 船舶运动姿态测量应用
船舶运动姿态测量应用

应用背景
船舶在外行驶时遭遇大风浪,确实会面临诸多挑战,如剧烈的摇晃、降速、航向不稳定等,这些都可能引发操作困难甚至危险。现代船舶发展越来越趋向于大型化、专业化,各种新型大型船舶如超大型油船、集装箱船等,随着船舶尺寸的增大,船舶营运条件的复杂化,船舶的安全营运问题尤显突出。为对海上航行船舶的安全状态进行更加准确的监测就需要实时测量获取船舶的运动姿态。
姿态传感器在船舶安全运行中确实发挥着至关重要的作用,特别是在监测船体倾斜角度方面。它安装在船舶甲板的水平平台上,能够精确测量船只在行驶过程中或靠岸时船体本身的倾斜角度。这一功能对于确保船舶的安全航行至关重要,能够实时、精确地测量船只在各种航行状态下的姿态信息。当船舶本体倾斜角度超过安全阈值时,姿态传感器会迅速发出警报信号,提醒船员及时采取紧急措施,如调整航行方向、减速或采取其他必要的防护措施,从而避免翻船等危险情况的发生。
应用概况
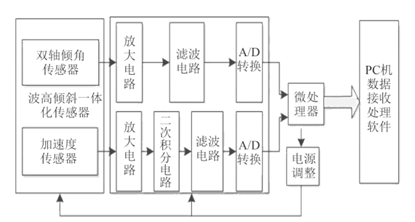
为了获取海上航行船舶及自航模试验中船模的姿态参数,保障船舶航行安全,维特智能JY901S姿态传感器深度应用于船舶运动姿态测量。姿态传感器与波高传感器共同集成使用,波高传感器对船舶升沉信息进行采集,姿态传感器对船舶的纵摇和横摇姿态信息进行采集,采集到的信息经多路 A/D 转换后送入单片机进行处理,实时得出船舶运动的升沉、纵摇及横摇变化。经处理后的三组数据由船舶运动姿态测量系统通过 RS-485 串口送到数据接收处理机存储、分析并实时显示船舶运动的姿态变化曲线。
JY901S姿态传感器具备结构紧凑、小型化、集成化、易装卸,而且具有量程大、分辨率高、实时性强等特点,经过客户实际试验及海上测试,JY901S在系统应用中性能稳定,测量精度高,实用价值良好。
应用架构
利用JY901S姿态传感器可测量载体相对于惯性空间的运动参数。将姿态测量硬件集成到船舶运动姿态测量系统并固定暗转到船体上,当船体的升沉运动、摇滚摆幅状态发生改变时,所对应的垂直加速度、水平倾角也随之变化,传感器检测到水平倾角和垂直加速度的变化,并输出相应的信号量,最后,再对加速度传感器输出的信号量进行2 次积分即可得到船体的升沉、倾斜数据信息。支持设置倾斜角度和沉降阈值,当触发阈值后提供报警警示,如:当船体的角度大于15°时,虽然尚未达到翻船的危险程度,但也可能对船舶的稳定性和航行安全构成威胁,传感器同样会在此情况下发出报警信号,提醒船员注意船舶的倾斜情况,并采取相应的措施来确保航行安全。
姿态传感器应用技术指标
纵摇、横摇测量范围:±20°
纵摇、横摇测量精度:0.2°动态环境
纵摇、横摇测量分辨率:0.05°
电源电压直流:12 V±10%
频响:0.05~1 Hz
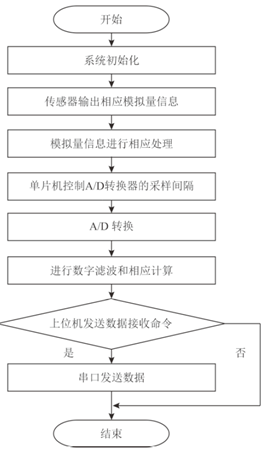
姿态测量系统工作流程
应用安装
船舶运动姿态测量系统安装在钢质圆柱体中。钢质圆柱体的下方有安装孔方便安装固定在船体上,圆柱体上面有提手方便携带,同时配有一根带水密插头的四芯屏蔽电缆,经钢质圆柱体上方引出将得到的数据送入PC 机数据接收处理软件中进行实时显示、存储与分析。

JY901S姿态传感器

JY901S姿态传感器是基于MEMS技术的高性能三维运动姿态测量系统。它包含三轴陀螺仪、三轴加速度计,三轴电子罗盘等运动传感器。通过集成各种高性能传感器和运用自主研发的姿态动力学核心算法引擎,结合高动态卡尔曼滤波融合算法,为客户提供高精度、高动态、实时补偿的三轴姿态角度,通过对各类数据的灵活选择配置,可高度集成,满足船舶运输、桥梁建筑、高铁道路、灾害监测、能源电力等多种行业的的应用场景。
姿态传感器作为船舶安全运行中必不可少的测量工具,其精确测量和及时报警的功能对于确保船舶的航行安全具有重要意义,能够实时测量船舶的倾斜角度,包括俯仰角度和侧滚角度,使船员能够实时掌握船只当前的运行姿态,从而及时调整运行方向,确保船舶的安全稳定行驶。
审核编辑 黄宇
-
传感器
+关注
关注
2578文章
55811浏览量
795255 -
测量
+关注
关注
10文章
5771浏览量
117081
发布评论请先 登录
JY62产品:高性能三维运动姿态测量系统的卓越之选
HWT101产品:高性能三维运动姿态测量系统的卓越之选
高空立面作业的姿态传感核心——高性能MEMS IMU!
高性能MEMS IMU:机器人自主运动的核心感知中枢
电动船舶物联网监控管理系统方案

突破极限,精准感知:双轴MEMS加速度计引领高精度运动测量新时代

湃睿科技亮相 2025 船舶工业数智化创新技术交流大会,共绘船舶高质量发展新蓝图

MEMS加速度计:小身材里藏着怎样的&quot;运动感知&quot;大能量?

想让设备感知运动与姿态?这款MEMS加速度计如何成为智能系统的核心?

ANSA人体模型姿态调整工具介绍

陀螺仪在惯性导航、飞行控制、姿态控制等领域应用
还在为高精度导航发愁?MEMS陀螺仪让你轻松掌控运动姿态!

如何让设备姿态测量更精准?这款超小MEMS陀螺仪来帮你!

这个IMU是如何重新定义精准运动控制的?
船用变压器,可以成为船舶电力的基石吗?




评论