 ArmSoM Rockchip系列产品 通用教程 之 Display 使用
ArmSoM Rockchip系列产品 通用教程 之 Display 使用

1. Display简介
RK3588 的VOP (video output process)分为4个Port:
| port | 分辨率 |
|---|---|
| VP0 | 4K |
| VP1 | 4K |
| VP2 | 4K |
| VP3 | 1080P |
RK3588 VP 和各显⽰接口的连接关系:
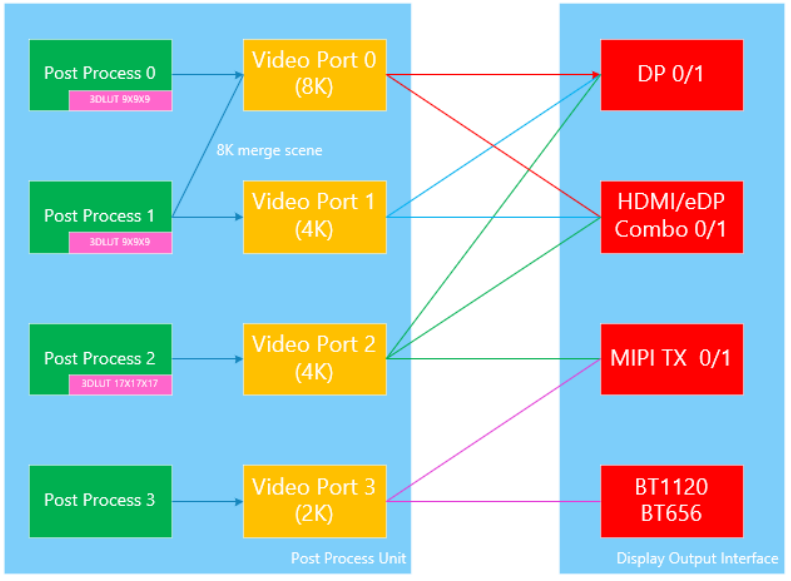
需要注意的是,RK3588 的 HDMI 和 DP ⽀持 8K 输出,但是在 8K 输出模式下,⼀个显⽰接口需要同时占⽤ VP0 和 VP1 。所以如果产 品上需要⽀持 8K 显⽰输出,VP1 上要注意不要连接其他显⽰接口。
1.2 RK3588支持的显示接口
2个DP
2个HDMI/eDP 共用接口
BT656/BT1120
2. ArmSoM-W3显示接口
ArmSoM-W3有着丰富的显示接口。最多支持四路显示输出:两路HDMI,一路MIPI-DSI,外加一路DP接口。可以做到多屏同显/异显。
下面对各个显示输出接口的配置和使用作基本的介绍
3. HDMI
ArmSoM-W3硬件上有两个 HDMI 显示输出接口:2x HDMI OUT2.1
其中一个HDMI OUT 支持 8K@60fps 或者 4K@120fps另一个HDMI OUT 支持 4K@60fps
3.1 HDMI相关的DTS配置
kernelarcharm64bootdtsrockchiprk3588-armsom-w3.dts
//打开 HDMI0 功能&hdmi0 { status = "okay";};//打开 HDMI0 的 硬件 phy&hdptxphy_hdmi0 { status = "okay";};//配置HDMI0到VP0上面&hdmi0_in_vp0 { status = "okay";};//打开 HDMI0 音频输出&hdmi0_sound { status = "okay";};//配置HDMI0上面显示开机logo&route_hdmi0 { status = "okay";};//打开 hdmi1 功能&hdmi1 { status = "okay";};//打开 hdmi1 的 硬件 phy&hdptxphy_hdmi1 { status = "okay";};//配置HDMI1到VP1上面&hdmi1_in_vp1 { status = "okay";};//打开 HDMI1 音频输出&hdmi1_sound { status = "okay";};//配置HDMI1上面显示开机logo&route_hdmi1 { status = "okay";};
4. DP
ArmSoM-W3硬件上有一个 Type-C 接口输出的DP,分辨率可达 8192x4320@30Hz, PHY 链路速率可以达到 8.1Gbps/lane。
4.1 DTS配置
4.1.1 DP 控制器的配置如下:
&dp0 {status = "okay";};&dp0_in_vp2 {status = "okay";};
4.1.2 PHY 配置如下:
&usbdp_phy0 { status = "okay"; orientation-switch; svid = < 0xff01 >; sbu1-dc-gpios = < &gpio4 RK_PA6 GPIO_ACTIVE_HIGH >; sbu2-dc-gpios = < &gpio4 RK_PA7 GPIO_ACTIVE_HIGH >; port { #address-cells = < 1 >; #size-cells = < 0 >; usbdp_phy0_orientation_switch: endpoint@0 { reg = < 0 >; remote-endpoint = < &usbc0_orien_sw >; }; usbdp_phy0_dp_altmode_mux: endpoint@1 { reg = < 1 >; remote-endpoint = < &dp_altmode_mux >; }; };};
4.1.3 Type-C 接口配置PD 芯片
Type-C 接口需要通过 Type-C 的 CC 检测和 PD 协商来配置 lane 和 HPD 的状态, 所以还需要配置 PD 芯 ⽚(当前⽀持的 PD 芯⽚有 fusb302, husb311):
&i2c4 { status = "okay"; pinctrl-names = "default"; pinctrl-0 = < &i2c4m1_xfer >; usbc0: fusb302@22 { compatible = "fcs,fusb302"; reg = < 0x22 >; interrupt-parent = < &gpio3 >; interrupts = < RK_PB4 IRQ_TYPE_LEVEL_LOW >; int-n-gpios = < &gpio3 RK_PB4 GPIO_ACTIVE_LOW >; pinctrl-names = "default"; pinctrl-0 = < &usbc0_int >; //vbus-supply = < &vcc12v_dcin >; vbus-supply = < &vbus5v0_typec >; status = "okay"; ports { #address-cells = < 1 >; #size-cells = < 0 >; port@0 { reg = < 0 >; usbc0_role_sw: endpoint@0 { remote-endpoint = < &dwc3_0_role_switch >; }; }; }; usb_con: connector { compatible = "usb-c-connector"; label = "USB-C"; data-role = "dual"; power-role = "dual"; try-power-role = "sink"; op-sink-microwatt = < 1000000 >; sink-pdos = < PDO_FIXED(5000, 3000, PDO_FIXED_USB_COMM) PDO_FIXED(9000, 3000, PDO_FIXED_USB_COMM) PDO_FIXED(12000, 3000, PDO_FIXED_USB_COMM) >; source-pdos = < PDO_FIXED(5000, 3000, PDO_FIXED_USB_COMM) >; altmodes { #address-cells = < 1 >; #size-cells = < 0 >; altmode@0 { reg = < 0 >; svid = < 0xff01 >; vdo = < 0xffffffff >; }; }; ports { #address-cells = < 1 >; #size-cells = < 0 >; port@0 { reg = < 0 >; usbc0_orien_sw: endpoint { remote-endpoint = < &usbdp_phy0_orientation_switch >; }; }; port@1 { reg = < 1 >; dp_altmode_mux: endpoint { remote-endpoint = < &usbdp_phy0_dp_altmode_mux >; }; }; }; }; };};
4.1.4 配置DP开机 logo
&route_dp0 { status = "okay"; connect = < &vp2_out_dp0 >;};
需要注意的是,这⾥的 connect 属性配置 DP 在 U-Boot 阶段绑定 VOP Port2, 所以 dtsi 中的配置要允许 DP绑定 VOP Port2:
&dp0_in_vp2 { status = "okay";};
提示
⽬前不⽀持 Type-C 接口的 DP 开机 logo!
4.2 调试
4.2.1 查看 connector 状态:
在 /sys/class/drm ⽬录下可以看到驱动注册的各个 card,其中 card0-DP-1 是 DP 显⽰设备
armsom@armsom:~$ ls /sys/class/drm/card0 card0-DP-1 card0-HDMI-A-1 card0-Writeback-1 card1 renderD128 renderD129 version
以 card0-DP-1 为例,其⽬录下有如下内容:
armsom@armsom:~$ ls /sys/class/drm/card0-DP-1/device dpms edid enabled modes power status subsystem uevent
enable 查看使能状态:
armsom@armsom:~$ cat /sys/class/drm/card0-DP-1/enableddisabled
status 查看连接状态:
armsom@armsom:~$ cat /sys/class/drm/card0-DP-1/statusdisconnected
4.2.2 强制使能/禁⽤ DP
#强制禁⽤ DPrk3588_s:/ # echo off > /sys/class/drm/card0-DP-1/status#强制使能 DPrk3588_s:/ # echo on > /sys/class/drm/card0-DP-1/status#恢复热插拔检测rk3588_s:/ # echo detect > /sys/class/drm/card0-DP-1/status
5. MIPI DSI
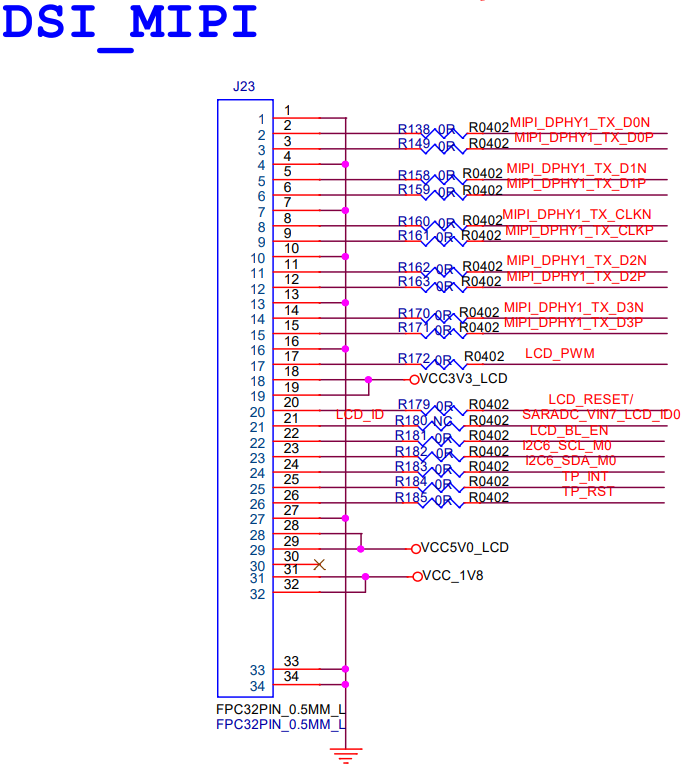
ArmSoM-W3硬件上有一个 MIPI-DSI 显示输出接口,支持 DPHY2.0 和 4 Lane 的数据输出,分辨率可达 4K@60Hz
5.1 原理图
5.3 MIPI DSI相关的DTS配置
5.3.1背光配置
dsi1_backlight: dsi1-backlight { status = "okay"; compatible = "pwm-backlight"; pwms = < &pwm2 0 25000 0 >; brightness-levels = < 0 20 20 21 21 22 22 23 23 24 24 25 25 26 26 27 27 28 28 29 29 30 30 31 31 32 32 33 33 34 34 35 35 36 36 37 37 38 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 >; default-brightness-level = < 200 >; enable-gpios = < &gpio2 RK_PC2 GPIO_ACTIVE_HIGH >; pinctrl-names = "default"; pinctrl-0 = < &dsi1_backlight_en >; };
5.3.2 屏幕上电时序以及参数配置
&dsi1 { status = "okay"; dsi1_panel: panel@0 { status = "okay"; compatible = "simple-panel-dsi"; reg = < 0 >; power-supply = < &vcc_lcd_mipi1 >; //使用gpio模拟regulator reset-gpios = < &gpio2 RK_PC1 GPIO_ACTIVE_LOW >; backlight = < &dsi1_backlight >; pinctrl-names = "default"; pinctrl-0 = < &dsi1_lcd_rst_gpio >; reset-delay-ms = < 10 >; enable-delay-ms = < 10 >; prepare-delay-ms = < 10 >; unprepare-delay-ms = < 10 >; disable-delay-ms = < 10 >; dsi,flags = < (MIPI_DSI_MODE_VIDEO | MIPI_DSI_MODE_VIDEO_BURST | MIPI_DSI_MODE_LPM | MIPI_DSI_MODE_EOT_PACKET) >; dsi,format = < MIPI_DSI_FMT_RGB888 >; dsi,lanes = < 4 >; panel-init-sequence = [ 15 00 02 B0 01 15 00 02 C0 26 15 00 02 C1 10 15 00 02 C2 0E 15 00 02 C3 00 15 00 02 C4 00 15 00 02 C5 23 15 00 02 C6 11 15 00 02 C7 22 15 00 02 C8 20 15 00 02 C9 1E 15 00 02 CA 1C 15 00 02 CB 0C 15 00 02 CC 0A 15 00 02 CD 08 15 00 02 CE 06 15 00 02 CF 18 15 00 02 D0 02 15 00 02 D1 00 15 00 02 D2 00 15 00 02 D3 00 15 00 02 D4 26 15 00 02 D5 0F 15 00 02 D6 0D 15 00 02 D7 00 15 00 02 D8 00 15 00 02 D9 23 15 00 02 DA 11 15 00 02 DB 21 15 00 02 DC 1F 15 00 02 DD 1D 15 00 02 DE 1B 15 00 02 DF 0B 15 00 02 E0 09 15 00 02 E1 07 15 00 02 E2 05 15 00 02 E3 17 15 00 02 E4 01 15 00 02 E5 00 15 00 02 E6 00 15 00 02 E7 00 15 00 02 B0 03 15 00 02 BE 04 15 00 02 B9 40 15 00 02 CC 88 15 00 02 C8 0C 15 00 02 C9 07 15 00 02 CD 01 15 00 02 CA 40 15 00 02 CE 1A 15 00 02 CF 60 15 00 02 D2 08 15 00 02 D3 08 15 00 02 DB 01 15 00 02 D9 06 15 00 02 D4 00 15 00 02 D5 01 15 00 02 D6 04 15 00 02 D7 03 15 00 02 C2 00 15 00 02 C3 0E 15 00 02 C4 00 15 00 02 C5 0E 15 00 02 DD 00 15 00 02 DE 0E 15 00 02 E6 00 15 00 02 E7 0E 15 00 02 C2 00 15 00 02 C3 0E 15 00 02 C4 00 15 00 02 C5 0E 15 00 02 DD 00 15 00 02 DE 0E 15 00 02 E6 00 15 00 02 E7 0E 15 00 02 B0 06 15 00 02 C0 A5 15 00 02 D5 1C 15 00 02 C0 00 15 00 02 B0 00 15 00 02 BD 30 15 00 02 F9 5C 15 00 02 C2 14 15 00 02 C4 14 15 00 02 BF 15 15 00 02 C0 0C 15 00 02 B0 00 15 00 02 B1 79 15 00 02 BA 8F 05 78 01 11 05 78 01 29 ]; panel-exit-sequence = [ 05 32 01 28 05 78 01 10 ]; disp_timings1: display-timings { native-mode = < &dsi1_timing0 >; dsi1_timing0: timing0 { clock-frequency = < 160000000 >; hactive = < 1200 >; vactive = < 1920 >; hfront-porch = < 80 >; hsync-len = < 1 >; hback-porch = < 60 >; vfront-porch = < 35 >; vsync-len = < 1 >; vback-porch = < 25 >; hsync-active = < 0 >; vsync-active = < 0 >; de-active = < 0 >; pixelclk-active = < 1 >; }; }; ports { #address-cells = < 1 >; #size-cells = < 0 >; port@0 { reg = < 0 >; panel_in_dsi1: endpoint { remote-endpoint = < &dsi1_out_panel >; }; }; }; }; ports { #address-cells = < 1 >; #size-cells = < 0 >; port@1 { reg = < 1 >; dsi1_out_panel: endpoint { remote-endpoint = < &panel_in_dsi1 >; }; }; };};
5.3.3 打开对应的dsi节点,开机logo
//打开背光的pwm节点 &pwm2 { status = "okay"; pinctrl-names = "active"; pinctrl-0 = < &pwm2m2_pins >; }; //在dsi1上接了一个mipi屏,这个配置开启dsi1 &dsi1 { status = "okay"; }; &mipi_dcphy1 { status = "okay"; }; //默认dsi配置vp2和vp3上面,这里配置为dsi使用vp3,可以根据屏的分辨率来确认使用vp2还是vp3,vp2支持4K,vp3只支持 2048x1536 &dsi1_in_vp2 { status = "disabled"; }; &dsi1_in_vp3 { status = "okay"; }; //配置dsi1显示开机logo &route_dsi1 { status = "okay"; connect = < &vp3_out_dsi1 >; };
5.4. 调试
通过如下指令即可查询 VOP 的状态:
cat /sys/kernel/debug/dri/0/summary
获取的 VOP 状态如下图:
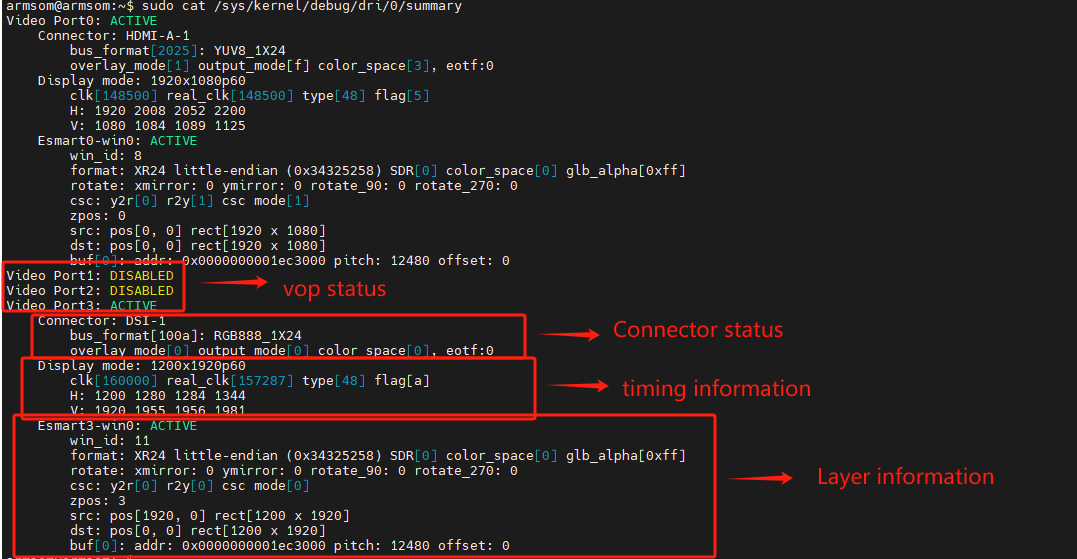
Video Portx: 表⽰当前的 Video Port 的状态
Connector: Video Port 当前连接的输出接口
Display mode: Video Port 当前输出时序
Clusterx-winx(Esmartx-winx): 图层信息
5.5 MIPI-DSI 预览

审核编辑 黄宇
-
Display
+关注
关注
2文章
54浏览量
25596 -
Rockchip
+关注
关注
0文章
98浏览量
19720 -
RK3588
+关注
关注
8文章
610浏览量
7783
发布评论请先 登录
ArmSoM Rockchip系列产品通用教程之Camera使用

Banana Pi 携手 ArmSoM 推出人工智能加速 RK3576 CM5 计算模块
Cortex-M0+通用 MCU CW32F系列产品介绍
【产品介绍】武汉芯源Cortex-M0+通用 MCU CW32F系列产品介绍
RK3588平台产测之ArmSoM-W3 DDR压力测试
RK3588平台产测之ArmSoM产品高温环境测试
armsom:为何选择rk3588开发与Jetson Nano引脚兼容的嵌入式产品
ArmSom--摄像头开发指南(二)

ArmSoM-W3应用开发之安装docker

ArmSoM Rockchip系列产品 通用教程 之 CAN 使用
ArmSoM Rockchip系列产品 通用教程 之 RTC 使用



评论