 在研华科技的嵌入式IPC上设置实时Linux和EtherCAT主站
在研华科技的嵌入式IPC上设置实时Linux和EtherCAT主站

根据一些客户的反馈,在EtherCAT应用的实时操作系统(RTOS)中,Linux是最受欢迎的选择。对于需要快速处理器性能的高要求应用,x86 CPU架构通常是最好的选择。基于这些原因,工业PC(IPC)——也被称为嵌入式PC,非常适合EtherCAT应用,但是IPC的BIOS必须提供足够的选项来配置系统进而实现实时性能。研华是一家满足这些要求的优秀工控机制造商,因此我们将在此展示如何在研华MIC770-V3工控机上设置实时Linux系统和运行acontis EtherCAT主站软件EC-Master。
Motrotech
盟通技术干货
01
前提条件
在研华科技 IPC上,通过设置和安装Ubuntu 22.04 LTS的实时Linux内核,我们可以顺利使用acontis的EtherCAT主站软件EC-Master,整个过程简单易行。

Motrotech
安装步骤
安装Linux发行版
首先需要为工控机安装系统,任何Linux发行版都可以。
安装实时内核
使用Ubuntu 22.04中可用的预构建实时内核,或者自己构建实时内核。
BIOS设置
在进一步操作之前,需要更改BIOS中的一些设置以实现实时性能。主要是停用超线程、虚拟化支持和省电选项。
优化实时内核
实时性能优化的下一级是配置Linux实时内核。如使用Ubuntu 22.04 LTS中包含的预构建实时内核,可无需为此重建内核。
安装acontis EC-Master
将EC-Master的评估版本解压并安装。
性能测试
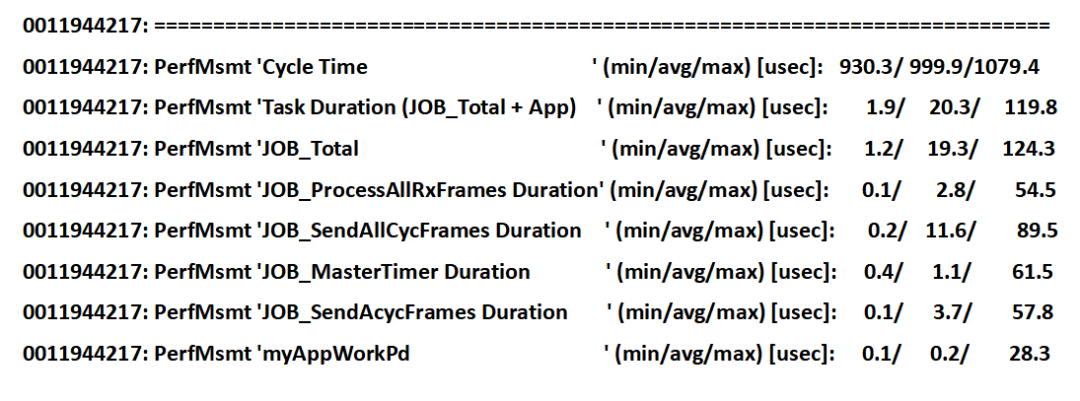
我们将使用内置的性能测量功能来测量 EcMasterDemo 示例应用程序的实际周期时间。开启此性能测量后,EcMasterDemo 应用程序会定期输出周期时间的最小值、平均值和最大值,以及底层作业任务和应用任务的进一步测量结果。
结论
在Ubuntu 22.04 LTS安装实时 Linux 内核并将 Linux 发行版转化为 RTOS 变得前所未有的简单。研华IPC也是轻松安装和设置实时Linux以及acontis EtherCAT主站软件EC-Master的绝佳选择。通过一些简单的内核参数优化,Linux 的实时性能可以以最小的代价得到进一步提高。
如果有相关技术疑问或者文件资料的获取,欢迎各位客户朋友参照下方的联系方式前来询问,盟通工程师一对一为您解答。
北京盟通科技有限公司成立于2013年,是工业自动化领域的高新技术企业。公司专注于实时现场总线技术及工业通讯技术的研发、推广及技术支持服务。依托于核心团队多年的海外和行业经验,盟通科技与欧洲多家自动化领域的佼佼者达成战略合作关系,为客户提供EtherCAT主站协议栈、OPC UA SDK软件开发包、CANopen协议栈、FSoE协议软件、CAN总线硬件、DINA安全模块、艾默生Connext软件等工业协议的标准和定制化产品。
-
嵌入式
+关注
关注
5212文章
20792浏览量
339010 -
Linux
+关注
关注
88文章
11868浏览量
219904 -
IPC
+关注
关注
3文章
384浏览量
55141
发布评论请先 登录
2026年高性能 EtherCAT 主站控制方案选型:EC-Master 核心主站协议栈与实时性架构指南


如何在Zynq UltraScale+ MPSoC平台上通过JTAG启动嵌入式Linux镜像
DR1M90 开源 IgH EtherCAT 主站案例:伺服电机正反转实时控制方案
从小白到大牛:Linux嵌入式系统开发的完整指南
嵌入式实时操作系统的特点
在英伟达Thor平台部署EtherCAT主站:实测高性能、低抖动与低占用
在英伟达Thor平台部署EtherCAT主站:实测高性能、低抖动与低占用
在高性能 AI 平台上部署 EtherCAT 主站:实测低抖动、低占用方案

PCIe-2E主站卡:高实时性,低门槛的EtherCAT开发方案

【米尔NXP i.MX 91开发板评测】移植运行IGH EtherCAT主站
基于米尔安路飞龙派FPGA FPSoC+移植SOEM实现EtherCAT主站控制功能
一文读懂:嵌入式Linux实时性进阶
2025研华嵌入式设计论坛上海站:聚焦Edge Computing &amp; Edge AI,共探技术创新与生态融合




评论