 人形机器人关节的磁编码器理想选择——AS5048 产品介绍
人形机器人关节的磁编码器理想选择——AS5048 产品介绍

人形机器人作为另一个颠覆性产品赛道,在满足社会发展需求的背景下迎来了巨大的发展机遇。预计到2035年,人形机器人市场将保持50%以上的高增速发展,全球需求总量将达到100-200亿台,为人形机器人开辟了巨大的市场空间。
作为关键组件之一的传感器,其性能直接影响到机器人的精度、稳定性和响应速度。AS5048是一款高精度的磁编码器,因其卓越的性能和多功能性,成为人形机器人市场的理想选择。
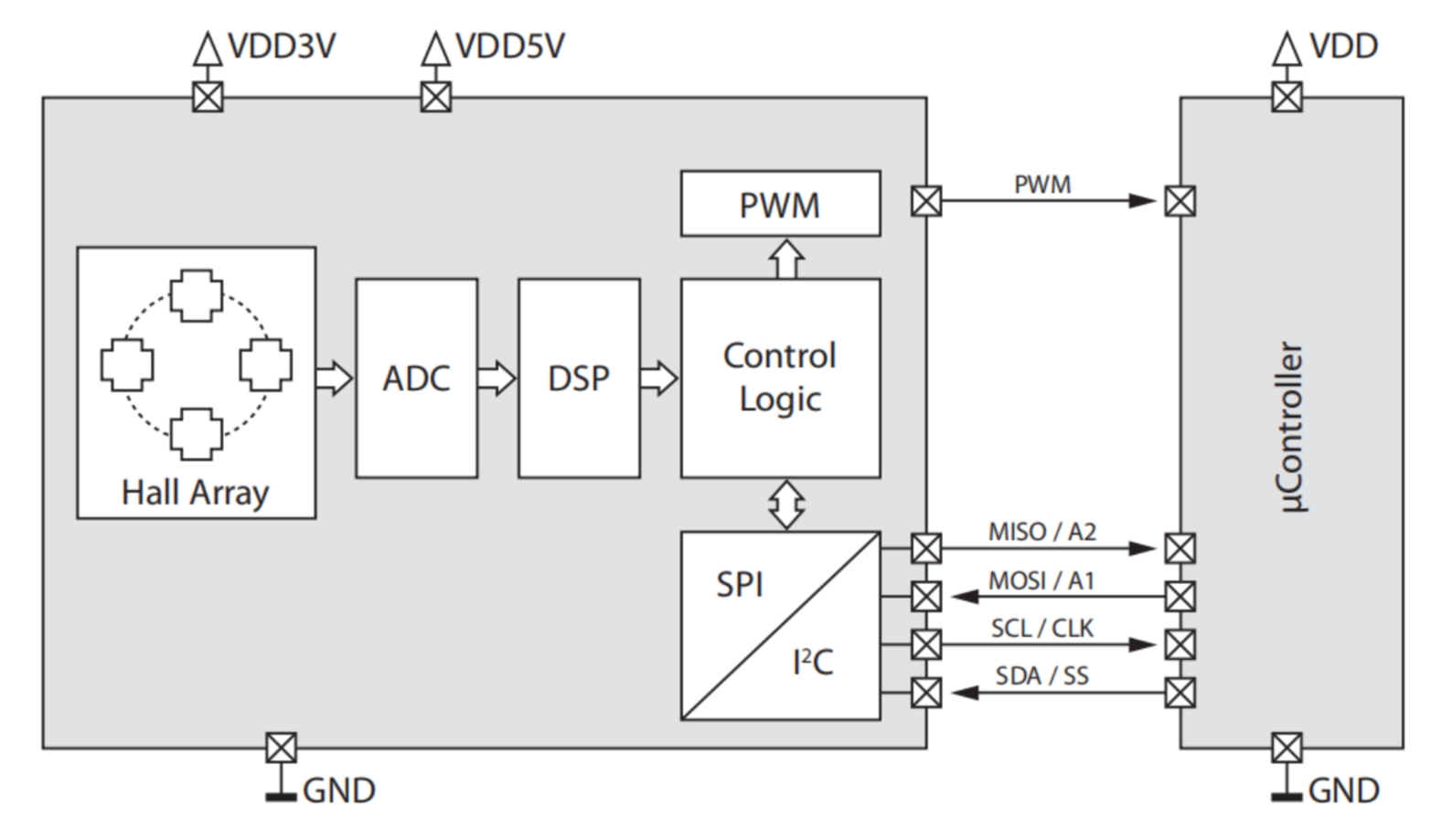
AS5048是易于使用的360° 角度位置传感器,具有14位高分辨率输出。系统精度最高可达0.05°(线性化及平均值由外置微控制器计算情况下)。传感器IC由霍尔传感器、模拟数字转换器和数字信号处理器组成,可测量磁铁旋转角度的绝对位置。
零位位置可通过SPI或I²C指令进行编程设置,无需编程器。由于磁铁零位位置无需机械校正,简化了整个系统组件的组装,帮助开发人员减少开发时间。AS5048可免受磁铁安装位置偏差、气隙变化、温度变化以及外部磁场的干扰的影响。
AS5048稳健性和较宽的运行温度范围(-40°C至150°C)使其成为恶劣工业和医疗环境中旋转角度感测的理想选择。部分AS5048 IC可以菊链连接,进行串行数据读取。
磁铁的绝对位置信息可通过PWM输出直接获得,并可同时通过标准SPI或高速I²C接口读取。AS5048A配有SPI和PWM接口。AS5048B配有I²C接口以及PWM输出。AS5048的内置电压调节器使其可在3.3V 或5V电压下运行。
应用
机器人
- 电机控制和关节位置检测
工业
医疗
- 外科手术机器人
- 注射泵
- 健身器材
特点
- 360°非接触式角度位置传感器
- 标准SPI或高速I²C接口和PWM
- 通过SPI或I²C指令可设置零点位置
- 无需编程器
- 14位分辨率:0.0219°/ LSB
- 系统线性及平均化后角度精确度达0.05°
- 可进行菊链连接
- 磁场输入范围:30mT-70mT
- 运行温度 -40°C至125°C
- 非接触传感的高可靠性
- 可抗外部杂散磁场干扰
- 兼容3.3V / 5V电压
- 14-pin TSSOP封装
产品框图
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
AS5048
+关注
关注
0文章
3浏览量
7681 -
人形机器人
+关注
关注
7文章
1102浏览量
18572 -
磁编码器
+关注
关注
0文章
156浏览量
6696
发布评论请先 登录
相关推荐
热点推荐
人形机器人关节扭矩传感器的详细应用场景及解决方案
机器人、精密装配手部关节(需<0.001Nm分辨率)。
优点 :无机械迟滞,极高分辨率。
缺点 :成本高,对污染敏感,结构复杂。
方案4:电流环+关节双编码器间接估计(无额外扭矩
发表于 05-20 17:40
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
“盲动”变成“感知运动”
普通机器人靠编码器控制位置,只能“按死命令走”。而关节扭矩传感器实时测量每个关节受到的扭转力,精度可达0.01牛米
发表于 04-17 17:27

昆泰芯高速磁编码器实现机器人关节双端测量
昆泰芯KTM59/KTH71系列磁编码器凭借高精度(24位分辨率)、高速响应与强抗干扰能力,为机器人关节提供双端角度检测,实现从动力输入到动作输出的全链路精准控制。

集成多摩川磁性编码器的伺服电机与机器人关节设计创新
起着决定性作用。今天,我们就来聊聊集成多摩川磁性编码器的伺服电机与机器人关节的设计创新,这可是机器人领域里的一项大突破!
基于MT6816单芯片磁编码的机器人关节模组一体化设计
随着机器人技术的快速发展,关节模组的性能直接决定了机器人的运动精度和响应速度。传统的光电编码器虽然精度较高,但在抗污染、抗振动等方面存在明显短板。本文将详细
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
帮助机器人实时修正重心,大幅降低翻倒风险。
在关节运动控制上,磁传感器芯片实现 “毫米级精度保障”。以昆泰芯 KTM59 系列磁
发表于 08-26 10:02
集成MT6701磁编芯片的机器人关节模块化设计与驱动优化
随着机器人技术的快速发展,关节模块作为机器人的核心执行单元,其性能直接决定了机器人的运动精度和响应速度。近年来,磁

MT6701磁编芯片赋能机器人关节:实现高精度、低延迟位置反馈
随着机器人技术的快速发展,对关节运动控制的精度和实时性要求越来越高。传统的编码器方案在精度、体积和成本等方面逐渐显现出局限性,而基于磁编码技

AMR磁性编码器在人形机器人领域的应用
AMR(各向异性磁阻)磁性编码器在人形机器人领域具有重要的应用价值,主要得益于其高精度、耐用性和环境适应性。以下是其关键应用场景及优势分析:1.关节运动控制精准角度测量AMR

MT6701绝对式磁编码器优化机器人关节伺服控制
在当今科技飞速发展的时代,机器人已经广泛应用于工业制造、物流配送、医疗服务等众多领域。而机器人关节伺服控制作为机器人运动的关键技术,其性能的优劣直接影响着
多维科技携机器人关节高精度磁编码器方案,亮相美国Sensors Converge 2025
科技(MultiDimensionTechnologyCo.,Ltd.,MDT)将携机器人关节高精度磁编码器方案参展(展位号:710)。该方案基于高性能隧道磁阻(TMR)技术,针对工业





评论