 如何运用精益思想开发机器人控制系统?
如何运用精益思想开发机器人控制系统?

随着科技的飞速发展,机器人已经逐渐渗透到我们的生活和工作中。而精益思想作为一种追求卓越、持续改进的管理理念,也被广泛应用于机器人控制系统的开发中。那么,如何运用精益思想开发机器人控制系统呢?天行健分享步骤如下:
1、明确需求
在开发机器人控制系统之前,首先要明确系统的需求。这包括了解客户的需求、市场的需求以及技术的可行性。只有明确了需求,才能为后续的开发工作提供明确的方向。
2、制定计划
根据需求,制定详细的开发计划。这包括确定开发周期、分配资源、制定技术方案等。在制定计划的过程中,要充分考虑各种因素,确保计划的合理性和可行性。
3、开发阶段
在开发阶段,要遵循精益思想的原则,不断优化和改进系统。这包括优化算法、减少冗余代码、提高系统稳定性等。同时,要注重团队协作,确保开发工作的顺利进行。
4、测试阶段
在测试阶段,要对系统进行全面的测试,确保系统的稳定性和性能。同时,要根据测试结果对系统进行优化和改进,提高系统的可靠性和用户体验。
5、部署阶段
在部署阶段,要将系统部署到实际环境中,进行实际应用。在部署过程中,要注重安全性和稳定性,确保系统的正常运行。同时,要根据实际应用情况对系统进行持续改进和优化。
综上所述,运用精益思想开发机器人控制系统可以提高效率、降低成本、提高竞争力并实现持续改进。因此,我们应该在机器人控制系统的开发过程中积极运用精益思想,为未来的机器人技术发展贡献力量。
审核编辑 黄宇
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制系统
+关注
关注
41文章
6999浏览量
114567 -
机器人
+关注
关注
214文章
31633浏览量
224476
发布评论请先 登录
相关推荐
热点推荐
基于米尔RK3576核心板的国产割草机器人解决方案
。
国产算法兼容 :支持与国内SLAM方案商(如科沃斯、追觅等生态伙伴)的算法快速适配,缩短产品落地周期。
3. 执行层:实时控制与丰富接口
割草机器人的底盘运动控制需要极低且确定性的延迟。RK3576
发表于 04-24 17:31
人形机器人连接器标准制定背后:步步精科技的技术实力解析
在人工智能与机器人产业加速发展的背景下,人形机器人正逐步从概念走向产业化落地。作为机器人核心零部件之一,连接器在信号传输、电源管理及系统稳定性方面发挥着关键作用。近日,国内连接器行业再

Neway电机方案在机器人技术方面的优势
,确保电机控制系统在长时间运行中不易出现故障。五、高效能与低损耗,提升系统能效背景:工业机器人关节需高精度、高响应速度的电机控制,电源模块需提供稳定直流电压并减少能量损耗。Neway方
发表于 03-30 09:39

探索RISC-V在机器人领域的潜力
运行ROS 2,充分证明了RISC-V架构完全有能力承载机器人操作系统这样的复杂软件栈。它不仅是学习RISC-V的绝佳工具,更是探索未来边缘计算和智能机器人的一个强大起点。
致谢: 感谢进迭时空、发烧友提供
发表于 12-03 14:40
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
的机器人控制系统,例如米尔的 MYD-LT536 开发板。
二、MYD-LT536:为机器人控制系统而生的核心平台
米尔 MYD-LT53
发表于 11-14 15:48
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
。· 利用开发板上的MIPI CSI1和CSI2接口,完整接入8路摄像头,实现了所有通道的视频预览与采集,为机器人构建了全方位的视觉感知系统。卓越性能表现:· CPU占用率:34%· DDR占用率:50
发表于 10-29 16:41
小萝卜机器人的故事
经过我的申请,
马老师发放了,
小萝卜机器人的,
开发权限,
原来的小萝卜公司,
因为经营不善倒闭,
作为科研产品,
几个技术对此惋惜,
自掏腰包,
要让小萝卜机器人,
再生,
每次听到小萝卜说
发表于 10-23 05:24
自制巡线解迷宫机器人(上)
为原理验证机且为了提高项目整体的开发速度,机器人的所有元器件均采用TB上的现有模块,并使用洞洞板直接焊接的方式来构建其机械结构和电气连接。
在软件层面上,该机器人内部集成有经典的PID闭环控制
发表于 10-20 10:39
ADI安全产品如何简化不同机器人控制系统中安全机制的实现
我们将探讨各种机器人安全用例,展示ADI的安全产品如何简化不同机器人控制系统中安全机制的实现。

ADI解读机器人控制系统中的安全风险和有效安全措施 为机器人技术的未来发展筑牢安全防线
本文探讨了机器人控制系统中的安全风险和有效安全措施。文中介绍了工业安全标准,并分析了满足工业安全标准所需达到的基本要求。

工业机器人的特点
0.3%的年化生产力提升。因此,发展工业机器人推动国内自动化水平,提高产出是目前的不二之选。
** 适用范围广**
机器人相对于工人的优势还体现在应用范围广。机器人可以运用在危险、恶劣
发表于 07-26 11:22
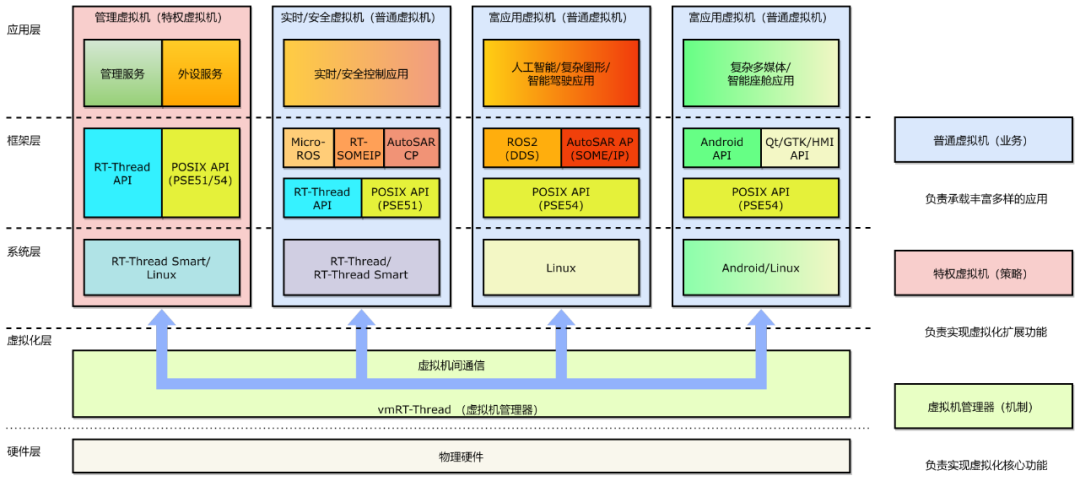
通过vmRT-Thread和ROS2赋能机器人智能开发
随着机器人技术的快速迭代升级,协作机器人、复合移动机器人和人形机器人等新兴应用场景对实时控制与智能决策的深度融合提出了迫切需求。然而,当前
明远智睿SSD2351开发板:语音机器人领域的变革力量
通过网络连接云端服务器进行快速检索和分析,然后利用语音合成技术将答案以自然流畅的语音反馈给用户。同时,借助开发板的网络连接功能,语音机器人还可以与后台管理系统进行数据交互,实时更新知识库和优化服务策略
发表于 05-28 11:36



评论