 凌华科技SuperCAT运动控制器在异型插件机上的应用
凌华科技SuperCAT运动控制器在异型插件机上的应用

应用背景:
插件机的作用是把编带上的电子元器件按照程序自动安装在印刷电路板上的设备,市面上常见的插件机有标准插件机和异型插件机等,其中异型插件机与标准插件机的区别是:异型插件机除了可以插装标准化包装(连续式包裝,元器件间距固定不变)的元器件以外,还能够插装非标准包装或者盘料等多种类元器件。
目前异型插件机的产能相比标准插件机低,但是精度会更高,可插接的元器件类型也更丰富,包含DIP、射频连接器、电容器、电阻器、接线端子、电磁线圈、变电器等基本上全部的元器件。为了不断提升设备的产能并保证运行的精度,越来越多的厂商对运动控制和视觉飞拍提出了更高的要求。
SuperCAT产品概述
SuperCAT是凌华科技打造的基于软件控制的EtherCAT运动控制器,其核心的控制软件来自于凌华二十多年运动控制经验的积累,整合了凌华脉冲卡和EtherCAT总线卡的所有功能,系统通讯周期相比硬件的EtherCAT总线卡得到了大幅提升,同时可以满足更多轴数的应用需求。
SuperCAT产品特性
• 具备EtherCAT主站功能
• 运动控制周期高达125us
• 最多支持128轴运动控制
• 最低 API 延迟<10us
• APS SDK 支援
• MotionCreatorPro2 支援
• 支持开发语法 C#, .NET, C/C++, Python, Java…etc
• 支援多任务与实时程序运行
插件机的需求:
1) 两轴或多轴插补功能。
2) 2D触发功能。
SuperCAT解决方案:
该设备的核心运动控制单元采用SuperCAT主控软件,搭配凌华工业电脑,将原有的脉冲卡或EtherCAT总线卡进行取代,除了可以降低了设备的购置成本以及后期维护的费用外,还可以极大提升总线通讯的速率,从而帮助设备在运动控制中实现更好的速度规划。
1) 两轴插补功能,用到的函数和语法如下,
APS_pt_motion_add_point
Syntax:
C/C++:
I32 APS_pt_motion_add_point ( I32 Axis_ID, I32 ArraySize, F64 *PositionArray, F64 *TimeArray );
Visual Basic:
APS_pt_motion_add_point(ByVal Axis_ID As Long, ByVal ArraySizeAs Long, PositionArrayAs Double, TimeArrayAs Double) As Long
APS_pt_motion_get_status
Syntax:
C/C++:
I32 APS_pt_motion_get_status( I32 Axis_ID, I32 *FreeSize, I32 *PointCount, I32 *State );
Visual Basic: APS_pt_motion_get_status (ByVal Axis_ID As Long, FreeSize As Long, PointCountAs Long, StateAs Long) As Long
APS_pt_motion_start
Syntax:
C/C++:
I32 APS_pt_motion_start (I32 Dimension, I32 *Axis_ID_Array, I32 Enable );
Visual Basic:
APS_pt_motion_start(ByVal Dimension As Long, Axis_ID_Array As Long, ByVal Enable As Long) As Long
APS_pt_motion_reset
Syntax:
C/C++:
I32 APS_pt_motion_reset (I32 Axis_ID);
Visual Basic:
APS_pt_motion_reset (ByVal Axis_ID As Long) As Long
2) 多轴插补功能,用到的函数和语法如下,
APS_line
Syntax:
C/C++:
I32 APS_line( I32 Dimension, I32 *Axis_ID_Array, I32 Option, F64 *PositionArray, F64 *TransPara, ASYNCALL *Wait);
Visual Basic:
APS_line (ByVal Dimension As Long, Axis_ID_Array As Long, ByVal Option As Long, PositionArray As Double, TransPara As Double, Wait As ASYNCALL) As Long
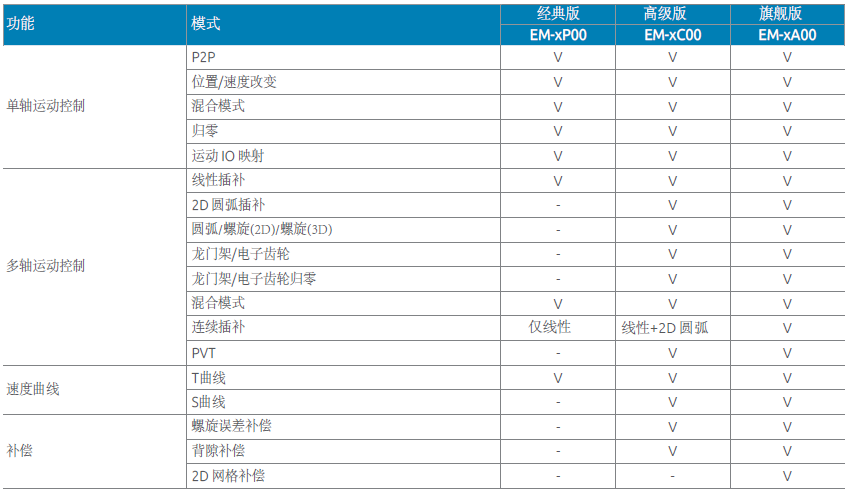
3)凌华科技SuperCAT运动控制器可以提供的功能如下,
4)2D触发功能
2D触发功能通过外接ECAT-TRG4 4通道高速位置比较和触发模块实现,ECAT-TRG4 是 EtherCAT从端模块,具有高速位置比较触发和编码器单个信号中继功能,该模块的规格如下,
• 4 通道点表触发 - 最大10 MHz带FIFO 255 点
• 4 通道线性触发 - 最大10MHz
• 4 通道位置锁存 - 最大3 MHz带 255 点
• 硬件紧急停止接口
• 通过主站最多支持 32 组龙门功能
• 轴参数的断电记忆
• 支持编码器信号中继功能
• 支持高级点表
需要用到的函数和语法如下,
APS_set_field_bus_multi_trigger_table
Syntax:
C/C++:
I32 APS_set_field_bus_multi_trigger_table( I32 Board_ID, I32 BUS_No, I32 MOD_No, I32 MTCmpCh, I32 Dimension, MCMP_POINT *DataArray, I32 ArraySize , I32 Window );
APS_get_field_bus_multi_trigger_table_cmp
Syntax:
C/C++:
I32 APS_get_field_bus_multi_trigger_table_cmp( I32 Board_ID, I32 BUS_No, I32 MOD_No, I32 MTCmpCh, I32 Dimension, MCMP_POINT *CmpVal );
APS_get_field_bus_multi_table_cmp_remain_count
Syntax:
C/C++:
I32 APS_get_field_bus_multi_table_cmp_remain_count( I32 Board_ID, I32 BUS_No, I32 MOD_No, I32 MTCmpCh, I32 *Cnt );
凌华科技EtherCAT一站式解决方案:
凌华科技为智能制造用户提供一站式解决方案,实现生产设备之间的互联互通,全面共享和交互内部数据,从而优化生产流程,更好地应对市场需求的变化。
用户可通过PC端的编程环境,在单个硬件平台上实现应用程序的集中控制,从而降低成本,提高系统可靠性和安全性。
审核编辑:刘清
-
运动控制器
+关注
关注
2文章
493浏览量
26149 -
凌华科技
+关注
关注
0文章
153浏览量
30917
原文标题:凌华科技SuperCAT运动控制器在异型插件机上的应用
文章出处:【微信号:凌华科技,微信公众号:凌华科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录










评论