 PID调试经验分享
PID调试经验分享
很多玩开源飞控的人,安装驱动,端口,刷固件,校准传感器都不是啥问题,而且关于这些以及安装,甚至遥控器设置,网上都有人教。唯独一个PID调试基本是让人最头疼的地方。调法也众说风云说法不一,接下来把修改自MWC飞控国外社区网友的经验分享出来。
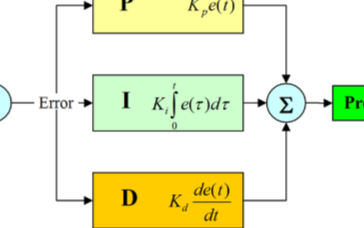
P-I-D:比例-积分-微分
当多轴飞行器在PITCH/ROLL/YAW轴上有任意角度变化时,陀螺仪会输出相对于初始位置的偏差角度值。飞控根据记录的原始位置,使用“PID”程序算法驱动电机,让多轴飞行器回到初始位置。这是个基于测量角度偏差量,随着时间推移的数据抽样与预测未来位置的数据组合。它提供的信息足以使飞控驱动电机,让多轴飞行器回到平衡状态。
P值是PID中最重要的部分,它直接决定飞行器的飞行效果。
首次起飞前PID的基本调整
请先把PID设置成当前程序版本的初始值。
用手小心抓着飞行器,增大油门直到接近悬停的位置,试着把它向前后左右倾斜,你会感觉到飞行器会产生一个反作用力,压制人为造成的倾斜。
改变P值(ROLL/PITCH)的大小,直到飞行器变得难以随意倾斜。如果没有打开自稳功能,飞控会允许你在一段时间内倾斜飞行器,这是正常情况。
现在尝试前后左右摇动飞行器,增大P值(ROLL/PITCH)直到它自己开始出现抖动,再往回减小一点。
重复操作把YAW的P也调整好。
现在已经适合在飞行中调整了。
高级调整,了解P、I和D的实际作用:
P – 纠正飞行器回到初始位置的力度大小。这个修正力度是一个比例值,反映初始位置偏差值减去飞控输入控制方向变化的组合。较高的P值会产生较强的修正力去抵抗飞行器位置的偏移。如果P值太高,在飞行器返回初始位置的过程中会过冲然后再次往反方向修正,接着再次进行回到初始位置的补偿。这会导致飞行器出现持续振荡,严重的话会完全破坏平衡。增大P值:飞行器会逐渐变得稳定,但P值太高会造成振荡和失控。需要注意的是,提高P值会产生一个更强的修正力度,阻止飞行器的偏移。减小P值:飞行器会逐渐开始偏移,但P值太低会让飞行器变得非常不稳定。它会让阻止飞行器偏移的修正力度变弱。特技飞行:需要的P值稍高。普通飞行:需要的P值稍低。
I – 对角度变化进行采样与取平均值计算的时间周期存在偏差时,返回到初始位置有个修正的过程,在修正过程中力度会越来越大,直到达到最大值。较高的I值会增强稳定的效果。增大I值:减小漂移和提升稳定效果,但过大的I值会延长稳定过程的周期,同时也会降低P的效果。减小I值:增强反应速度,但会增加漂移和降低稳定效果,同时会提升P的效果。特技飞行:需要的I值稍低。普通飞行:需要的I值稍高。
D – 飞行器回到初始位置的速度较高的D值(数值与效果相反,较高的D值参数上会更接近0)意味着飞行器会快速返到回初始位置。增大D值:(请记住,增大效果等于减小设定的参数值)提升修正的速度,也会提升产生修正过量与振荡的几率,同时也会提升P的效果。减小D值:(请记住,减小效果等于增大设定的参数值)降低由偏差状态返回初始位置的振荡,恢复到稳定效果的时间变长,同时也会降低P的效果。特技飞行:增大D值(请注意是减小参数值)。普通飞行:减小的D值(请注意是增大参数值)。
一些建议
特技飞行:增大P值直到出现振荡,然后稍微减小一点。改变I值直到悬停漂移达到无法接受的程度,然后稍微增大一点。增大D值(请注意是减小参数值)直到出现大动作控制时无法接受的振荡。P值现在可以稍微减小一点。
稳定飞行(常规/FPV): 增大P值直到出现振荡,然后稍微减小一点。改变I值直到偏差程度达到无法接受的程度,然后稍微增大一点。减小D值(请注意是增大参数值)直到出现大动作控制时回中速度变慢,然后稍微增大一点D值(请注意是减小参数值)。
P值现在可以稍微减小一点。在一般的飞行中,你会找到一组折中的PID值,这是最优化的效果。
P(比例):这是一个增益因子,当多轴飞行器受风等的影响发生向一边倾斜时,P值直接决定多轴飞行器的抵抗这种倾斜的力的大小。P越大,多轴飞行器抵抗意外倾斜的能力越强,但P过于大时会引起多轴飞行器抖动甚至猛烈侧翻。P越小,多轴飞行器抵抗意外倾斜的能力越弱,但P过小时会引起多轴飞行器自平衡能力不足甚至朝一边侧翻(如顺着风的方向)。
I(积分):这个参数决定了飞行控制器对过往飞行状态的依赖程度。如果I值太小,会使飞行器过度依赖当前的误差,不能抑制“过敏”现象,从而造成飞行颠簸;如果I值太大,则会过度削弱系统对误差的反应能力,造成反应迟缓。
D(微分):一旦多轴飞行器发生倾斜,则认为多轴飞行器会继续向同一方向倾斜,合适的D参数的能有效抑制未来可能发生的倾斜。如果D值太小,您会觉得多轴飞行器反应不够灵敏;如果D值太大,也会引起“过敏”。相较于P而言,D反映得更多的是灵敏度,而P反映的是纠正误差的力度。
在此郑重声明一下:大部分的飞机因为不可能存在条件完全一样的情况,所以很多时候PID直接搬运的效果和别人花时间调好的往往效果是不太一样的,在用的设备完全一样,重心点也一样,重量一样等大多数变量都符合的情况下使用同组PID才较有可能直接能稳。所以,仅供参考,还是建议大家花点时间学习调参。
审核编辑:汤梓红
-
PID
+关注
关注
35文章
1446浏览量
83819 -
开源
+关注
关注
3文章
2989浏览量
41720 -
飞行器
+关注
关注
13文章
695浏览量
45045
原文标题:PID调参,几乎是开源飞控玩家最头疼的问题
文章出处:【微信号:雨飞工作室,微信公众号:雨飞工作室】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐






 工商网监
工商网监
评论