 无人机载合成孔径雷达系统研制手记(二):电子设计及天线
无人机载合成孔径雷达系统研制手记(二):电子设计及天线


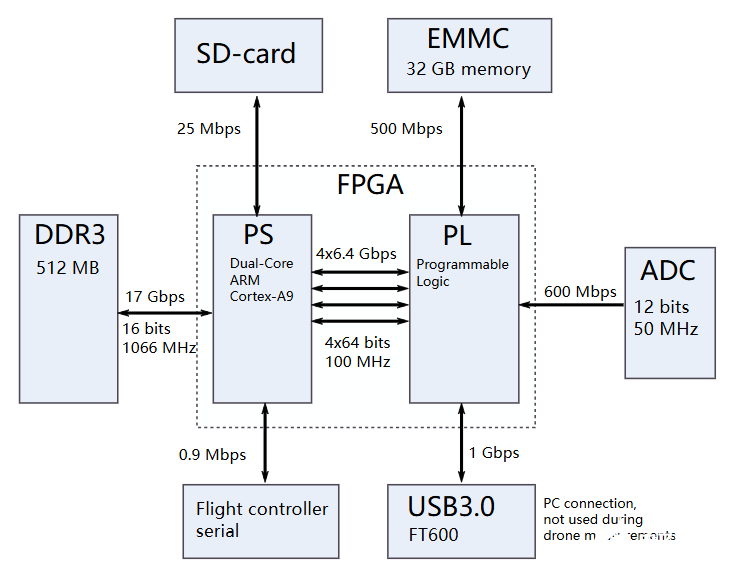
数字部分框图
面对雷达系统严苛的时序控制与海量数据处理需求,传统微控制器方案已无法满足性能要求,必须采用FPGA架构。本设计选用Zynq 7020 SoC平台,该芯片集成了可编程逻辑单元与双核ARM处理器,在过往脉冲雷达设计中已积累成熟应用经验。该型号FPGA在欧洲标准渠道报价约150欧元,而通过中国供应链可获得显著成本优势。
存储接口性能分析:
FPGA 控制器部分没有很多高速接口,SD卡与EMMC控制器理论带宽限制为25 MB/s,无法匹配ADC 50 MSPS的原始数据流
受限于无人机空间布局,1 Gbps 以太网接口无法添加树莓派或其他类似计算机资源
新型Ultrascale+系列FPGA虽支持高速存储接口(SD卡52 MB/s,EMMC 200 MB/s),但其500欧元级价格与供应链限制不适用于本项目
存储器扩展方案:
在空间约束下,DDR3模组最大容量限制为1 GB,而单次测量数据量可达数GB量级。因此必须通过可编程逻辑单元构建高速外部通信接口。幸运的是,Dan Gisselquist(ZipCPU)开发了一个GPL3许可的SD卡和eMMC控制器,其支持的高速通信模式比ARM处理器附带的硬IP更快。
冗余设计实现:
1. 双路径存储架构
SD卡连接至ARM集成控制器(25 MB/s保底带宽)
EMMC接入PL端高速控制器(基于sdspi内核)
2. 实测验证
初期对sdspi控制器的50 MB/s稳定性存疑,实际验证后确认其可靠性
保留传统接口作为应急方案,最终未启用
扩展接口设计:
集成FT600 USB3.0桥接芯片实现与PC的高速连接,该接口虽非无人机作业必需,但为实验室调试、实时监控等应用场景提供灵活扩展能力。未来版本建议将SD卡全面迁移至PL端以释放完整性能,预计可提升存储带宽至理论极限值。
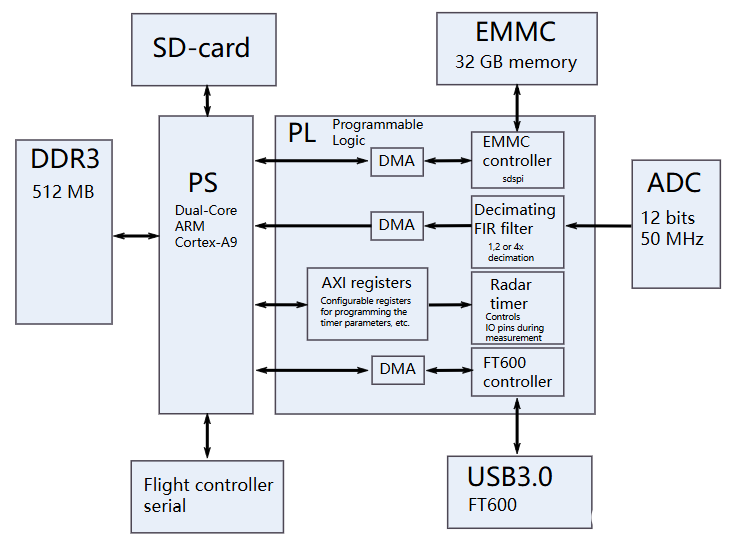
FPGA程序模块框图
在框图层面,FPGA的功能架构相对简洁。其核心设计由多个独立功能模块构成,通过DMA或AXI总线与处理器互联。对于雷达系统而言,雷达定时器模块尤为关键,其作用是在测量过程中实现内外信号的精准切换。该模块需直接部署于FPGA逻辑单元中,以确保时钟周期级的时间精度,从而保障雷达测量的相位稳定性。AXI总线在处理器端采用内存映射机制,通过向固定内存地址写入控制参数即可实现雷达系统的灵活操控。
在ADC数据输入后级联的FIR滤波器,可通过1倍、2倍或4倍抽取率动态调整采样速率。针对不同应用场景:
远距离测量:需禁用抽取功能以保留最大中频带宽,确保信号完整性
中短距测量:建议启用高倍抽取(如4倍),显著降低数据存储量并提升处理效率

此架构通过AXI总线的高效互联与FPGA逻辑资源的灵活配置,实现了雷达系统在时序精度与数据处理效率间的平衡。
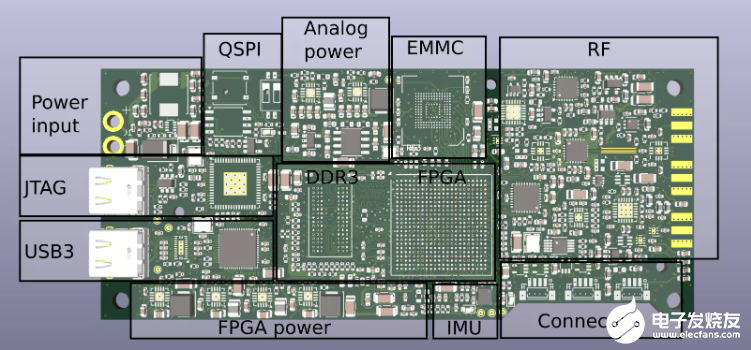
KiCad 中的3D模型
PCB 有六层,通过高密度元件布局实现空间最小化。由于单面组装比双面组装成本低,除底部需手动焊接的SD卡接口外,其余元件均集中布置于顶层。
与我以前的许多雷达一样,射频部分在 PCB 和整个设计工作中占的空间相对较小。数字器件和稳压器占据了 PCB 的大部分空间。
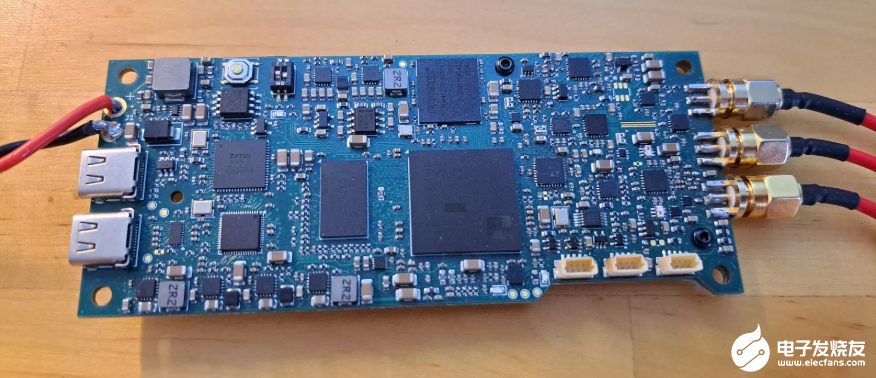
组装完的 PCB
本雷达采用宽压输入设计,直接兼容无人机电池供电系统,支持12-30V直流输入范围。通过优化电源拓扑结构,省去外置DC/TC稳压模块,显著提升系统集成度与能效表现。
由于空间有限,没有足够的空间安装四个 SMA 连接器,我也不想使用任何微型射频连接器。最上面的两个连接器是用于 H 极化和 V 极化天线输入的可切换 TX 输出,最下面的第三个连接器是 RX 输入。RX 极化开关位于外部 PCB 上,与 PCB 板右下方的三个四针 JST 连接器之一相连。另一个 JST 连接器用于连接飞行控制器的串行端口,第三个连接器目前未使用,但可用于连接 GPS 等设备。
还有两个 USB-C 连接器:一个用于 JTAG 编程和调试 FPGA,另一个连接 USB3 到 FIFO 桥接芯片,可将数据快速传输到 PC。无人机使用时不需要它,但在测试和其他应用中很有用。
PCB 尺寸为 113 x 48 毫米。宽度刚好可以装在无人机上,而长度则可以稍长一些。
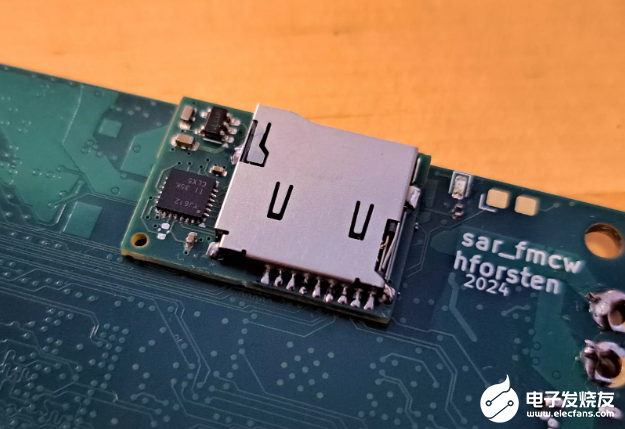 SD 卡插接 PCB
SD 卡插接 PCB
我确实犯了一个错误: 把 SD 卡的引脚误连接到 1.8 V I/O 端口,而它们应该连接到 3.3 V I/O,SD 卡在这种较低电压下无法工作。雷达可以不使用 SD 卡,而是将数据存储到 EMMC 中,然后通过 USB 读取数据,但使用 SD 卡要方便得多。我真的不想再订购一块 PCB 来弥补这个错误,于是我设计了一块带有电平转换器的小型插接 PCB,焊接在之前的 SD 卡封装上,从而弥补了这个错误。
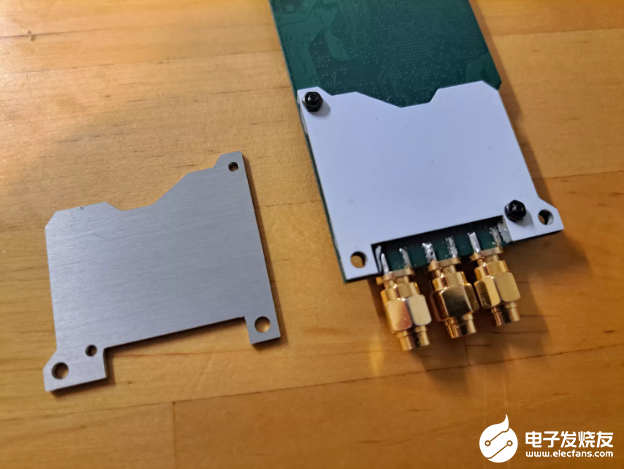
雷达 PCB 下的铝制 PCB 散热器
如果发射占空比较高,功率放大器会变得很热。为了保持低温,我订购了定制的铝基板 PCB,用螺栓固定在雷达 PCB 板下面。在功率放大器下面去掉阻焊层,在 PCB 和散热片之间放置隔热垫。5 块电路板只花了 4 美元,而且效果很好。
无人机电子系统
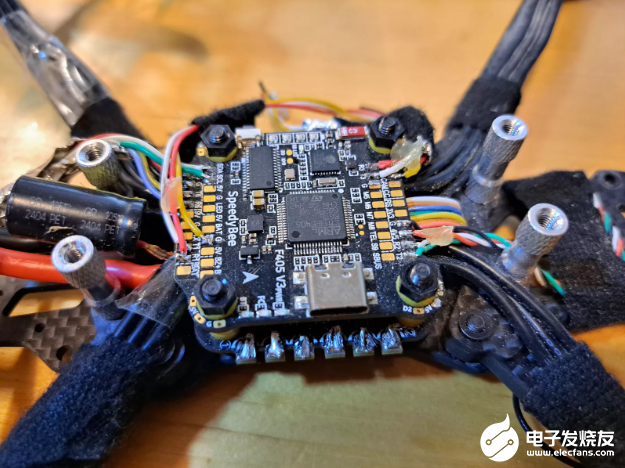
Speedybee F405 V3 飞行控制器
无人机套件附带飞行控制器。附带的飞行控制器是 Speedybee F405 V3。这是一款廉价的低端飞行控制器,只有 1 MB 闪存。它能胜任工作,但我还是建议购买更好一点的飞行控制器,闪存容量为 2 MB,价格相差不大。
有几种可能的飞行控制器软件。FPV 无人机最常用的有三种: Betaflight、Inav 和 ArduPilot。它们的主要区别在于 Betaflight 侧重于快速响应的手动飞行,不支持自主飞行;Inav 与 Betaflight 共享大量代码,也包括一些自主飞行支持;ArduPilot 具有最先进的自主飞行能力,功能丰富,但配置起来更具挑战性。
我选择使用 Ardupilot,发现它在这方面非常出色。它有非常好的 IMU 和 GPS 传感器融合算法,对提高定位精度很有帮助。飞行控制器可以通过串行端口与雷达通信,从而在自主飞行任务期间启用或禁用雷达,并为雷达提供位置信息。
 集成指南针的 GPS。它需要安装在远离电池导线的地方,以避免磁场对指南针造成影响。
集成指南针的 GPS。它需要安装在远离电池导线的地方,以避免磁场对指南针造成影响。
合成孔径雷达 SAR 成像需要非常精确的位置信息,以实现正确的图像聚焦。定位信息应精确到波长的几分之一,在此频率下仅为几厘米(1 - 2 英寸)。许多商用合成孔径雷达成像无人机使用 RTK GPS,并在地面上安装第二个固定 GPS 接收机,可以获得约 1 厘米的精确定位。缺点是成本比普通 GPS 高得多,而且 RTK GPS 接收机通常比普通 GPS 接收机大得多,很难安装在无人机上。
好的非 RTK GPS 定位精度可能在1米左右。如此大的定位误差如果不加以纠正,会对图像造成很大误差。幸运的是,可以通过雷达数据解决定位误差问题,这就是所谓的自动对焦。自动对焦的缺点是需要在图像形成过程中进行更多处理,但也可以使用普通 GPS。与惯性测量单元(IMU)进行传感器融合可提高定位的准确性,获得位置更新的速度也比仅使用 GPS 时的最高约 4 Hz 更快。
要实现自主飞行,无人机的飞行计算机还需要 GPS、IMU 和指南针。如果为雷达单独再配备一套GPS和IMU,不仅会浪费空间,而且没有必要。因此我依靠飞行计算机通过串行接口向雷达输出其位置估计值。
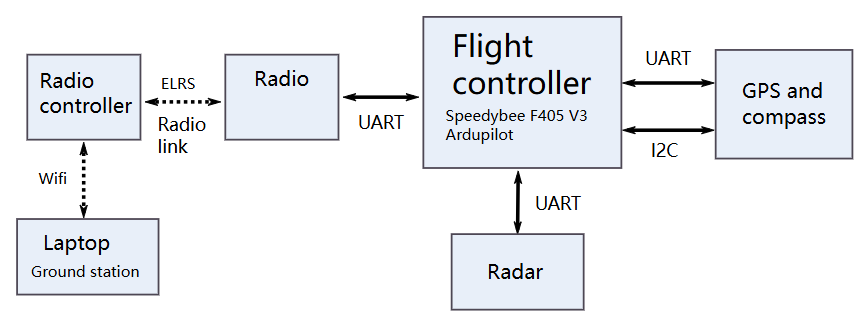 无人机框图 无人机通过无线电遥控器进行操控。我使用的是 FPV 无人机常用的 ExpressLRS 无线电链路。无人机还通过无线电与电脑上运行的地面控制软件连接。该软件可用于编程自主任务参数、更改无人机设置、控制无人机以及在飞行过程中显示遥测数据。地面站还可以通过飞行控制器向雷达发送信息,这样就可以通过笔记本电脑对雷达参数进行编程。 近期,ExpressLRS(ELRS)增加了对Mavlink的支持,这使得可以使用单一的无线电设备来同时实现无线电遥控器和遥测通信的功能。这种改进大大简化了无人机的通信系统架构,减少了设备数量和成本,同时也降低了通信干扰的可能性,提高了通信的可靠性和稳定性,对于无人机的飞行控制和数据传输来说是非常便利的,尤其在一些对通信效率和稳定性要求较高的应用场景中,这种改进的优势更加明显。
无人机框图 无人机通过无线电遥控器进行操控。我使用的是 FPV 无人机常用的 ExpressLRS 无线电链路。无人机还通过无线电与电脑上运行的地面控制软件连接。该软件可用于编程自主任务参数、更改无人机设置、控制无人机以及在飞行过程中显示遥测数据。地面站还可以通过飞行控制器向雷达发送信息,这样就可以通过笔记本电脑对雷达参数进行编程。 近期,ExpressLRS(ELRS)增加了对Mavlink的支持,这使得可以使用单一的无线电设备来同时实现无线电遥控器和遥测通信的功能。这种改进大大简化了无人机的通信系统架构,减少了设备数量和成本,同时也降低了通信干扰的可能性,提高了通信的可靠性和稳定性,对于无人机的飞行控制和数据传输来说是非常便利的,尤其在一些对通信效率和稳定性要求较高的应用场景中,这种改进的优势更加明显。
天线
理论上,天线波束宽度越宽,SAR图像的分辨率就越高。SAR成像领域的一个著名结论是:在条带模式SAR(固定天线角度和直线基线)中,最佳横向分辨率可达L/2,其中L为天线长度。然而在实际应用中,更宽的波束未必更好。宽波束意味着更低的增益,这会降低信噪比并限制最大探测距离。由于天线增益在链路预算中是平方关系,当天线增益减半时,需要将脉冲数量增加四倍才能保持相同信噪比。
横向分辨率取决于目标可见的基线长度,而天线波束越宽该基线越长。在聚束成像模式(天线持续跟踪目标)下,横向分辨率不再受限于天线波束宽度,且无人机平台更易实现聚束成像。对于无人机SAR系统,最大可用基线长度常成为分辨率的主要限制因素,因为受限于视距飞行难以实现超长航迹。
聚束成像模式(或天线波束始终覆盖目标的条带模式)下的方位角分辨率可近似为:Δθ≈λ/L,其中λ为波长,L为航迹长度。横向分辨率可通过Δy=2rsin(Δθ/2) 计算,r为目标距离。
无人机SAR面临的主要挑战是如何在有限空间内安装足够大的天线。由于采用FMCW雷达,需要独立的发射和接收天线,这进一步压缩了单天线的可用空间,同时低发射-接收泄漏要求需要保持一定间距。
我曾使用自制喇叭天线,但其尺寸(总长100mm,仅同轴-波导转换器就达25mm)无法适配螺旋桨间距仅50mm的无人机平台。虽然原喇叭天线未实现双极化,但通过正交90度的双馈源可轻松实现双极化设计。
贴片天线因采用PCB覆铜工艺可实现小型化,同样可通过正交双馈源实现双极化。但1.6mm厚FR4基板的简单贴片存在带宽窄(FR4介质参数偏差易致频偏)、增益低等缺陷。虽然阵列设计可提升增益,但FR4基板的馈电网络损耗会显著增加。
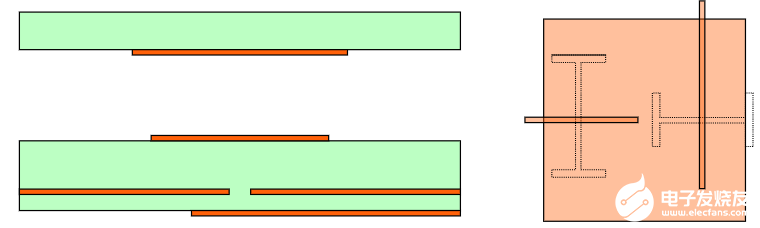
叠层孔径耦合贴片天线。侧视图(左)和俯视图(右)
在阅读了一些科学论文后,我发现了这篇双极化槽馈叠层贴片天线论文。它由贴片天线组成,贴片天线由微带线馈电,微带线通过地平面上的 H 型槽与贴片耦合。可以使用两条馈电线和相距 90 度的槽来实现双极化。第二个贴片悬挂在离第一个贴片几毫米远的地方,中间夹着空气。与单个贴片相比,这种结构能获得更宽的带宽,因此能承受因 FR4 介电常数不准确而引起的频率偏移。第二个贴片还能略微提高增益。
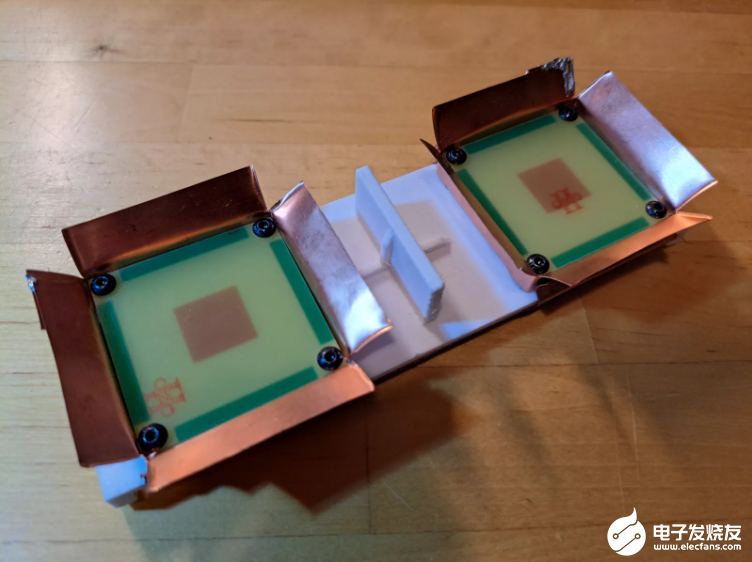
发送和接收贴片馈电喇叭天线
然而,更高的增益有助于提升信噪比。90度方向的旁瓣也应进一步抑制以降低发射-接收泄漏。为此,我在天线外围增设了金属板喇叭结构,形成叠层贴片馈电喇叭天线。该设计使天线高度增加10毫米,但实验发现仅环绕贴片间隙的金属板包裹结构(不增加高度)也能有效提升增益并抑制旁瓣。虽然尚未在文献中发现类似结构,但考虑到其设计直观性,类似方案可能早已存在。
相较于当前四瓣式设计,采用填充边角的金字塔形喇叭可能在增益和机械强度方面略有优势。但现有方案更便于手工制作——我使用剪刀手工裁剪铜片并通过焊接完成组装。
该天线完美满足所有需求:双极化特性、超宽带宽、高增益、相比同增益的同轴-波导馈电喇叭天线更薄型化,且制造成本低廉(仅需两块FR4电路板、少量铜片及紧固件)。若采用低损耗射频材料(如罗杰斯RO4350B),增益预计可提升0.5-1.0 dB,但原型阶段成本将激增百倍,性价比过低。
天线间设置的0.25×0.5波长微型隔离墙有效降低了收发耦合。经多尺寸测试验证,该微型隔离墙的效果优于无隔离墙方案及更高墙体方案。
不计SMA接头时,天线总高度为18毫米(其中喇叭结构占10毫米)。含SMA接头的总高度为28毫米。贴片基板尺寸为45×45毫米,喇叭开口尺寸为65×65毫米。

天线背面。每根天线都有两个 SMA 接头,一个用于 H 极化,另一个用于 V 极化
天线背面覆盖铜箔以抑制后向辐射。这一设计至关重要,因为天线直接安装在无屏蔽的雷达PCB板正上方。若无屏蔽措施,发射天线的后向辐射将加剧收发通道耦合。此外,在收发天线隔离墙内嵌铜箔(通过胶带固定),进一步增强了隔离效果。
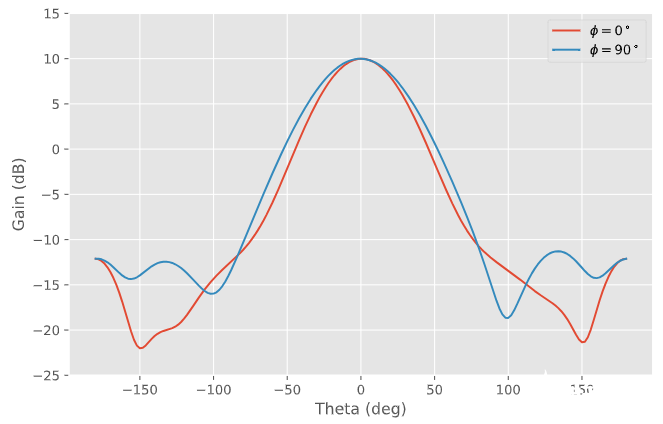
天线的模拟辐射模式
仿真结果显示:在0°/90°方向上,天线-3 dB波束宽度分别为50度/60度。H/V馈电槽呈90度正交布局,两端口辐射方向图形态相似但空间取向正交。仿真峰值增益达10.0 dB。
90度方向旁瓣抑制约-10 dB,这对降低收发泄漏至关重要。由于天线辐射方向图存在非对称性,将另一副天线旋转90度安装可确保HH与VV极化间的方向图匹配度。当发射天线通过首端口发射H极化波时,接收天线通过另一端口接收H极化波,V极化同理,从而保证两种同极化模式的双程方向图匹配。然而在交叉极化(HV/VH)模式下,由于收发共用同端口,其方向图特性与同极化模式存在差异。
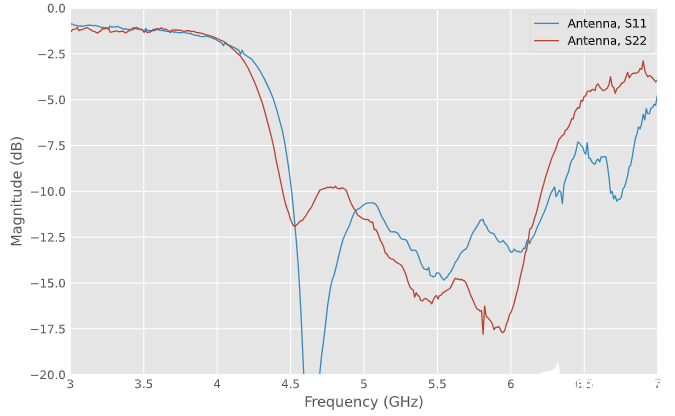
测量的天线 S 参数
由于耦合槽尺寸略有不同,H 端口和 V 端口的匹配略有差异。天线的可用带宽约为 4.5 千兆赫至 6.2 千兆赫,对这一应用来说绰绰有余。
原文转载自 https://hforsten.com/homemade-polarimetric-synthetic-aperture-radar-drone.html,已进行翻译及校对优化
注意:如果想第一时间收到 KiCad 内容推送,请点击下方的名片,按关注,再设为星标。
常用合集汇总:
和 Dr Peter 一起学 KiCad
KiCad 8 探秘合集
KiCad 使用经验分享
KiCad 设计项目(Made with KiCad)
常见问题与解决方法
KiCad 开发笔记
插件应用
发布记录
审核编辑 黄宇
-
无人机
+关注
关注
237文章
11382浏览量
196708 -
雷达系统
+关注
关注
7文章
262浏览量
29622
发布评论请先 登录
简析当下无人机激光雷达行业的技术瓶颈

纳雷科技推出无人机雷达高精度旋转平台
无人机定高雷达升级历程

新规落地后无人机起飞不难,如何通过3225封装确保特种无人机系统稳定运行?


禾赛科技固态激光雷达获美团无人机量产定点 计划2026年交付
一文读懂无人机的“心脏”-电机

无人机智能巡检系统的技术特点与应用优势
离轴技术:赋能无人机精准配送的核心芯片应用
Vicor电源模块在高空长航时无人机的应用
RK3576赋能无人机巡检:多路视频+AI识别引领智能化变革
科普|无人机反制枪介绍




评论