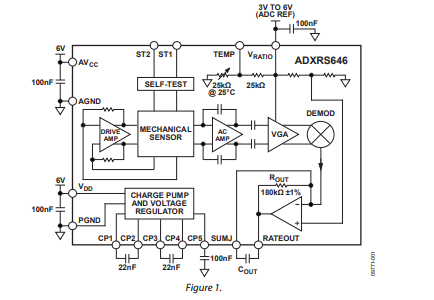
引脚配置描述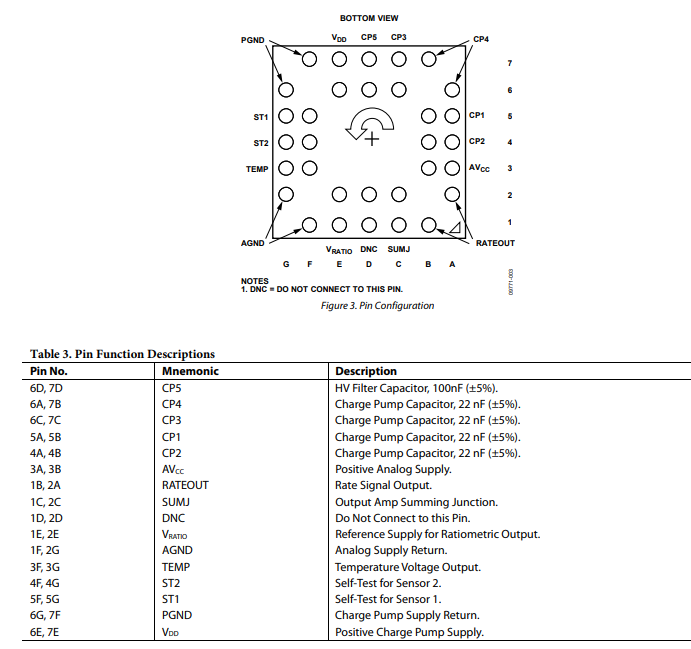
典型性能特征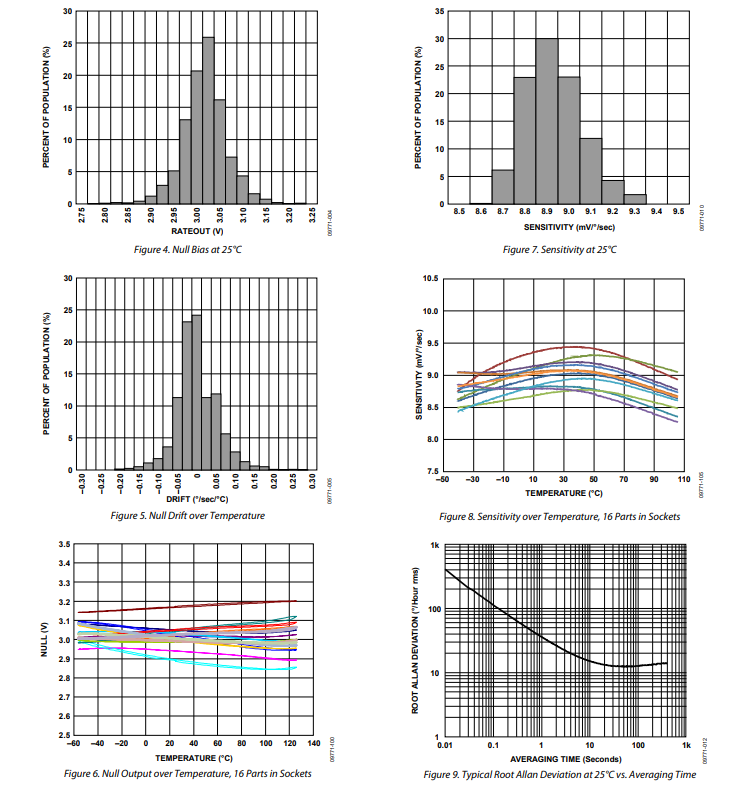
ADXRS646基于谐振陀螺仪原理工作。图19展示了四个多晶硅传感结构中其中一个角的简化示意图。每个传感结构都包含一个抖动框架,该框架通过静电驱动至谐振状态,产生必要的速度分量,以便在受到角速率作用时生成科里奥利力。ADXRS646旨在感测Z轴(偏航)角速率。
当传感结构受到角速率作用时,产生的科里奥利力会耦合到外部传感框架,该框架包含置于固定拾取指状结构之间的可移动指状结构,从而形成一个电容式拾取结构来感测科里奥利运动。产生的信号会传输至一系列增益和解调级,以产生电角速率输出。四重对称设计可抑制线性和角加速度,包括外部重力加速度,这是通过将四个传感结构机械耦合实现的,使得外部重力加速度以共模信号的形式出现,而这些共模信号可通过ADXRS646中采用的全差分架构予以消除。
静电谐振器工作需要21V电压。由于大多数应用通常仅提供6V电压,所以内置了一个电荷泵。如果有外部高压电源可用,CP1至CP4上的两个电容可被省略,并且该电源可以连接到CP5(引脚6D、引脚7D)。在ADXRS646通电时,请勿将CP5接地。在某些情况下,电荷泵可能无法启动,但在不断开ADXRS646电源的情况下移除接地后,它可能会启动。
设置带宽
外部电容C_{OUT} 与片上电阻R_{OUT} 配合使用,构成一个低通滤波器,用于限制ADXRS646速率响应的带宽。 - 3dB频率由R_{OUT} 和C_{OUT} 设定,公式为:
该频率可精确控制,因为R_{OUT} 在制造过程中已被修整为180 kΩ ± 1% 。在RATEOUT引脚(1B、2A)和SUMJ引脚(1C、2C)之间应用的任何外部电阻R_{EXT} 会导致:
此外,通常还会添加一个额外的滤波器(无论是硬件还是软件),以衰减来自解调的18kHz谐振频率处的高频噪声尖峰。推荐使用由一个3.3kΩ 串联电阻和22nF 并联电容(2.2kHz极点)组成的RC输出滤波器。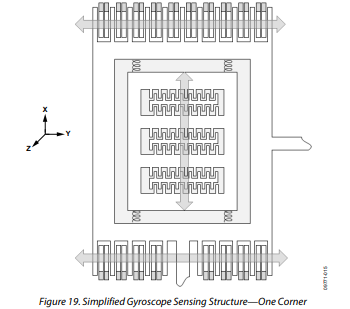
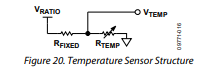
温度输出与校准
在整个温度范围内对陀螺仪进行校准以提高测量精度是很常见的做法。ADXRS646具有与温度相关的电压输出,为校准方法提供输入。温度传感器结构如图20所示。
温度输出具有非线性特性,任何负载电阻都会连接到TEMP输出引脚,从而降低TEMP输出及其温度系数。因此,建议对输出进行缓冲。
TEMP(3F、3G)处的电压在25°C时标称值为2.9V,V_{RATIO} = 6V 。温度系数约为10mV/°C(典型值),在25°C时。整个温度范围内的输出响应如图17所示。虽然TEMP输出具有高度重复性,但绝对精度一般。
-
传感器
+关注
关注
2579文章
55926浏览量
796055 -
陀螺仪
+关注
关注
44文章
911浏览量
102259
发布评论请先 登录
EVAL - ADXRS614评估板:ADXRS614陀螺仪性能评估利器
告别昂贵与笨重:这款高精度MEMS陀螺仪打破天花板

精准感知,稳控未来:MEMS陀螺仪助力无人机飞控新高度

Neway微波的稳定性优势
光纤陀螺仪与惯性导航系统在无人车驾驶中的应用

什么是光纤陀螺仪?陀螺仪有哪些作用?
低噪声恒温晶振(OCXO)FOC-5S-LN:电信基站与测试设备应用中的频率稳定性与相位噪声性能分析
无人机如何靠陀螺仪保持稳定飞行?

为什么三轴MEMS陀螺仪是无人机飞控系统的核心传感器?

MEMS陀螺仪如何实现高精度寻北?
**如何用三轴MEMS陀螺仪实现精准姿态感知?**
**无人机飞控如何靠三轴MEMS陀螺仪实现稳定飞行?**
MEMS陀螺仪正在取代光纤陀螺仪?
振动陀螺仪传感器的工作原理
MEMS陀螺仪的寻北原理是什么?精度如何?




评论