 PID算法终于弄明白了,没有公式那么吓人
PID算法终于弄明白了,没有公式那么吓人

看起来PID高大尚,先被别人唬住,后被公式唬住,由于大多数人高数一点都不会或者遗忘,所以再一看公式,简直吓死。
直接从网上找了PID相关公式截图如下。
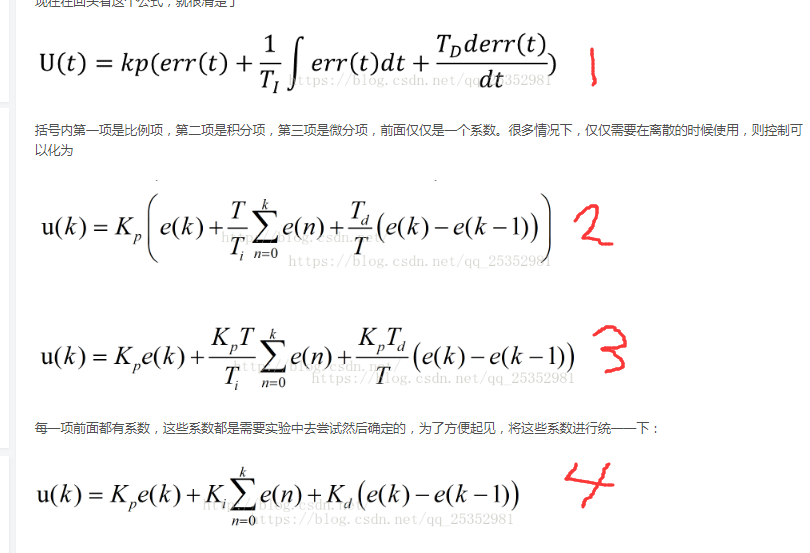
了解了很浅的原理后,结果公式看不懂,不懂含义,所以最终没有透彻。我这里先对公式进行剖析,公式理解明白了,结合网上的一些PID讲述的例子,就明白了。
先对PID这三个系数的含义进行简单扫盲。同时也防止自己遗忘。P是比例系数,I是积分系数、D是微分系数。
下面对PID这三个系数进行详细说明:演示PID三个参数的控制作用。
比例系数P
比例系数P是干什么用,其实如果现在你是初中生的话,你一下子就懂了,比例系数就是用在穿过(0,0)这个坐标点直线的放大倍数k,k越大,直线的斜率越大,所以是用在y = k * x中的,其中的k就是比例系数p,大家都简称为kp,所以就变成了y = Kp * x。
x就是当前值currentValue和目标值totalValue的差值,简称误差err,则err = currentValue - totalValue。y就是执行器对应的输出值U,所以执行器对应的输出值U = Kp * ( currentValue - totalValue ) 。
所以,如果说是使用比例进行调节。
则当前第1次调节时执行器对应的输出值为:
U1 = Kp * ( curentValue1 - totalValue1 )
第2次调节时执行器对应的输出值为:
U2 = Kp * ( currentValue2 - totalValue2 )
这就是比例系数P的应用,也就是大家说的比例调节。比例调节就是根据当前的值与目标值的差值,乘以了一个Kp的系数,来得到一个输出值,这输出值直接影响了下次当前值的变化。如果只有比例调节的话,系统会震荡的比较厉害。比如你的汽车现在运行的速度是60km/h,现在你想通过你的执行器去控制这个汽车达到恒定的50km/h,如果你只用kp进行比例调节话。U = Kp * ( 60 - 50 ),假设Kp取值为1,此时得到U执行器的输出值是10,结果当你执行器输出后,发现汽车一下变成了35Km/h,此时U2 = Kp * (35 - 50),此时得到U执行器的输出值是-15,结果当你执行器输出后,发现汽车变成了55Km/h,由于惯性和不可预知的误差因素,你的汽车始终无法达到恒定的50km/h。始终在晃动,相信如果你在车上,你一定吐的很厉害。所以光有比例系数进行调节,在有些场合是没有办法将系统调稳定的。所以可以为了减缓震荡的厉害,则会结合使用比例P和微分D。
微分系数D
微分,实际上是对误差进行微分。加入误差1是err(1)。误差2是err(2)。则误差err的微分是 (err2 - err1)。乘上微分系数D,大家叫做KD,则当执行器第1次调节后有了第1次的误差,第2次调节后有了第2次的误差,则结合P系数。就有了PD结合,根据每次调节时,误差的值的经验推算,你就能选取出D的系数。假如误差是越来越小的,那么微分后肯定是一个负值。负值在乘以了一个D系数 加上了比例调节的值后肯定值要比单纯使用比例调节的值要小,所以就启到了阻尼的作用。有了阻尼的作用就会使得系统区域稳定。
PD结合的公式经过上面的分析后为:
U(t) = Kp * err(t) + Kd * derr(t)/dt
积分系数I
积分,实际上是对误差的积分,也就是误差的无限和。如何理解积分系数I,这里引用网上的例子
以热水为例。假如有个人把我们的加热装置带到了非常冷的地方,开始烧水了。需要烧到50℃。
在P的作用下,水温慢慢升高。直到升高到45℃时,他发现了一个不好的事情:天气太冷,水散热的速度,和P控制的加热的速度相等了。
这可怎么办?
P兄这样想:我和目标已经很近了,只需要轻轻加热就可以了。
D兄这样想:加热和散热相等,温度没有波动,我好像不用调整什么。
于是,水温永远地停留在45℃,永远到不了50℃。
根据常识,我们知道,应该进一步增加加热的功率。可是增加多少该如何计算呢?
前辈科学家们想到的方法是真的巧妙。
设置一个积分量。只要偏差存在,就不断地对偏差进行积分(累加),并反应在调节力度上。
这样一来,即使45℃和50℃相差不太大,但是随着时间的推移,只要没达到目标温度,这个积分量就不断增加。系统就会慢慢意识到:还没有到达目标温度,该增加功率啦!
到了目标温度后,假设温度没有波动,积分值就不会再变动。这时,加热功率仍然等于散热功率。但是,温度是稳稳的50℃。
kI的值越大,积分时乘的系数就越大,积分效果越明显。
所以,I的作用就是,减小静态情况下的误差,让受控物理量尽可能接近目标值。
I在使用时还有个问题:需要设定积分限制。防止在刚开始加热时,就把积分量积得太大,难以控制。最后推荐下相关文章:PID到底是个啥?讲个故事告诉你。
-
算法
+关注
关注
23文章
4800浏览量
98515 -
PID
+关注
关注
38文章
1505浏览量
91874 -
执行器
+关注
关注
5文章
435浏览量
20573
原文标题:PID算法终于弄明白了,没有公式那么吓人
文章出处:【微信号:c-stm32,微信公众号:STM32嵌入式开发】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录




评论