 ArmSoM Rockchip系列产品 通用教程 之 CAN 使用
ArmSoM Rockchip系列产品 通用教程 之 CAN 使用

CAN 使用
1. CAN 简介
CAN (controller Area Network):控制器局域网络总线,是一种有效支持分布式控制或实时控制的串行通信网络。
- 目前世界上绝大多数汽车制造厂商都采用CAN总线来实现汽车内部控制系统之间的数据通信。
- RK3568/RK3588的CAN驱动文件:drivers/net/can/rockchip/rockchip_canfd.c
- 在ArmSoM-Sige7中,CAN集成在40PIN中,可供用户复用为CAN相关引脚。
2. 原理图
CAN在40PIN中的位置: CAN_TX对应40PIN中的第35编号,CAN_RX对应40PIN中的第12编号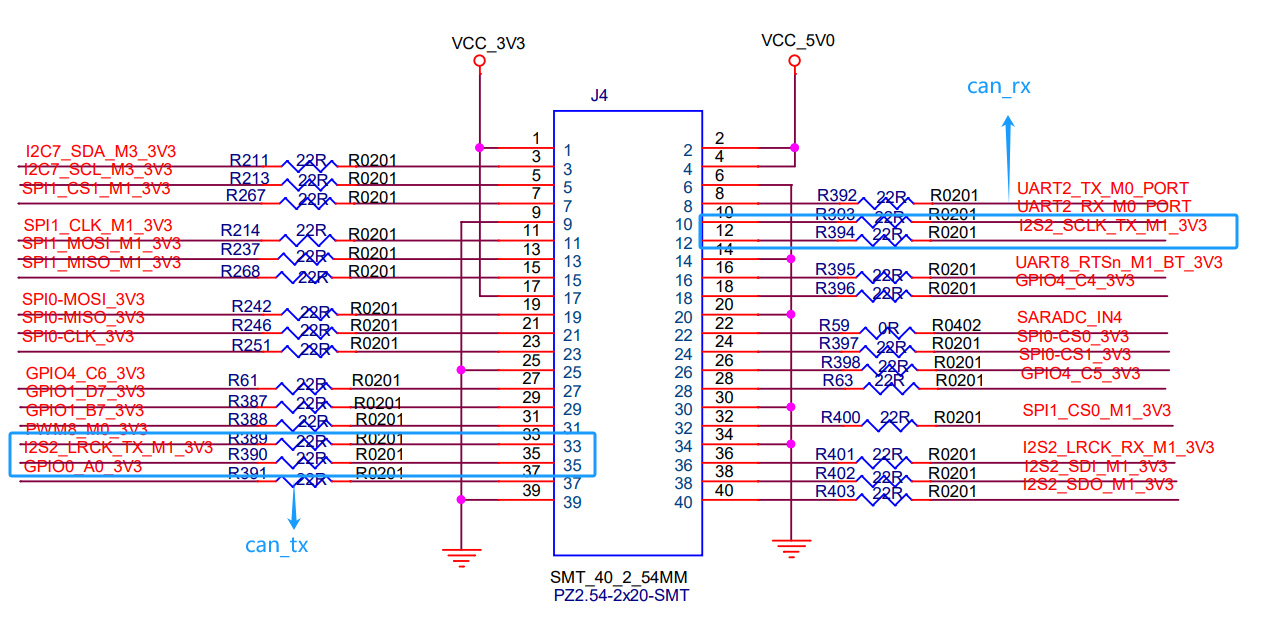
3. 硬件连接
CAN模块之间接线:CAN_TX接CAN_TX,CAN_RX接CAN_RX。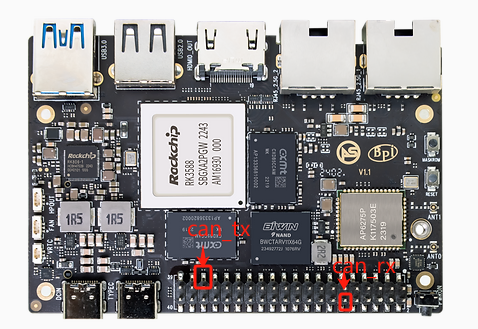
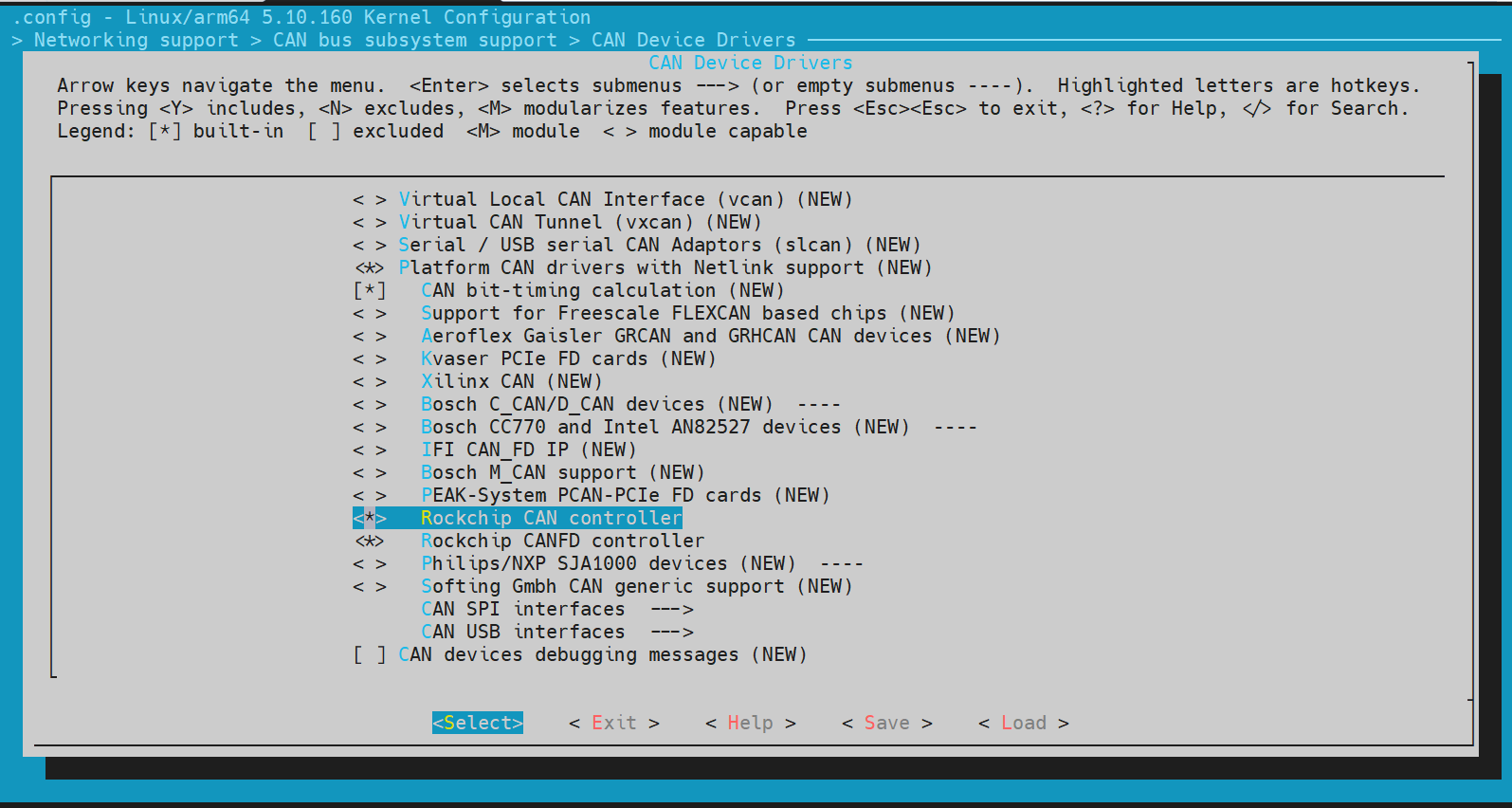
4. 内核配置
- rockchip_linux_defconfig配置:
CONFIG_CAN=y
CONFIG_CAN_DEV=y
CONFIG_CAN_ROCKCHIP=y
CONFIG_CANFD_ROCKCHIP=y
- 内核配置:
cd kernel
make ARCH=arm64 menuconfig
make savedefconfig
- 选择:Networking support ---> CAN bus subsystem support ( )--->CAN Device Drivers( ) ---> Platform CAN drivers with Netlink support(*)

5. DTS 节点配置
5.1 主要参数:
5.2 芯片级公共配置
kernel-5.10/arch/arm64/boot/dts/rockchip/rk3588s.dtsi
can0: can@fea50000 {
compatible = "rockchip,can-2.0";
reg = < 0x0 0xfea50000 0x0 0x1000 >;
interrupts = < GIC_SPI 341 IRQ_TYPE_LEVEL_HIGH >;
clocks = < &cru CLK_CAN0 >, < &cru PCLK_CAN0 >;
clock-names = "baudclk", "apb_pclk";
resets = < &cru SRST_CAN0 >, < &cru SRST_P_CAN0 >;
reset-names = "can", "can-apb";
pinctrl-names = "default";
pinctrl-0 = < &can0m0_pins >;
tx-fifo-depth = < 1 >;
rx-fifo-depth = < 6 >;
status = "disabled";
};
can1: can@fea60000 {
compatible = "rockchip,can-2.0";
reg = < 0x0 0xfea60000 0x0 0x1000 >;
interrupts = < GIC_SPI 342 IRQ_TYPE_LEVEL_HIGH >;
clocks = < &cru CLK_CAN1 >, < &cru PCLK_CAN1 >;
clock-names = "baudclk", "apb_pclk";
resets = < &cru SRST_CAN1 >, < &cru SRST_P_CAN1 >;
reset-names = "can", "can-apb";
pinctrl-names = "default";
pinctrl-0 = < &can1m0_pins >;
tx-fifo-depth = < 1 >;
rx-fifo-depth = < 6 >;
status = "disabled";
};
can2: can@fea70000 {
compatible = "rockchip,can-2.0";
reg = < 0x0 0xfea70000 0x0 0x1000 >;
interrupts = < GIC_SPI 343 IRQ_TYPE_LEVEL_HIGH >;
clocks = < &cru CLK_CAN2 >, < &cru PCLK_CAN2 >;
clock-names = "baudclk", "apb_pclk";
resets = < &cru SRST_CAN2 >, < &cru SRST_P_CAN2 >;
reset-names = "can", "can-apb";
pinctrl-names = "default";
pinctrl-0 = < &can2m0_pins >;
tx-fifo-depth = < 1 >;
rx-fifo-depth = < 6 >;
status = "disabled";
};
- compatible = “rockchip,can-1.0” ,rockchip,can-1.0用来匹配can控制器驱动。
- compatible = “rockchip,can-2.0” ,rockchip,can-2.0用来匹配canfd控制器驱动。
- assigned-clock-rates用来配置can的始终频率,如果CAN的比特率低于等于3M建议修改CAN时钟到100M,信号更稳定。高于3M比特率的,时钟设置200M就可以。
- pinctrl配置:根据实际板卡连接情况配置can_h和can_l的iomux作为can功能使用。
5.3 板级配置
kernel-5.10/arch/arm64/boot/dts/rockchip/rk3588-armsom-w3.dts
/* can1 */
&can1 {
status = "okay";
assigned-clocks = < &cru CLK_CAN1 >;
assigned-clock-rates = < 200000000 >;
pinctrl-names = "default";
pinctrl-0 = < &can1m1_pins >; #根据原理图进行配置
};
- 由于系统根据上述dts节点创建的CAN设备只有一个,而第一个创建的设备为CAN0
6. CAN通信测试
- 查询当前⽹络设备:
ifconfig -a
- CAN启动
ip link set can0 down //关闭CAN
ip link set can0 type can bitrate 500000 #设置⽐特率500KHz
ip -details -statistics link show can0 #打印can0信息
ip link set can0 up //启动CAN
- CAN发送
cansend can0 123#DEADBEEF #发送(标准帧,数据帧,ID:123,date:DEADBEEF)
cansend can0 123#R #发送(标准帧,远程帧,ID:123)
cansend can0 00000123#12345678 #发送(扩展帧,数据帧,ID:00000123,date:DEADBEEF)
cansend can0 00000123#R #发送(扩展帧,远程帧,ID:00000123)
- CAN接收
candump can0 //candump can0
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
CAN
+关注
关注
59文章
3097浏览量
473523 -
Linux
+关注
关注
88文章
11817浏览量
219555 -
总线
+关注
关注
10文章
3060浏览量
91868 -
Rockchip
+关注
关注
0文章
93浏览量
19655
发布评论请先 登录
相关推荐
热点推荐
TDK-Lambda LS200系列电源:通用工业的可靠之选
和可靠的品质,成为通用工业应用的理想选择。 文件下载: LS200-5/L.pdf 产品概述 TDK-Lambda LS200系列是一系列适用于通用
TCAN1043xx-Q1:汽车CAN收发器的卓越之选
至关重要的作用。而TCAN1043xx-Q1系列低功耗故障保护CAN收发器,凭借其出色的性能和丰富的特性,成为了汽车应用中的理想选择。今天,我们就来深入了解一下这款产品。 文件下载
COSEL AC - DC 电源系列产品深度剖析
COSEL AC - DC 电源系列产品深度剖析 在电子设备的设计中,电源模块的选择至关重要,它直接影响着设备的性能、稳定性和可靠性。今天,我们就来深入了解一下 COSEL 公司的 AC - DC
安世中国发布集成输入和输出保护的LDO系列产品
安世半导体(中国)近期推出了全新的40V输入,120mA/150mA/300mA输出电流的LDO系列。该系列产品集成完整的输入和输出保护功能,完美适用通过线束进行离板供电的汽车电子应用场景,如车身域控、BMS、车灯、转向、动力等一系列产

TCAN1051-Q1系列CAN收发器:汽车应用的理想之选
TCAN1051-Q1系列CAN收发器:汽车应用的理想之选 在汽车电子和工业控制领域,CAN(Controller Area Network)总线凭借其高可靠性、实时性和抗干扰能力,成
TCAN1051系列CAN收发器:工业网络通信的可靠之选
TCAN1051系列CAN收发器:工业网络通信的可靠之选 在工业自动化、汽车电子等众多领域,CAN(Controller Area Network)总线凭借其高可靠性、实时性和抗干扰能
TCAN1042-Q1系列CAN收发器:汽车应用的理想之选
TCAN1042-Q1系列CAN收发器:汽车应用的理想之选 在汽车电子领域,CAN(Controller Area Network)总线作为一种重要的通信协议,广泛应用于各种电子系统中
探索TCAN33x系列:高性能CAN收发器的卓越之选
探索TCAN33x系列:高性能CAN收发器的卓越之选 在当今的电子系统中,可靠的数据通信至关重要,尤其是在工业自动化、汽车电子和通信等领域。CAN(Controller Area Ne
TCAN33x 3.3-V CAN 收发器:CAN FD 应用的理想之选
: TCAN337DR.pdf 一、产品概述 TCAN33x 系列设备与 ISO 11898 高速 CAN 物理层标准兼容。其中,TCAN330、TCAN332、TCAN334 和 TCAN337 的数据速率最高可达 1 Mbp
Amphenol Socapex USBFIELD™ 系列产品:满足严苛环境的 USB 连接解决方案
Amphenol Socapex USBFIELD™ 系列产品:满足严苛环境的 USB 连接解决方案 在电子设备的连接领域,面对复杂恶劣的环境,可靠且高性能的 USB 连接方案至关重要
Cortex-M0+通用 MCU CW32F系列产品介绍
Cortex-M0+ 通用 MCU CW32F系列家族型号展示
2021年10月14日,经过多年的市场调研和潜心研发,武汉芯源半导体自主研发的首款基于 Cortex-M0+ 内核微控制器产品
发表于 12-12 06:22
Amphenol GuardXcel™电缆接头系列产品解析
在工业电子领域,电缆接头作为连接电缆与设备的关键部件,其性能直接影响到整个系统的稳定性和可靠性。Amphenol的GuardXcel™电缆接头系列产品,凭借其卓越的性能和广泛的适用性,在众多工业应用中脱颖而出。今天,我们就来深入剖析这个系列的
基美通用贴片电容CAN18C系列与CAN18X系列的对比分析
基美作为全球知名的电子元件制造商,其通用贴片电容产品以高性能、高可靠性和多样化的特点,广泛应用于多个领域。这里,基美代理商南山电子将重点对比分析基美通用贴片电容CAN18C
基美通用贴片电容C0805C和C0805X系列产品特点和应用场景介绍
基美是一家在电子元件制造领域享有盛誉的企业,其生产的通用贴片电容因卓越的性能和广泛的应用范围而备受青睐。今天,基美授权代理商南山电子就介绍一下基美通用贴片电容C0805C和C0805X系列产品特点
如何使用Banana Pi BPI-M7 瑞芯微RK3588开发板的CAN功能
4.2.1 CAN 引脚
以ArmSoM-Sige7为实例,CAN在40PIN中的位置:
Sige7 40PIN定义
I2C
引脚
功能
CAN1_TX_M1
3
发表于 05-30 17:49



评论