 SLAMWARE ROS SDK的基础架构、部署方法和应用示例介绍
SLAMWARE ROS SDK的基础架构、部署方法和应用示例介绍

ROS作为机器人行业应用最广泛的基础架构之一,是很多用户开发机器人应用的首选框架,如果要在基于ROS开发的系统中集成思岚科技的机器人底盘或者SLAMKit建图定位解决方案,有什么最便捷的方法呢?ROS SDK就是为此而生。本文将为您介绍ROS SDK的基础架构、部署方法和应用示例。
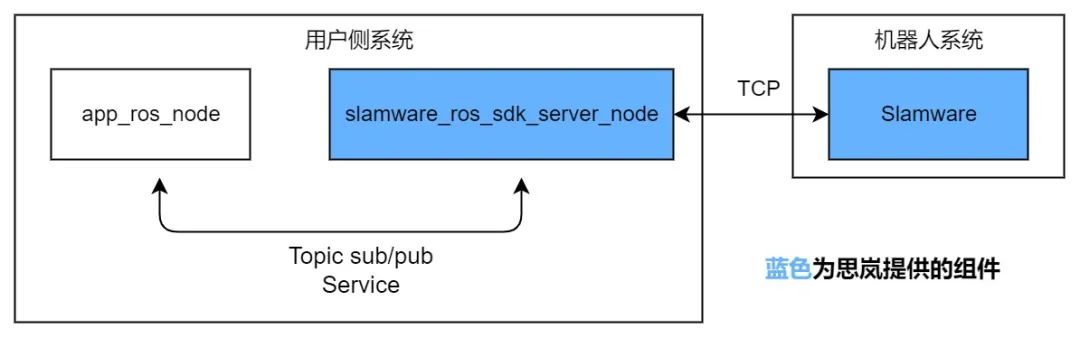
ROS SDK通过内部SDK连接机器人或SLAMKit软件,并作为一个独立的ROS节点运行。ROS SDK可发布标准的激光雷达、定位、地图、传感器数据等消息,同时订阅设置机器人位姿、开始/暂停建图、重定位、移动等控制命令。整体架构如下图所示:
在本次Slamware ROS SDK 入门引导教程中,你将:
掌握如何下载和安装相应版本的ROS SDK包
了解如何部署和开发SLAMWARE ROS SDK
了解相关的topic功能列表
开发环境需求
基于Ubuntu 16.04操作系统,并装有ROS软件包。
硬件需求
为使用ROS SDK,您需要一台基于Slamware的移动机器人,开启并配置合适的IP地址。slamware_ros_sdk_server_node节点启动后将尝试连接该机器人。
下载和安装SDK
由于ROS和Ubuntu系统有较强的耦合性,且不同版本之间会存在兼容性问题,因此我们推荐用户根据下表安装对应的版本。
| Ubuntu系列版本 | ROS版本代号 | 默认GCC版本 |
| 16.04 | Kinetic | GCC5.4 |
| 18.04 | Melodic | GCC7 |
| 20.04 |
Noetic(ROS1) Foxy(ROS2) |
GCC9 |
我们提供的ROS SDK支持ROS1和ROS2,支持aarch64和x86_64双平台,以及不同的GCC版本,如下所示:
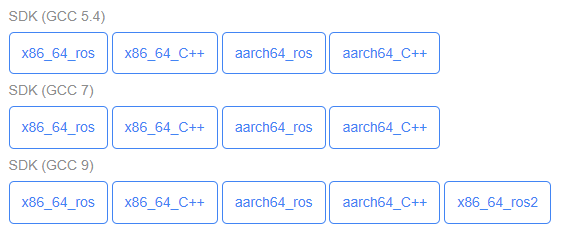
* 相关版本可至思岚官网下载
Slamware ROS SDK包含了您开发过程中可能会用到的资源、代码,其目录结构组织如下:
| 目录 | 说明 |
| docs | 参考文档 |
| scr | 源码 |
| --slamware_ros_sdk | ROS SDK源码包 |
| --slamware_sdk | SDK相关头文件与库文件 |
部署和示例
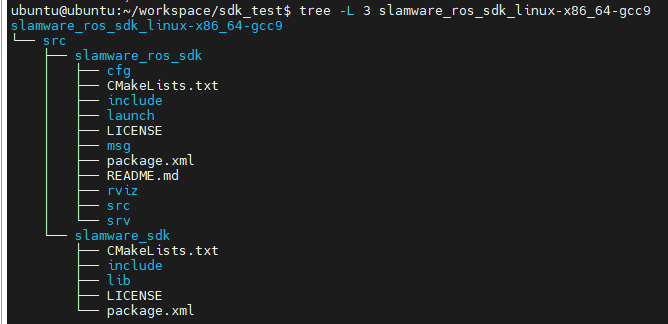
以x86_64平台的Ubuntu20.04系统为例,将下载到的slamware_ros_sdk_linux-x86_64-gcc9.tar.gz解压后的目录结构如下:
1、编译
进入slamware_ros_sdk_linux_x86_64_gcc9目录,并执行cakin_make(ROS2则是colcon build)即可
2、配置工作空间系统环境
source devel/setup.bash
3、启动节点
若移动机器人处于AP模式,连接机器人WIFI,启动节点。
roslaunch slamware_ros_sdk slamware_ros_sdk_server_node.launch ip_address:=192.168.11.1
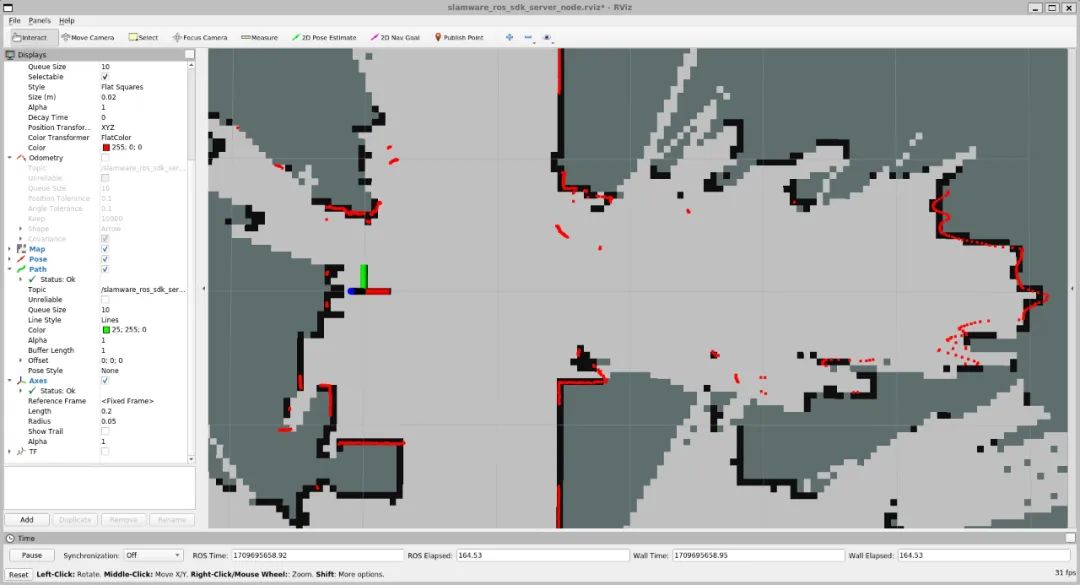
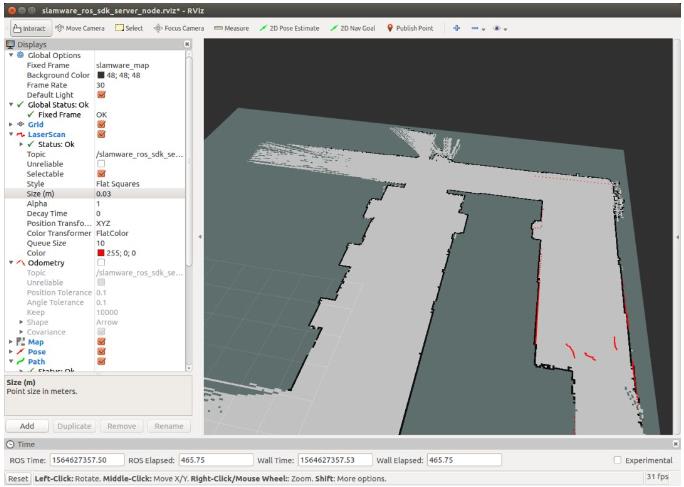
通过rviz查看机器人位姿、地图和激光观测。
roslaunch slamware_ros_sdk view_slamware_ros_sdk_server_node.launch
节点说明
|
点击文末“ slamware_ros_sdk_server_node节点 |
发布地图、机器人位姿与状态信息,接收控制指令 |
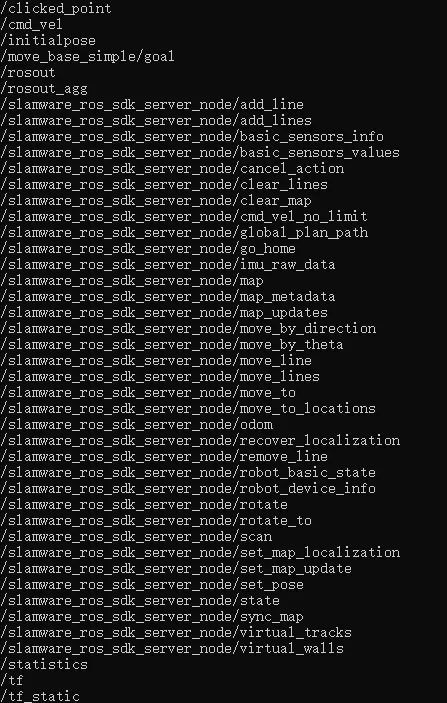
功能列表
相关topic列表如下:
审核编辑:刘清
-
传感器
+关注
关注
2578文章
55833浏览量
795524 -
机器人
+关注
关注
214文章
31650浏览量
224563 -
激光雷达
+关注
关注
983文章
4597浏览量
197411 -
ROS
+关注
关注
1文章
296浏览量
18918 -
Ubuntu系统
+关注
关注
0文章
93浏览量
4692
原文标题:【教程】SLAMWARE ROS SDK 入门引导
文章出处:【微信号:slamtec-sh,微信公众号:思岚科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
在STM32上运行ROS节点——rosserial&stm32开发及调试方法 精选资料推荐
ROS简介
搭建ARM+ROS的硬件载体之ROS的移植及测试方法
ESP8266 RTOS SDK的编程示例手册资料免费下载
如何利用SLAMWARE ROS SDK进行机器人导航定位开发
SCR的调试方法以及示例程序介绍
ros驱动-架构及电机驱动和编码器功能的实现

ROS基本介绍

ROS1的通信架构的基础通信方式及相关概念

ROS/ROS 2 介绍
实现ARM+ROS(机器人操作系统)之运行ROS!

RV1103 开发板+SDK部署

ROS部署PaddlePaddle的CV模型

Unity与ROS链接介绍

在mmWave SDK增加QSPI Flash驱动的示例



评论