 Art-Pi+TMC2209步进电机细分控制测试
Art-Pi+TMC2209步进电机细分控制测试

1.背景
前几天找出个步进电机,用L298N驱动测试了一下,具体见上篇文章简单的步进电机驱动调试。但是L298N无法实现细分控制,在低速转动时,声音比较大,且振动厉害,因此想着尝试一下细分控制效果。于是花十二块大洋某宝购买了一块T“MC2209步进电机超静音驱动模块”来测试一下。
2.硬件及连接
2.1硬件
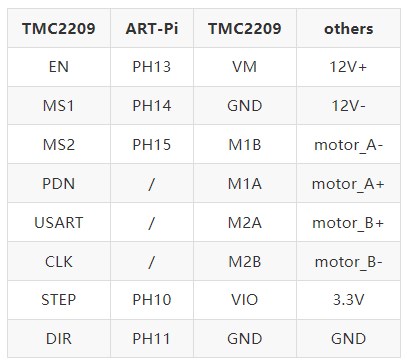
2.2接口连接
TMC2009模块的接口连接如下:
3.原理介绍
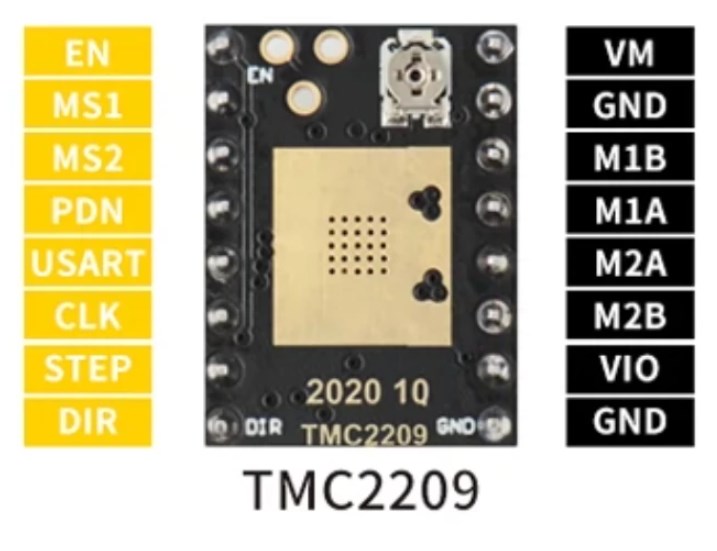
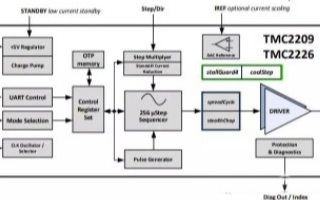
3.1 TMC2209模块介绍
TMC2209是TRIAMINIC推出的一款步进电机驱动模块。驱动模块静音且高精度,可以实现高达1/256步细分控制,实现更平滑静音的步进电机控制。模块内嵌12.5 MHz的内部振荡器,简单串行数据传输的UART。性价比较高的步进电机驱动模块。
3.2 TMC2209规格
工作电压:5.5 – 38V
最大内部时钟频率:12.5 MHz
每相最大电流:2 A
峰值输出电流:2.8A
逻辑工作电压:3/5V
3.3 TMC2209针脚定义
3.4 微步细分配置
1)硬件细分配置
TMC2209模块提供了硬件微步配置,通过MS1和MS2可以实现1/8、1/16、1/32、1/64的细分控制,具体如下:

2)软件细分配置
如果想实现更高的细分控制,则需要通过USART口进行配置,具体如下:
(测试中,测试完完善进来)
4.程序代码
4.1 TMC2209初始化
//硬件微步设置
void micro_step_set(rt_uint8_t step)
{
switch (step) {
case 8:
rt_pin_write(MS1_PIN, PIN_LOW);
rt_pin_write(MS2_PIN, PIN_LOW);
break;
case 16:
rt_pin_write(MS1_PIN, PIN_HIGH);
rt_pin_write(MS2_PIN, PIN_HIGH);
break;
case 32:
rt_pin_write(MS1_PIN, PIN_HIGH);
rt_pin_write(MS2_PIN, PIN_LOW);
break;
case 64:
rt_pin_write(MS1_PIN, PIN_LOW);
rt_pin_write(MS2_PIN, PIN_HIGH);
break;
default:
break;
}
}
static int tmc2209_init(void)
{
rt_pin_mode(EN_PIN, PIN_MODE_OUTPUT);
rt_pin_mode(MS1_PIN, PIN_MODE_OUTPUT);
rt_pin_mode(MS2_PIN, PIN_MODE_OUTPUT);
rt_pin_mode(STEP_PIN, PIN_MODE_OUTPUT);
rt_pin_mode(DIR_PIN, PIN_MODE_OUTPUT);
rt_pin_write(EN_PIN, PIN_LOW);
micro_step_set(MICRO_STEP);
hwtimer_init();
return 0;
}
INIT_APP_EXPORT(tmc2209_init);
4.2 PWM设置
这里采用了PWM(ART-Pi默认的PWM5通道1)来输出脉冲信号控制步进电机的转动速度,下面是使用函数:
int pwm_set(rt_uint16_t fre, rt_uint8_t duty_cycle)
{
rt_uint32_t period = 0;
rt_uint32_t pulse = 0;
pwm_dev = (struct rt_device_pwm )rt_device_find(PWM_DEV_NAME);
if (pwm_dev == RT_NULL)
{
rt_kprintf("pwm sample run failed! can't find %s device!n", PWM_DEV_NAME);
return RT_ERROR;
}
period = 1000000000 / fre;
pulse = period * duty_cycle / 100;
/ 设置PWM周期和脉冲宽度默认值 /
rt_pwm_set(pwm_dev, PWM_DEV_CHANNEL, period, pulse);
/ 使能设备 */
rt_pwm_enable(pwm_dev, PWM_DEV_CHANNEL);
return 0;
}
4.3 定时器配置
这里采用硬件定时器(ART-Pi默认TIM13,PS:settings虽然可以直接配置,但是cubemx默认没配置TIM13,所以直接使用还是不行,需要cubemx配置后才能使用)来控制PWM输出指定的脉冲数量,通过计算步进电机转动的角度所需要的脉冲个数,以及转动速度计算的脉冲时间,计算出定时器的计时时间,超时后停止PWM输出,并禁止TMC2209(不禁止的话电机会发热)。
#define HWTIMER_DEV_NAME "timer13" /* 定时器名称 /
/ 定时器超时回调函数 /
static rt_err_t timeout_cb(rt_device_t dev, rt_size_t size)
{
rt_pwm_disable(pwm_dev, PWM_DEV_CHANNEL);//停止PWM输出
rt_pin_write(EN_PIN, PIN_HIGH);//禁止TMC2209
return 0;
}
int hwtimer_init(void)
{
rt_err_t ret = RT_EOK;
rt_hwtimer_mode_t mode; / 定时器模式 /
rt_uint32_t freq = 1000000; / 计数频率 /
/ 查找定时器设备 /
hw_dev = rt_device_find(HWTIMER_DEV_NAME);
if (hw_dev == RT_NULL)
{
rt_kprintf("hwtimer sample run failed! can't find %s device!n", HWTIMER_DEV_NAME);
return RT_ERROR;
}
/ 以读写方式打开设备 /
ret = rt_device_open(hw_dev, RT_DEVICE_OFLAG_RDWR);
if (ret != RT_EOK)
{
rt_kprintf("open %s device failed!n", HWTIMER_DEV_NAME);
return ret;
}
/ 设置超时回调函数 /
rt_device_set_rx_indicate(hw_dev, timeout_cb);
/ 设置计数频率(若未设置该项,默认为1Mhz 或 支持的最小计数频率) /
rt_device_control(hw_dev, HWTIMER_CTRL_FREQ_SET, &freq);
/ 设置模式为周期性定时器(若未设置,默认是HWTIMER_MODE_ONESHOT)*/
mode = HWTIMER_MODE_ONESHOT;
ret = rt_device_control(hw_dev, HWTIMER_CTRL_MODE_SET, &mode);
if (ret != RT_EOK)
{
rt_kprintf("set mode failed! ret is :%dn", ret);
return ret;
}
return ret;
}
int hwtimer_start(rt_hwtimerval_t timeout)
{
if (rt_device_write(hw_dev, 0, &timeout, sizeof(timeout)) != sizeof(timeout))
{
rt_kprintf("set timeout value failedn");
return RT_ERROR;
}
return RT_EOK;
}
4.4 步进电机控制
这里采用了两种方式来输出脉冲及数量,一种是通过延时和翻转DIR管脚电平实现,一种是通过定时器和PWM来实现。
/*
dir:电机转动方向,0 正转;1 反转
speed:电机转动速度:0-300r/min,注意不同的电机最高转速不一样
angle:电机转动角度:°
/
void turn_control(rt_uint8_t dir, rt_uint16_t speed, float_t angle)
{
rt_uint32_t pulse_num = 0;//脉冲数量
rt_uint16_t delay_time = 0;
rt_uint16_t pulse_fre = 0;//脉冲频率
rt_hwtimerval_t timeout_value;
float_t temp = 0.0;
temp = (angle / (360.0 / 200.0 / MICRO_STEP));
float_t t = 1000000 / ((360.0 / (360.0 / 200.0 / MICRO_STEP)) / 60.0 * speed);
pulse_num = temp;
delay_time = t / 2;
pulse_fre = 1000000 / t;
timeout_value.sec = 0;
timeout_value.usec = t * pulse_num;
//rt_kprintf("%dn", pulse_num);
//rt_kprintf("%dn", delay_time);
//rt_kprintf("%dn", pulse_fre);
//rt_kprintf("%dn", timeout_value.usec);
rt_pin_write(EN_PIN, PIN_LOW);
//设置电机转动方向
if(dir == 0)
rt_pin_write(DIR_PIN, PIN_HIGH);
if(dir == 1)
rt_pin_write(DIR_PIN, PIN_LOW);
pwm_set(pulse_fre, 50);//设置PWM频率并输出
hwtimer_start(timeout_value);//设置定时时间并启动定时器
/ for (int i = 0; i < pulse_num; ++i) {
rt_pin_write(STEP_PIN, PIN_LOW);
//rt_thread_mdelay(speed);
rt_hw_us_delay(delay_time);
rt_pin_write(STEP_PIN, PIN_HIGH);
//rt_thread_mdelay(speed);
rt_hw_us_delay(delay_time);
}
rt_pin_write(EN_PIN, PIN_HIGH);*/
}
4.5 MSH控制台
这里把电机控制加入MSH指令,可以通过控制台来手动实现电机任意控制测试:
static void step_motor_turn(int argc, char**argv)
{
if (argc < 3)
{
rt_kprintf("Please input'step_motor_turn direction speed angle'n");
return;
}
if (!rt_strcmp(argv[1], "forward"))
{
turn_control(0, atof(argv[2]), atof(argv[3]));
}
else if (!rt_strcmp(argv[1], "reverse"))
{
turn_control(1, atoi(argv[2]), atof(argv[3]));
}
else
{
rt_kprintf("Please input'step_motor_turn direction speed angle'n");
}
}
MSH_CMD_EXPORT(step_motor_turn, step_motor_turn );
5.总结
电机的转动确实非常安静,完全听不到声音,在低速控制时转动也比较平滑,完全感受不到振动。性价比不错,有需要做步进电机控制的小伙伴可以参考使用。
-
振荡器
+关注
关注
28文章
4200浏览量
143294 -
步进电机
+关注
关注
153文章
3278浏览量
152951 -
L298N驱动
+关注
关注
0文章
2浏览量
893 -
TMC2209
+关注
关注
1文章
8浏览量
6389 -
ART-Pi
+关注
关注
0文章
23浏览量
1933
发布评论请先 登录
请大神们帮我看看ESP32-C3FH4+TMC2209控制4个42步进电机原理图存在的问题哇。谢谢
ADI Trinamic新品重磅来袭| TMC2240高性能电机驱动芯片=TMC2209和TMC2130完全升级版
在RT-Thread系统中使用TMC5160步进电机驱动
使用STM32控制TMC5160步进电机控制驱动芯片的代码和电路图及工程文件
四层板TMC2208/TMC2209步进电机驱动

TRINAMIC超静音的TMC2209步进驱动器介绍
关于TMC2209步进电机驱动模块–SilentStepStick的知识概况
关于TMC2208与TMC2209的区别及基于STM32F103控制TMC2209模块驱动2相4线步进电机
基于UART通讯控制TMC2208/2209模块驱动两相四线步进电机




评论