 MATLAB环境下Delat并联机器人simulnik + solidworks联合仿真(终)
MATLAB环境下Delat并联机器人simulnik + solidworks联合仿真(终)

源码链接
[https://download.csdn.net/download/a_zxswer/18855549]
联合仿真
Matlab和SW联合进行Delta机器人建模仿真,把SW模型导入Matlab中,生成仿真模型。
首先,根据Matlab版本下载Simscape Multibody Link安装文件,例如本次设计我下载的便是smlink.r2019a.zip与install_addon.m文件。
之后,用管理员权限打开Matlab,工作空间定位刚下载两个安装文件的位置;在命令行窗口中输入install_addon('smlink.r2019a.win64.zip'),进行解压安装文件,回车键确定;继续在命令行界面中输入regMatlabserver,回车键确认。
最后,激活Matlab和SolidWorks的接口,在命令行窗口界面输入smlink_linksw,回车键确认,弹出连接成功的窗口,完成在Matlab中的配置。
图4.10 导入成功文件列表
图4.11 Simulink建立的Delta机器人模型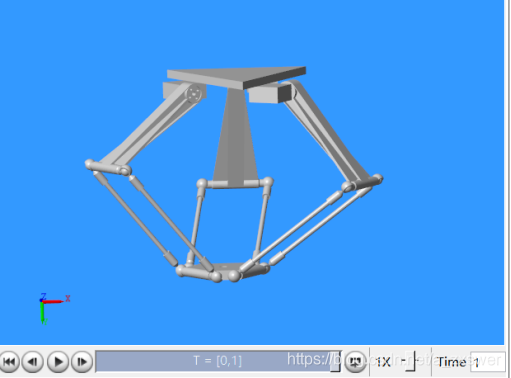
SW软件自动可以搜索电脑的接口文件,打开SW软件,Tools-Add-Ins-other Add-ins-Simscape Multibody Link打上勾并确认。选择Tools-Simscape Multibody Link-Export-Simscape Multibody选一个文件位置执行完成。回到Matlab,工作空间定位到导入模型并存有xml文件的文件的位置。在命令行窗口输入smimport('装配体.xml'),等待执行结果,如图4.10所示,弹出Simulink页面,并且生成派生的文件Delta机器人的机械模型已经转成了Simulink模型直接显示了出来,运行显示导入模型如图4.11所示,为导入成功的Delta机器人模型。下次打开只需要运行派生文件x_1_DataFile.m,即初始化导入模型的参数,之后便直接可以在Simulink中运行,实现模型建立和仿真。至此,联合建模成功,下面对Delta机器人进行动作仿真。
图4.12 Delta机器人仿真设计模块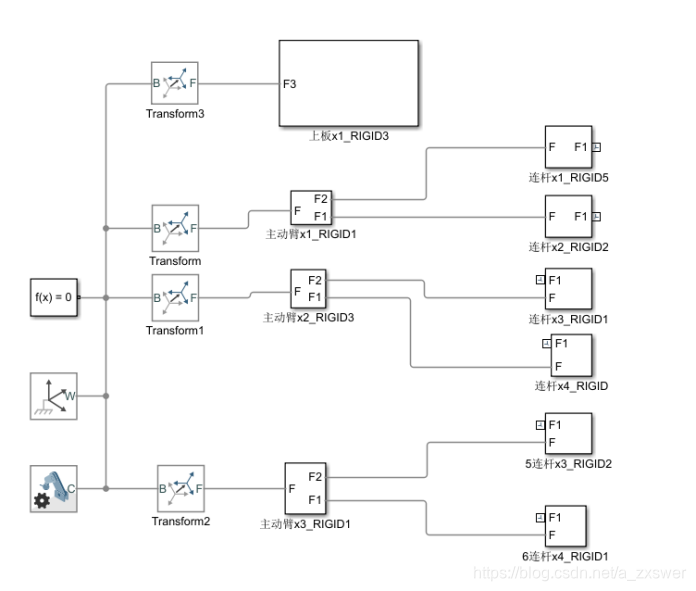
如图4.12所示,是在Simulink中设计的仿真模块,如图4.13所示的Delta机器人仿真运行界面,实现下抓、上抬动作的仿真。下面Delta机器人仿真动作的设计步骤。
第一步,运行派生的m文件,初始仿真参数;
第二步,在求解器中,建立世界坐标系,在Y轴方向设置重力,线性代数方式配置为自动,选取时间为基准的方程公式;
第三步,上板、主动臂的坐标系转换,采用任意轴的旋转方式,笛卡尔的偏量平移方式,其中轴的选取、旋转的角度、笛卡尔偏移量等参数具体数值使用的是派生文件初始化的数值;
第四步,显示上板、主动臂实体模型;
第五步,把转动副转动角度设置为180度,经过计算调试,设计各个连杆的坐标系转换参数;
第六步,显示连杆实体模型;
第七步,运行仿真模块,实现Delta机器人下抓上抬动作仿真。
图4.13 Delta机器人仿真运行界面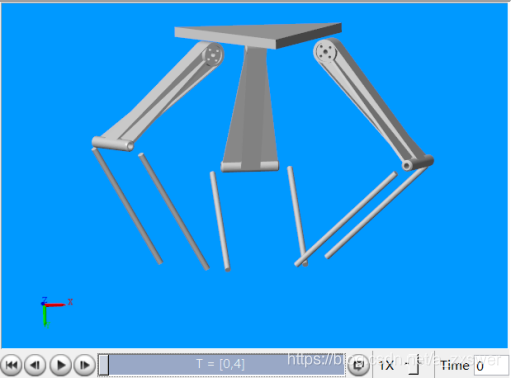
仿真方式对比分析
本次设计分别使用Matlab、SolidWorks两款软件对Delta机器人进行三种方式进行仿真,下面对三种方式分别解决的各种问题以及优缺点的做出了分析。
第一种方式,在Matlab软件中,使用m文件建模Delta机器人,完成动态模拟门行轨迹运动。优点:简化机器人的结构;易于写入运动学正反解算法;易于对不同的运动姿态和轨迹进行编程,完成对比仿真。缺点:忽视了Delta机器人从动臂的具体架构。
第二种方式,在SolidWorks中进行设计Delta机器人装配体,生成CAD图纸,进行动画模拟运动。可调试设计机器人机械模型可执行的位置姿态,验证设计图纸的可运动性,进行运动学特征分析,提供正反解分析理论依据。
第三种方式,Matlab、SolidWorks联合仿真建立Simscape模型进行仿真,对机器人下抓上抬动作进行了模拟仿真,进一步完善了上两种方式对从动臂的动作特点的分析。这种方法优势在于,创建动态系统模型,并提供一个建立模型方块图的图形用户接口(GUI);以一种更快捷、直接明了的方式进行模型和运动分析,立即看到系统的仿真结果;缺点:编程复杂,加入运动学正反解算法操作难度大。
仿真运动规划
在机器人运动学设计中,运动规划又称运动插补,是在给定的路径端点之间插入用于控制的中间点序列从而实现沿给定的平稳运动。
空间角度上的路径规划和时间角度上的轨迹规划构成了机器人运动学上的运动规划,是进行并联机器人运动分析必不可少的设计环节,两者存在递进和相辅相成的关系。
首先,必须通过分析Delta机器人的几何架构以及关节特征;进而,求出机器人的工作空间;最终,才能进行路径规划的设计。在暂不考虑机器人位姿参数随时间变化的因素的情况下,连接起点位置和终点位置的有序坐标点,构成的曲线称之为路径,构成路径的方法称之为路径规划[31]。路径是Delta并联机器人整体位置和运动姿态的一定序列,即各个关节和机械架构的空间坐标节点,其目的是找到一系列要经过的有界限的路径点,到达期望位置;我认为还应该考虑具体的机器人的机械特性和进行受力分析,设计运动关节和动力臂的路径关键运动节点处的平滑过渡,减少摩擦力和减少对伺服电机力矩和加速度过大的损伤,也是对下一步骤的轨迹规划提前进行大框架的优化。而轨迹规划是增加路径的一个时间参数,赋予运动的连续性和实时性。
本次设计,通过对Delta机器人的机械架构特征以及各个关节及各力臂之间的自由度分析,进行门行路径规划程序的编写,并完成了对门行轨迹规划的仿真。
自动分拣程序示意图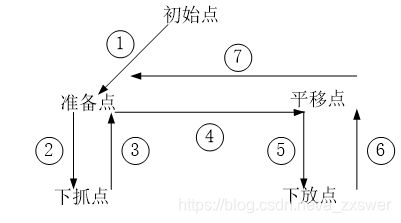
以上就是Delta机器人自动分拣的部分程序,经过多次试验,选择适合的参数,保证抓取的准确性、动作的合理性。
小结
介绍SolidWorks、Matlab软件,详述了在Matlab、SolidWorks和联合两种环境的Delta机器人动态仿真以及三种不同的仿真方式进行对比。
审核编辑 黄宇
-
matlab
+关注
关注
189文章
3033浏览量
239520 -
机器人
+关注
关注
214文章
31650浏览量
224560 -
仿真
+关注
关注
55文章
4568浏览量
138823 -
solidworks
+关注
关注
7文章
893浏览量
27417
发布评论请先 登录
基于米尔RK3576核心板的国产割草机器人解决方案
翼菲科技BAT1300-S6 Delta并联机器人重磅亮相LOGIMAT 2026
机器人环境适应性试验怎么做?需要用到哪些设备和标准?

2026 年全球五大机器人趋势 - 国际机器人联合会报告
借助NVIDIA Isaac Sim与World Labs Marble加速机器人仿真环境构建
商汤科技联合创始人王晓刚担任大晓机器人董事长
探索RISC-V在机器人领域的潜力
Delta并联机器人高速抓放应用解决方案:基于BL350与EtherCAT的硬实时控制
攻坚农业仿真挑战:Robotec农业机器人仿真平台

RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
什么是机器人?追溯机器人技术的演变和未来




评论