 相机的成像原理及主要参数
相机的成像原理及主要参数

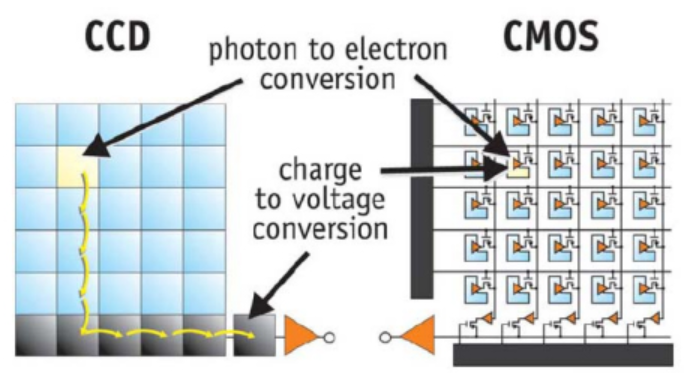
我们常见的相机芯片主要由硅材料组成,主要分为CCD和CMOS两大类。他们主要是读出方式的不同。相机成像原理如下,从光子到数字化图片的过程——主要分为四个步骤:光子到电子的转化、电子到电压的转换,模数转换,后期处理。
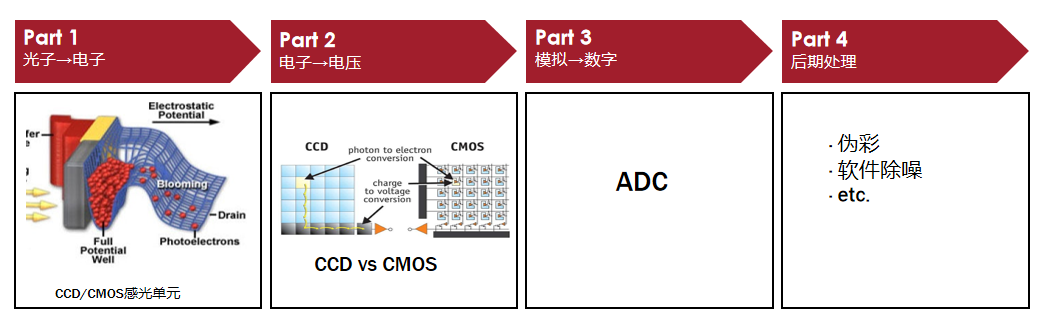
CCD与CMOS主要区别在于电子到电压的转换过程中,CCD是像素统一读出,CMOS是每个像素单独读出。这一区别也决定了CCD和CMOS相机各有优劣。在过去,由于CCD的像素一致性好,占据大部分高端市场;近年来,CMOS芯片技术已取得巨大进步,在很多方面已超越CCD,从2010年开始sCMOS相机开始大规模商业化,凭借高速度(帧速率)、高分辨率(像素数)、低功耗以及最新改良的噪声指数、量子效率及色彩观念等各方面优势,CMOS芯片逐渐在CCD芯片主导的领域里占据了一席之地。
相机主要参数
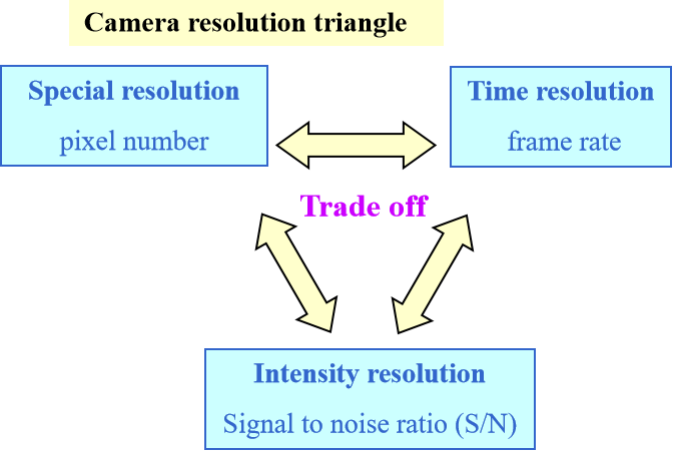
▶ 分辨率
相机的像素数目,也就是空间分辨力,分辨率越高,分辨样品中的微小结构能力就越强。
▶ 帧数
对应的相机的时间分辨能力,相机每秒可以采集多少张照片,帧数越高获得样本信息越全。
▶ 灵敏度
对应强度分辨能力,也就是信噪比。
以上三个参数属于鱼和熊掌不能兼得,相互制约得关系。
▶ 噪声
前面我们提到了灵敏度,也就是信噪比。通俗来讲信噪比等于信号强度比上噪声的比值,比值越大灵敏度越高,信噪比越好。
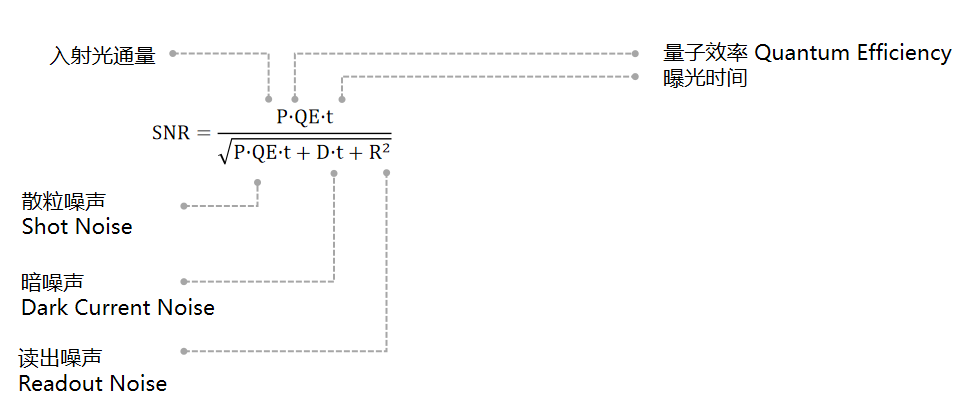
以上是信噪比的计算公式,其中主要包括三大类噪声,散粒噪声,暗噪声,读出噪声。
1)散粒噪声:散粒噪声是信号本身的噪声,属于统计学上的噪声,和真实信号的强度相关,如果是弱光探测,散粒噪声可以忽略不计。
2)暗噪声:暗噪声是暗电流产生的散粒噪声,主要由于像素感光材料热电子运动产生。长时间曝光(积分)时,芯片温度会增高,暗电流会越大,相应的暗噪声会增大,这个时候暗噪声对图像质量的影响比较大,一般采用风冷和水冷方式进行制冷来降低暗噪声。对于同一芯片,近似的规律是温度每下降10度,暗电流减小一半。
3)读出噪声:读出噪声的来源是电子转换成电压的过程产生的,与帧数密切关,读出速度越快读出噪声越高。值得注意的是如果曝光时间在1s以上,主要噪声来源于是暗噪声和信号的散粒噪声。如果是1s以下的曝光时间,主要噪声来源于读出噪声。
▶ 满阱容量
每个像素可以容纳的电子数。由传感器决定,在强光条件下,高满阱可防止图像过曝。
▶ 位深
位深实际是灰度值表示,位深越大,图片越精细。
▶ 动态范围
表示相机对强光和弱光同时分辨的能力,动态范围越大,就可以探测更宽的光强范围,图像细节更丰富。动态范围是满阱与噪声的比值 DR=满阱容量(S)/噪声(N),也可以用分贝表示:DR=20×log(满阱容量(S)/噪声(N))
▶ 像素合并(Binning)
Binning通过牺牲分辨率来提升信噪比。CCD的binning是像素读出的过程中,电荷转移时候实现的物理上的合并,合并后读出噪声与原来相同,因此信噪比成倍增加,参与Binning的像素数与信噪比成线性关系。Binning也能提高CCD相机的帧数。CMOS的binning是在A/D转换后,也就是说CMOS在binning时并没有物理上电荷合并,而且像素进行量化后,数字信号的合并。但是每个像素读出噪声也会被合并,CMOS的binning也会提升信噪比,但是不同于CCD,CMOS提升的是N0.5倍数,而且Binning提高不了帧数。
▶ 像素一致性
像素一致性是指每个像素点的成像差异,用PRNU(光响应不均匀性)和DSNU(暗噪声不均匀性)表示
▶ 快门方式
相机主要是两种快门方式:Rolling shutter(卷帘门快门)和Global shutter(全局快门)
审核编辑 黄宇
-
成像原理
+关注
关注
0文章
5浏览量
8336
发布评论请先 登录
浮思特 | 从原理到应用:红外热成像相机如何重塑智能检测与感知能力

实际应用成像下了解工业镜头的选型参数——视角(AOV)

电磁流量计的主要参数及调整方法,常见类型

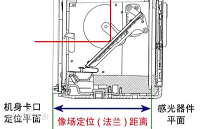
法兰距离:相机镜头系统的关键参数
黑白相机与彩色相机的成像优势分析以及常见的误区说明

工业相机的镜头参数在行业最新标准中是如何解释的

什么是快照式光谱成像相机?

电磁流量计的主要参数及调整方法
浮思特 | 手机红外热成像相机原理,看不见的“温度世界”

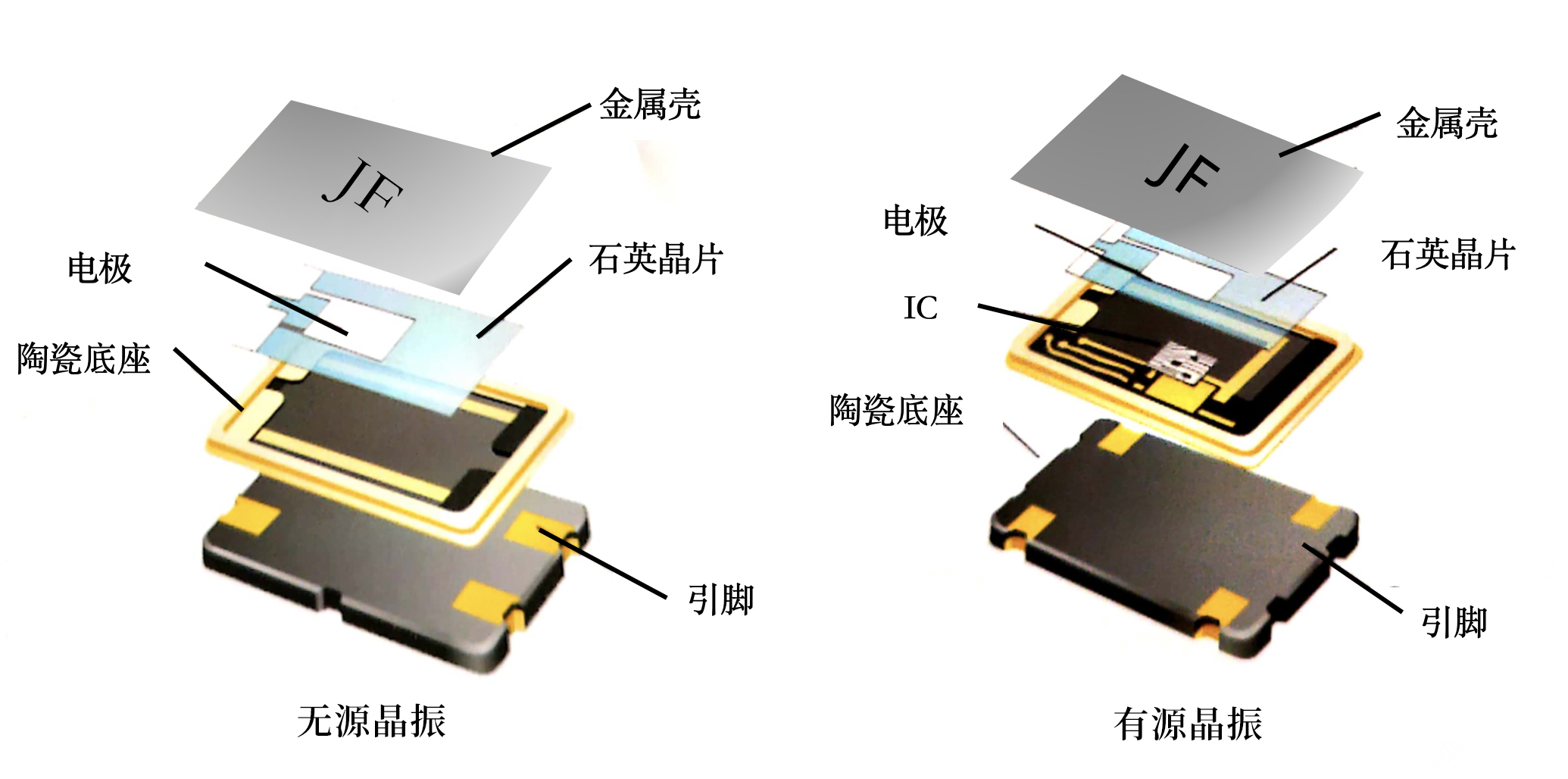
晶振的主要参数有哪些

紫外工业相机的主要应用

Spinnaker 4 SDK助力扩展多相机成像系统




评论