 极具挑战的移动机器人设计,搭载i.MX RT1176的恩智浦一体式MR-VMU-RT1176 VMU来帮你
极具挑战的移动机器人设计,搭载i.MX RT1176的恩智浦一体式MR-VMU-RT1176 VMU来帮你

恩智浦的MR-VMU-RT1176是一款紧凑型、一体式车辆管理单元 (VMU)。该器件搭载i.MX RT1176跨界MCU,集成双核Arm Cortex-M7/M4处理器,并配备全面的传感器套件与丰富的连接选项,能够显著加速工程师构建下一代系统的进程。
移动机器人设计人员面临的挑战
移动机器人系统的设计极具复杂性,工程师需在一个系统内平衡实时控制、传感器融合及高速通信。传统设计需要集成多个分立式组件,如微控制器 (MCU)、惯性测量单元 (IMU)、全球导航卫星系统 (GNSS) 模块及网络接口,导致架构分散、繁琐,还延长了开发周期。
在移动机器人系统的设计过程中,工程师需应对多重挑战。其中实时处理是最严苛的环节之一,控制环路、传感器融合及自主决策均要求低延迟执行。许多MCU在高计算性能与实时约束之间难以取得平衡,工程师往往需要整合多个处理器或外部加速器,这进一步增加了复杂性与开发难度。
集成是另一个考虑要素,移动机器人要求确保处理单元、IMU、GNSS模块、电机控制器和网络接口的精准协调。然而,在传统设计中,工程师需要手动集成和同步这些组件,这不仅增加了开发时间,还可能带来不兼容的风险。
可靠的通信也非常重要。VMU必须以非常低延迟的传输传感器数据与执行器指令,以确保稳定、可预测的运动表现。然而,许多系统仍依赖传统协议,缺乏对CAN FD或汽车以太网等稳健、低延迟网络解决方案的支持,限制了数据传输效率与实时性。
最后,工程师广泛依赖PX4、Zephyr RTOS和Cognipilot等开源生态合作体系的软件,这些合作体系为实时控制提供必要的中间件和框架。然而,将这些软件与定制硬件配置无缝集成通常需要大量的开发工作。
借助模块化解决方案优化移动机器人
MR-VMU-RT1176提供紧凑的模块化解决方案,高效应对上述挑战。

MR-VMU-RT1176是一款紧凑、轻便的车辆管理单元解决方案,专为移动机器人设计。
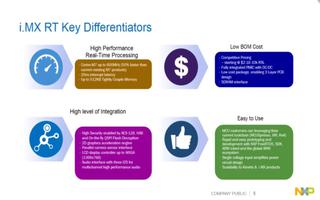
处理能力
MR-VMU-RT1176基于i.MX RT1176跨界MCU构建,专为满足移动机器人严苛的计算需求而设计。它采用双核架构,其中Cortex-M7 (1GHz) 用于控制环路、传感器融合及人工智能推理等高性能实时任务,而Cortex-M4 (400MHz) 则高效地管理后台处理,减轻主核的负担。此外,该系统配备64MB外部闪存与2MB RAM,确保固件执行及实时数据处理的充足存储空间。
开始构建下一代移动机器人,先了解一下MR-VMU-RT1176产品详情
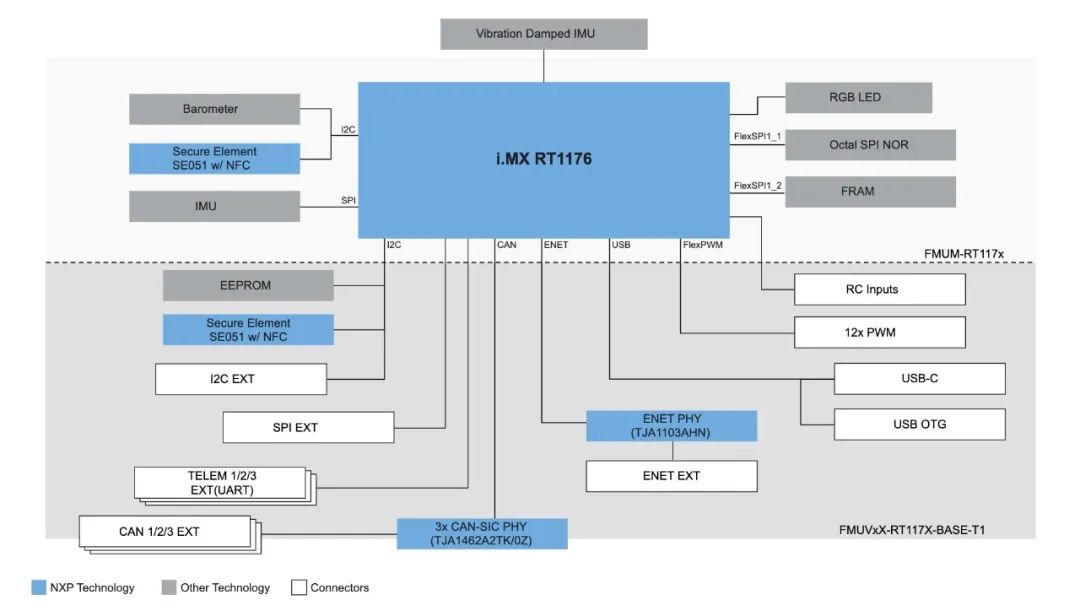
MR-VMU-RT1176结构框图
全面的传感器套件
MR-VMU-RT1176集成了一套全面的传感器套件,可实现机器人系统的高精度运动跟踪与环境感知。该套件包括:
BMI088 6轴IMU,用于精确运动传感
BMM150和IST8310磁力计,用于航向与方位估计
两个BMP388气压计,用于高度和压力传感
两个ICM-42688 6轴IMU,用于增强运动跟踪的冗余与精度
其中一半传感器集成于内部连接的IMU板,使工程师能够轻松替换传感器,以适应未来的系统升级需求。
连接和接口选项
工程师需要灵活的通信选项,以便将VMU与电机、传感器及网络模块高效集成。MR-VMU-RT1176提供:
USB-C 2.0连接器和JST-GH引脚接头,用于高速数据传输
12路PWM输出,可直接控制执行器、伺服系统及电机
具有信号提升能力 (SIC) 的三重CAN-FD
100Base-T1汽车以太网,支持高带宽数据交换
RC输入与SBUS兼容接收器兼容,用于远程控制
由于这些连接器均遵循Dronecode标准,工程师能够轻松访问庞大的即插即用组件生态合作体系,这些组件能够与MR-VMU-RT1176搭配使用。
开发人员体验与软件生态合作体系
MR-VMU-RT1176具备高度兼容性,能够与开源实时操作系统及机器人框架轻松集成。例如,它支持Zephyr RTOS,这是一个专为实时嵌入式应用设计的轻量级模块化系统。此外,该系统支持用于自主机器人的Cognipilot,它提供了一个基于Zephyr的自动驾驶平台。该单元还运行NuttX RTOS,这是一款符合POSIX标准的操作系统,以其强大的实时处理能力而闻名。此外,它还支持PX4,这是一款广泛用于无人机和移动机器人的飞行控制软件。
值得注意的是,PX4由QGroundControl补充。QGroundControl是一款用于任务规划、GPS航路点管理、遥测和测绘的地面站软件。该软件可在笔记本电脑、Android设备和定制硬件上运行,使用户能够从几乎任何地点实现全面的系统控制。
开发人员入门指南
借助Zephyr存储库的上游支持,开发人员可以轻松使用Zephyr RTOS设置MR-VMU-RT1176。
1
从恩智浦的存储库下载预配置的固件。
2
使用Zephyr构建系统编译和烧写自定义应用程序。由于支持完全集成到Zephyr中,开发人员只需遵循标准的Zephyr开源说明,并选择MR-VMU-RT1176作为目标平台。
3
利用Cognipilot的框架进行自动驾驶和自主系统开发。
移动机器人:迈向智能未来
移动机器人设计虽极具挑战性,但其发展格局完全可以重塑。
MR-VMU-RT1176为工程师提供了紧凑型、强大的解决方案,通过模块化架构,结合了高性能处理、集成传感器及广泛的连接选项。借助预构建固件、Zephyr文档及恩智浦开发资源,工程师能够快速上手。

本文作者
Altaf Hussain,恩智浦半导体运输与移动细分市场市场总监。Altaf在企业、服务提供商和工业应用的应用工程、产品营销和业务开拓方面拥有30多年的经验。他目前担任恩智浦运输与移动部门的负责人,该部门专注于移动机器人、机器视觉和仓库物流自动化领域。Altaf致力于制定系统解决方案,帮助客户借助自主移动机器人加速自动化进程。他拥有英国伦敦南岸大学的电气与电子工程学士学位。
-
mcu
+关注
关注
147文章
18604浏览量
386569 -
机器人
+关注
关注
213文章
30579浏览量
219434 -
恩智浦
+关注
关注
14文章
6051浏览量
134016 -
移动机器人
+关注
关注
2文章
801浏览量
34699 -
i.MX
+关注
关注
1文章
62浏览量
39796
原文标题:极具挑战的移动机器人设计,恩智浦的一体式VMU帮你轻松应对!
文章出处:【微信号:NXP客栈,微信公众号:NXP客栈】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
在i.MX RT 1176上正常运行代码时与使用IAR调试代码时存在一些奇怪的差异,为什么?
在MR-VMU-RT1176上运行的PX4飞行控制软件的负载(大约)是多少?
《电子发烧友电子设计周报》聚焦硬科技领域核心价值 第9期:2025.04.21--2025.04.25
恩智浦i.MX RTxxx系列MCU的特性
RT1176 SDK v2.12.1错误问题如何解决?
RT1176如何调试自定义FlexSPI配置块?
RT1176如何放大相机框架?
01:i.MX RT的市场应用和参考解决方案
恩智浦i.MX RT1170开创GHz MCU时代
恩智浦i.MX RT1170在将该系列带上了更高的层面
恩智浦推出核跨界MCU的第二款产品i.MX RT1160
恩智浦i.MX RT1060/1010上串行NOR Flash冗余程序启动设计
恩智浦i.MX RT1170 uSDHC eMMC启动时间
MR-VMU-RT1176解决方案简化移动机器人设计,并提升其性能






 工商网监
工商网监
评论