 GaN FET在人形机器人中的应用
GaN FET在人形机器人中的应用

从科幻走入现实,人形机器人正经历一场静默而深刻的技术革命:更高效的能源控制、更精准的运动算法、更高速的通信架构、更智能的环境感知能力......这些变革正在重塑机器人的“骨骼”、“神经”与“感官”。
欢迎来到
《人形机器人专题》
我们将为大家带来四篇系列文章
从不同方面对人形机器人进行知识解析
本文将聚焦GaN FET在人形机器人中的应用
引言
人形机器人集成了许多子系统,包括伺服控制系统、电池管理系统 (BMS)、传感器系统、AI 系统控制等。如果要将这些系统集成到等同人类的体积内,同时保持此复杂系统平稳运行,会很难满足尺寸和散热要求。人形机器人内空间受限最大的子系统是伺服控制系统。为了实现与人类相似的运动范围,通常在整个机器人中部署大约 40 个伺服电机 (PMSM) 和控制系统。电机分布在机器人身体的不同部位,例如颈部、躯干、手臂、腿、脚趾等。该数字不包括手部的电机。为了模拟人手的自由操作,单只手即可能集成十多个微型电机。这些电机的电源要求取决于所执行的具体功能;例如,驱动机器人手指的电机可能只需要数安培电流,而驱动髋关节或腿的电机可能需要 100 安培或更高的电流。
与传统伺服系统相比,人形机器人的伺服系统具有更高的控制精度、尺寸和散热要求。本文介绍了GaN(氮化镓)技术在电机驱动器中的各种优势,并展示了GaN 如何帮助解决人形机器人中伺服系统面临的挑战。
更精确的控制
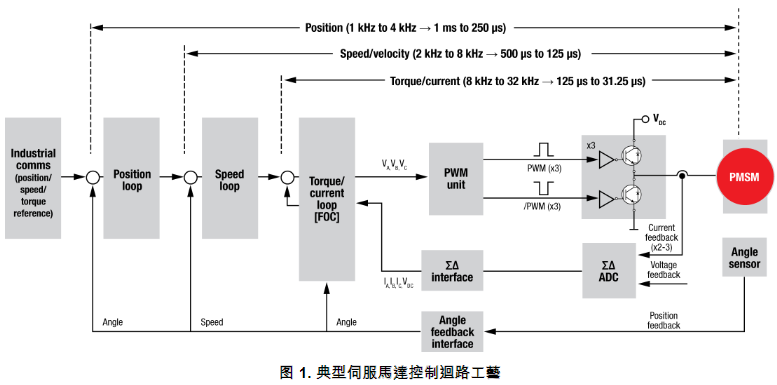
在伺服电机驱动应用中,电机控制通常分为几个控制回路层:电流/扭矩回路、速度回路、位置回路和更高级别的运动控制回路。这些回路通常以级联的形式排列,每个回路都有“实时”处理要求。电流/扭矩回路是速度最快的控制回路。每个上游回路以其之前回路的倍数运行,并为下游回路提供输入参考。图 1显示了典型的级联控制拓扑。
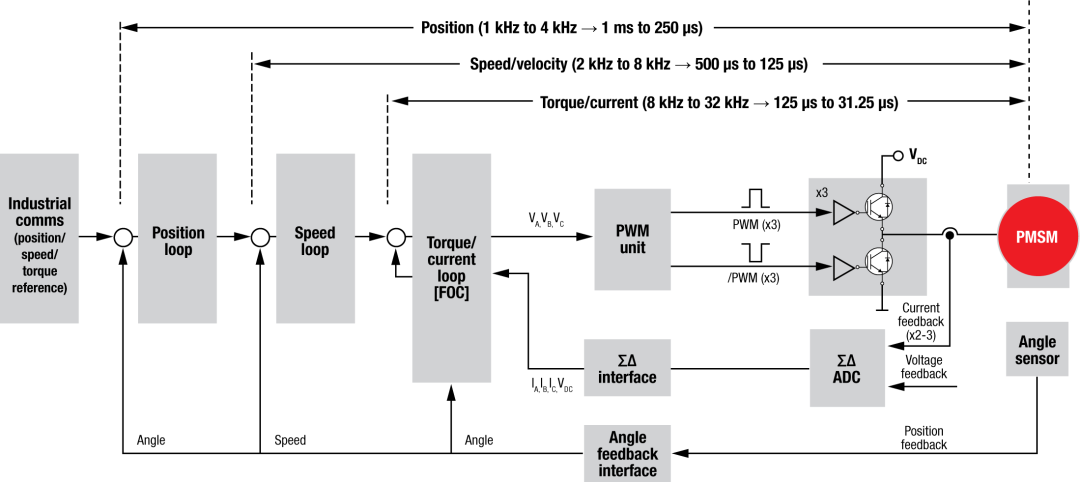
图 1:典型的伺服电机控制回路技术
控制回路最重要的部分是电流回路。通常,FET 开关频率与电流回路相同,约为 8kHz 至 32kHz。电流回路的速度直接影响电机控制的精度和响应速度。人形机器人的一个简单动作涉及多个伺服电机的控制。为了协调机器人身体中的近 40 个电机,同时保持系统的稳定性,每个关节的控制精度和响应速度必须满足非常高的要求。可通过提高电机控制回路的速度和 PWM 频率来满足这些要求。例如,100kHz (图 2) 的开关频率可以实现分辨率更高的电机电流,从而实现更小的电机电流纹波和更精确的控制。高分辨率电机电流波形也意味着可以获得更好的正弦电流,这可以提高电机的运行效率并减少电机发热。
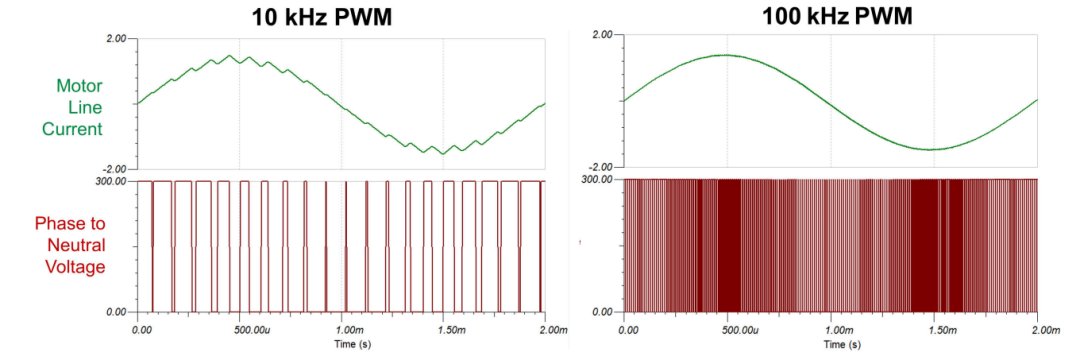
图 2:100kHz 和 10kHz PWM 电机电流
此外,增加 PWM 开关频率可以减小 DC 总线电容器的尺寸和电容。对于要替换为陶瓷电容器的电解电容器,需要满足的总线电容要求降低。伺服功率级 FET 通过 PWM 信号定期从总线电容器汲取电流。当 PWM 频率增加时,每个单位时间消耗的电荷量减小,这意味着所需的总线电容减少。根据TIDA-010936的测试,将 PWM 频率从 20kHz 提高到 80kHz 后,可以用电容相等的陶瓷电容器代替电解电容器,以获得相似的总线电压纹波。与电解电容器相比,陶瓷电容器具有明显优势:更小的尺寸、更长的使用寿命、更好的高频特性等。
因此,在设计人形机器人时必须考虑速度更高的电流回路和更高的 PWM 频率。对于 MOSFET 型伺服驱动器,PWM 开关频率的增加会带来很大的额外损耗,从而导致驱动器严重发热。当开关频率从 10kHz 增加到 20kHz 时,MOSFET 型驱动器会让总体损耗增加 20%至 30%,这对于人形机器人是不可接受的。此外,GaN FET 在高频下具有较低开关损耗。在TIDA-010936测试中,电路板损耗在 40kHz 和 80kHz 下几乎相同,因此GaN 特别适合高开关频率场景。
图 3:TIDA-010936 电路板在 48V 输入电压下的损耗与三相输出电流间的关系
减少开关损耗
GaN 之所以能够实现如此低的开关损耗,源于 GaN 器件的特性。GaN 器件具有更小的栅极电容 (CG) 和更小的输出电容 (Coss),可实现达到 Si-MOSFET 100 倍的开关速度。由于关断和开通时间缩短,可以在较短的范围内控制死区时间,例如 10-20ns,而 MOSFET 通常需要约 1us 的死区时间。死区时间的缩短可降低开关损耗。此外,GaN FET 没有体二极管,但续流功能通过第三象限操作实现。在高频 PWM 场景中,MOSFET 的体二极管会导致较大的反向恢复损耗(Qrr 损耗)。第三象限操作还可避免开关节点响铃和由体二极管引起的 EMI 风险,从而降低对高功率密度人形机器人中其他器件的干扰。
尺寸更小
人形机器人的关节空间有限。电源板通常是直径为 5-10 cm 的环形 PCB。此外,关节必须集成电机、减速器、编码器甚至传感器。重要的是,设计人员必须在有限的空间内实现更高的功率和更稳定的电机控制。与 MOSFET 相比,GaN 具有更小的 RSP(比电阻、裸片面积尺寸比较),这意味着与具有相同 RDSon 的 MOSFET 相比,GaN 具有更小的裸片面积。德州仪器 (TI) 通过集成 FET 和栅极驱动器进一步减小了占用空间。这样可以实现 4.4mΩ 半桥 + 栅极驱动器,并且封装仅为 4.5 x 5.5mm。
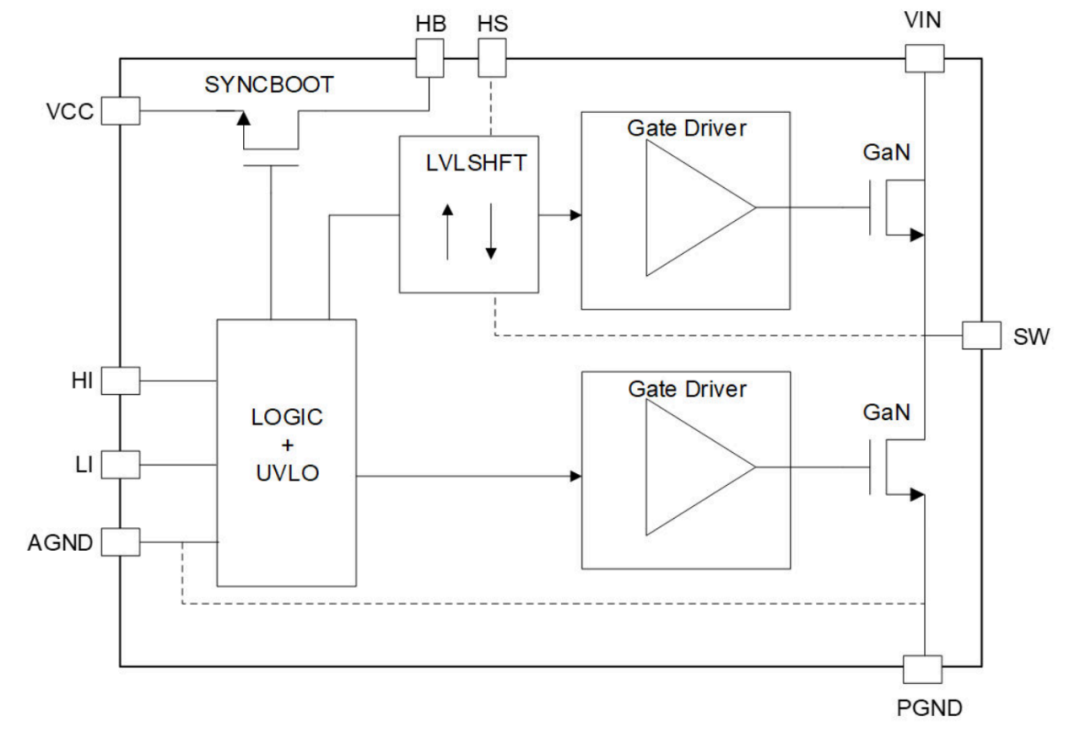
图 4:LMG2100 方框图
以LMG2100R026为例。该器件集成了半桥的 FET 和半桥驱动器,可承受 55A 的持续电流。将驱动器与 FET 集成有许多优势,包括:
减少了栅极响铃,让运行更可靠
减小了电源回路电感并且优化了封装尺寸
通过集成栅极驱动器减小了尺寸
通过集成的保护功能保护器件
为了在设计中比较 GaN 和 MOSFET,我们可以查看提供类似功率级别的TIDA-010936和TIDA-01629设计。如图 5所示,由于集成了栅极驱动器并降低了 GaN 的 RSP,整个功率器件的芯片面积减小了 50% 以上。
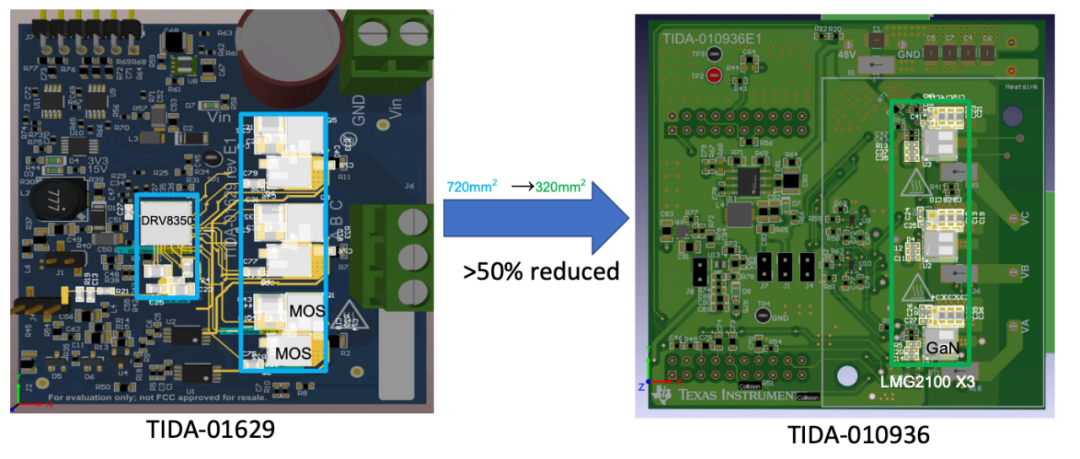
图 5:GaN 与 MOSFET 功率级比较
总结
人形机器人对控制精度和功率密度的要求较高。GaN 可以在高 PWM 频率下以低损耗轻松实现更高精度的电机控制。GaN 的高功率密度特性与德州仪器 (TI) 的集成式驱动器的特性相结合,可进一步减小尺寸。由于这些优势,GaN 型电机驱动器可能会成为人形机器人的首选设计,带来更高效、更稳定和更智能的机器人设计。
除了人形机器人之外,GaN 技术也是其他类型机器人(协作机器人、外科手术机器人、AGV)、工业伺服系统、家用电器和其他需要高功率密度的应用的理想选择。
-
伺服电机
+关注
关注
88文章
2200浏览量
61575 -
FET
+关注
关注
3文章
908浏览量
66812 -
GaN
+关注
关注
21文章
2385浏览量
84485 -
人形机器人
+关注
关注
7文章
1060浏览量
18544
原文标题:人形机器人 | GaN FET 在人形机器人中的应用
文章出处:【微信号:tisemi,微信公众号:德州仪器】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
人形机器人中的电流检测方法
伺服电动缸在人形机器人中的应用
为什么人形机器人更讨人喜欢?
有人玩过人形机器人吗?
现代机器人中有什么传感器?
工业机器人中面对的控制问题是什么
Nadia在人形机器人中如何独树一帜
步进电机在工业机器人中的应用
FUTEK传感器在人形机器人中的应用
变速齿轮在机器人中的使用
探讨 GaN FET 在人形机器人中的应用优势
石英晶振在人形机器人中的应用
石英晶振在人形机器人中的应用




评论