 机器人柔顺控制系统原理详解
机器人柔顺控制系统原理详解

写在前面
理解知识原理 VS 实际用好知识原理,是不同的两码事。原理知识,只是一个因素,不是全部;在用之中,知识只是一个参与者,是一个支撑因素,它既不是目标,也不是全部方法,还不一定是思路的关键。这里涉及到认识论问题:还原论 VS 系统论。分解还原之后,需要用到使用的理论原理知识;但脱离它的局部范围,而进入到整体的系统范围,这是系统论发挥作用的地方。还原的那些单点原理知识需要,但远远不够。而且只理解理论原理,不会穿透它来灵活精巧用之,也等于废知识、死知识。
From 穆博士
对于柔顺控制来说,其核心在于实现整个系统的柔顺交互/接触动力学行为,而不仅局限于阻抗/导纳控制原理和算法。实际上,交互动力学行为受到接触力感知动态、力/位置控制内环动态、环境阻抗不确定性、接触前的速度/加速度,采样延迟效应和关节摩擦力等各种因素影响。从影响交互动力学行为的主导因素这一视角分析,并对硬件实现、工作点(接近速度、加速度等)、算法设计及实现进行系统考虑和统筹,才能实现期望的柔顺控制性能。本文在前文的基础上,进一步对交互动力学行为进行介绍。
从接触不稳定谈起 以导纳控制为例(如图1),导纳控制根据感知到的外力F和导纳控制器对参考位置x_0进行修正,参考位置减去位置修正量delta_x,生成实际位置指令x_r,再送入位置控制环路,从而实现柔顺交互。
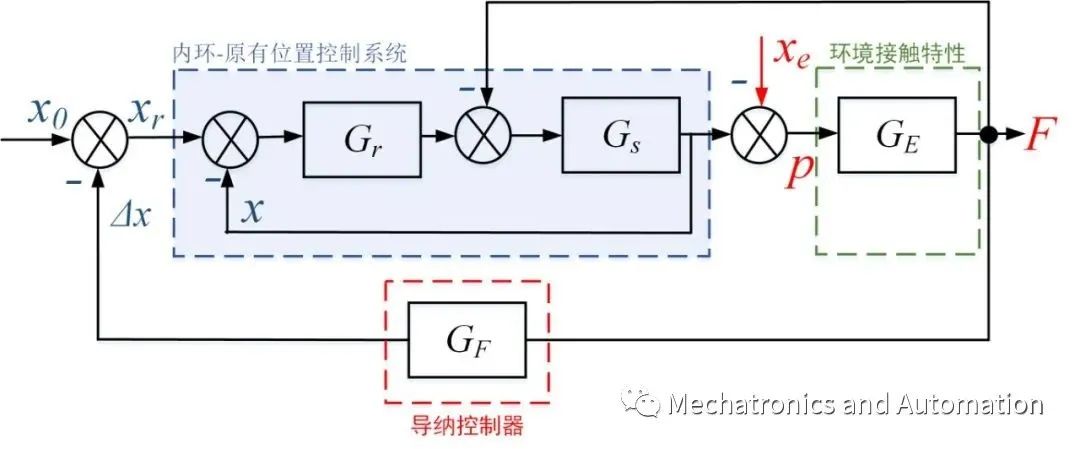
图1. 导纳控制原理
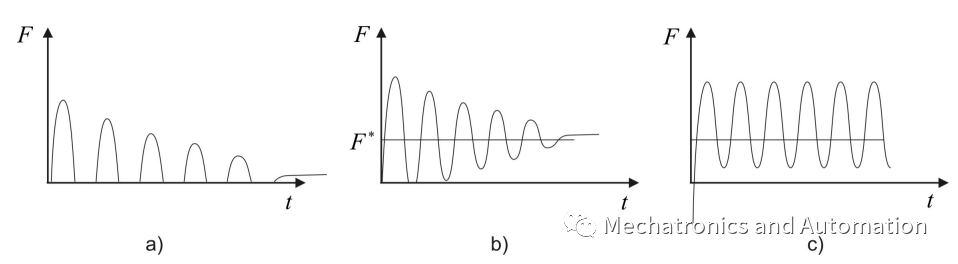
图2. 典型的接触不稳定现象
对于导纳控制,如果环境刚度过大,则在机器人与环境接触时(first impact),将会受到较大的交互力,在位置修正量的作用下,机器人末端将会回退(向脱离接触的方向)。如果阻抗参数设计不合理,位置修正过大,机械臂将会与环境脱离接触,脱离接触后,机械臂回到位置控制模式(此时位置修正量为零),在位置控制模式的作用下,机械臂会再向接触面运动并进行接触,产生交互力,循环往复(bump and then contact lost),相当长的时间内机器人都无法与环境建立接触,甚至会产生过大的冲击力导致机械臂或者接触环境的损害。接触瞬态不稳定现象(contact transition unstability)是机器人柔顺控制系统中首先要避免的问题。
接触瞬态稳定性(contact transient stability)和接触耦合稳定性( coupled stability)是机器人柔顺控制中极为重要的概念,前者保证是否能够建立接触(一旦建立接触后能一直保持);后者则定义了建立接触后,接触是否能够稳定(如交互力是否收敛到稳态值);其中,接触瞬态稳定性是比接触耦合稳定性更为严苛的要求,尤其对于高刚度环境来说(对于刚度相对较小的环境,机器人末端容易透入环境,此时耦合稳定性变为主要矛盾)。根据以上两种接触稳定性概念,可以将接触不稳定现象划分为以下三类(分别如图2a, b, c):
接触瞬态不稳定,即在首次冲击后接触丢失,然后撞击和脱离接触周期性切换;
接触瞬态不稳定但达到了接触耦合稳定条件,即在首次接触丢失后,在后续过程中,能够实现一个相对稳定接触平衡力(取决于初始接触条件和运动参数,如速度、加速度、参考轨迹,这种情况下也有可能始终无法建立接触,即如情况a);
接触瞬态稳定但接触耦合处于临界稳定状态,此时接触力出现周期性振荡;
事实上,在柔顺控制系统调试中,由于系统设计不合理或者阻抗参数设计不合理,经常会出现接触不稳定的现象。如桂凯博士在一个实际测试视频中所展示的,当环境接触刚度减小时,柔顺控制就可以从接触不稳定转变为接触稳定。
实际的交互动态
和一般的控制系统分析和控制算法设计类似,柔顺控制中的接触/交互稳定性是一个十分重要的概念,但由于涉及到复杂的理论分析,往往会被人们忽视。当赋予这些理论分析以物理意义时,人们才会开始注意并欣赏稳定性分析的价值。在引入数学工具前,我们需要对实际的接触/交互动态行为从物理直觉上进行描述。不失一般性地,下文分析仍以工业机械臂+导纳控制组成的柔顺控制系统为例,结合图3~5进行说明实际的交互动态。为简化分析,这里限定交互只发生在一个方向,且为单边接触(unilateral contact),其中图3给出了交互过程中涉及的物理量,图4则给出了典型交互过程中(机器人预期轨迹x_0上升-保持两次,最终脱离接触回到原位),各个物理量的变化情况,图5则对接触建立阶段各个物理量变化做了具体说明。
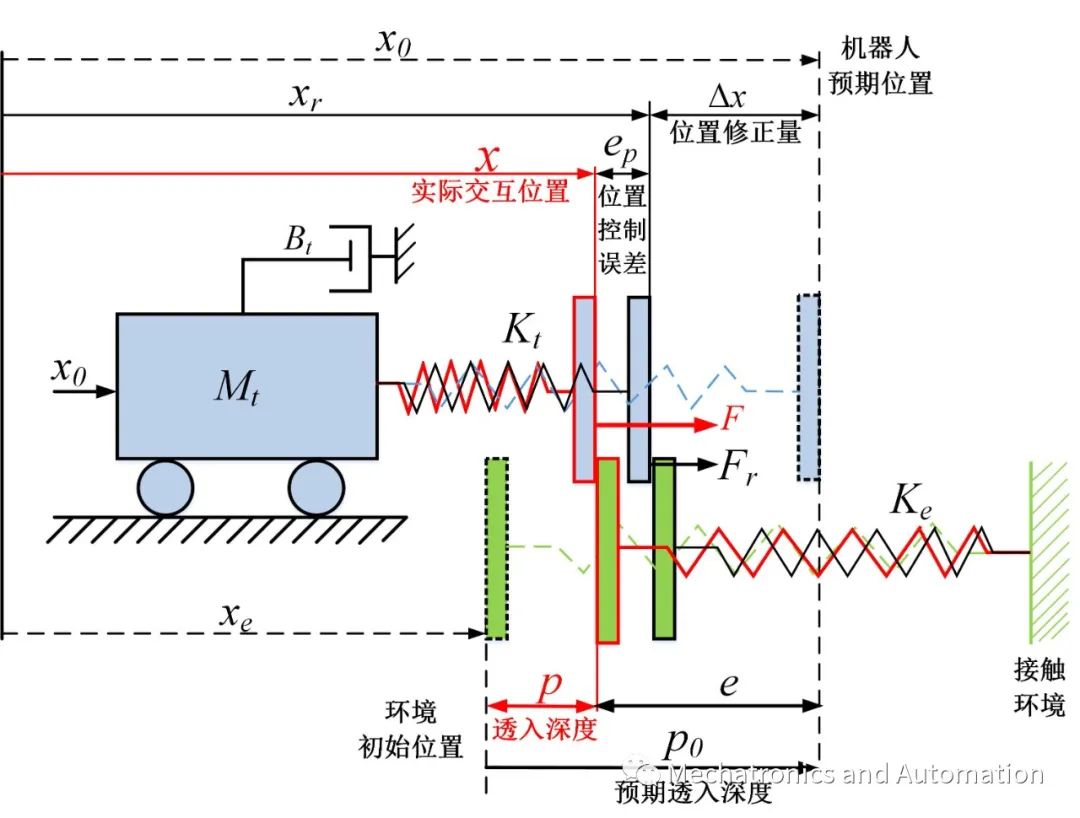
图3. 导纳控制系统等效系统(单自由度)及相关物理量说明
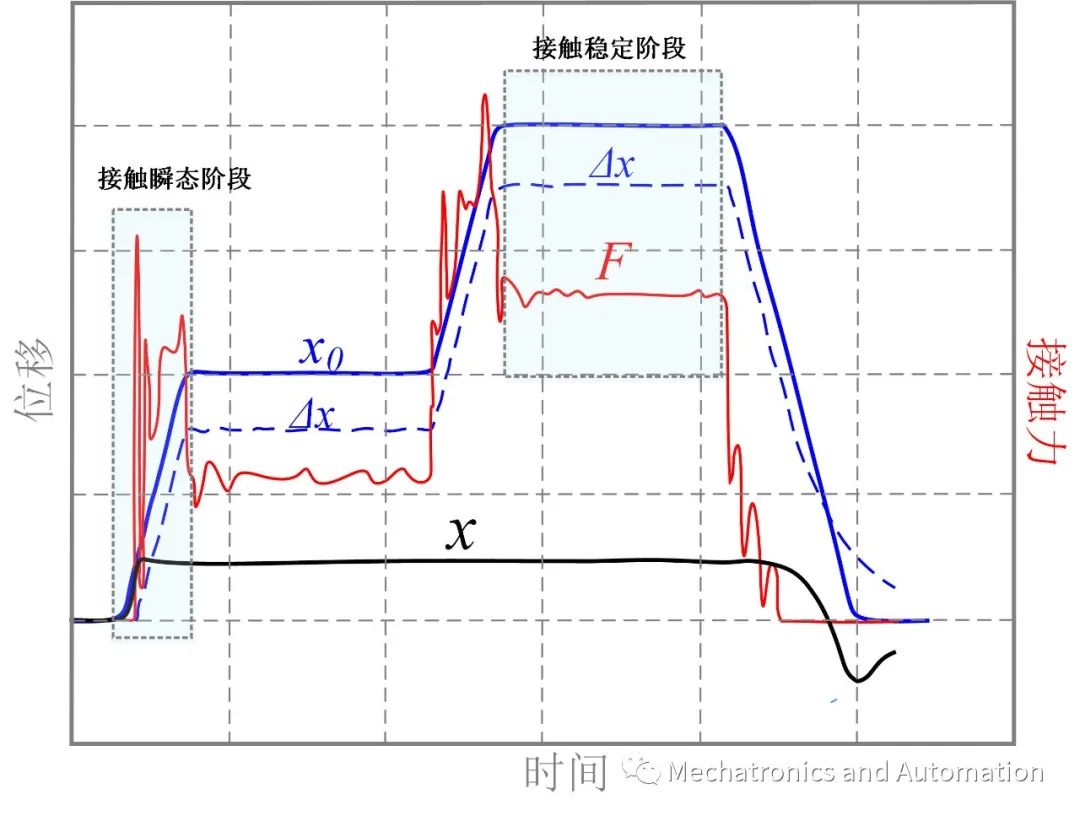
图4. 整个交互过程
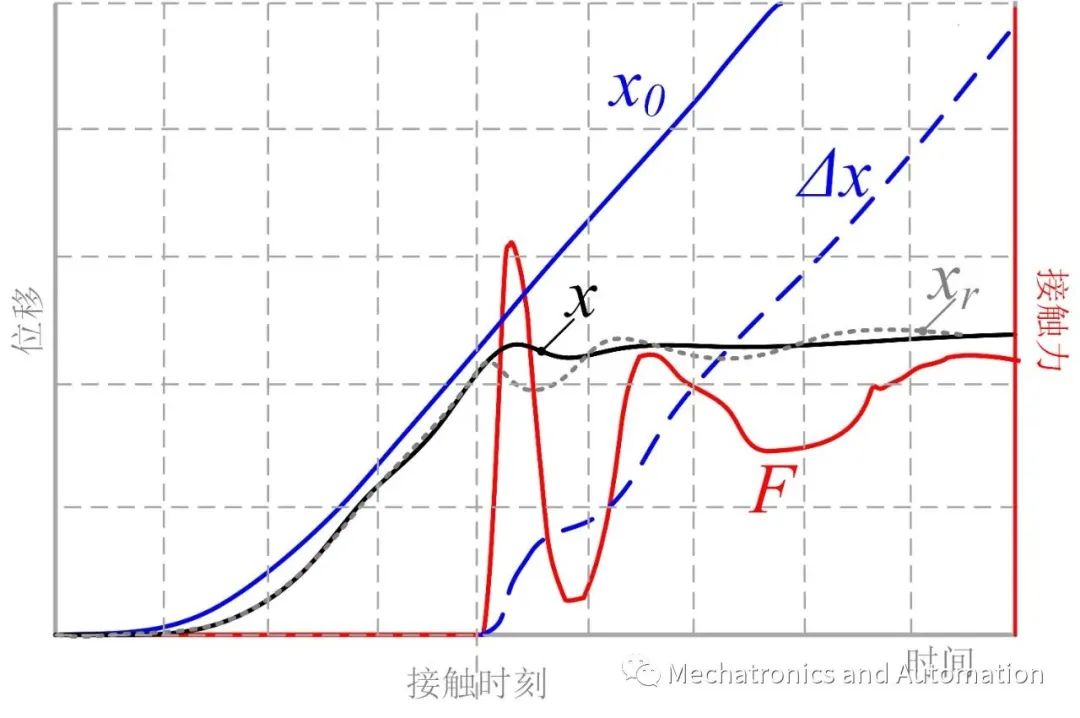
图5、接触建立阶段
在机械臂末端与环境交互过程中,通常可以分为两个阶段-接触建立阶段(或者接触瞬态阶段)和接触稳态阶段。其中在接触建立阶段,各个动态过程如下(参考图5):
机器人以一定(速度, 加速度)沿轨迹x_0向环境进行移动,由于尚未与环境接触,此时交互力F为0;
机器人继续移动,在环境初始位置x_e处发生接触(此时透入深度为p=x-x_e),在环境刚度K_e作用下,交互力F=K_e*p随之产生,并经过力/力矩传感器(接触力感知动态、采样延迟)送入到柔顺控制系统;
参考图1,感知到的交互力F在导纳控制器G_F的作用下(本质为二阶滤波器,存在一定时延),产生位移修正量delta_x,相应的参考位移x_r随之产生并变化;
位置控制系统接受更新的参考位移x_r,机器人实际位置x随之发生变化(受位置控制环带宽、位置控制回路非理想因素影响);
机器人的实际位置x进一步影响着交互位移/透入深度p,透入深度p经环境接触刚度K_e进一步改变交互力F;
值得注意的是,在接触建立阶段,如果系统设计不合理,有可能出现如图2(a)所示的接触瞬态不稳定现象。
当机器人期望轨迹x_0到达设定值后,交互力F和位移修正量delta_x的稳态值随之确定。然而受限于接触力感知动态、环境阻抗以及实际实现的阻抗(Realized Impedance,受位置控制系统动态和期望阻抗动态综合影响),将会出现交互力F在稳态值附近波动的状态,甚至出现如图2c所示的临界稳定状况。
总结
受限于各个动态因素之间的耦合,柔顺控制系统可能会出现非预期的交互动力学行为,即使对于导纳控制系统这一相对容易实现的柔顺控制方案来说。结合实际物理概念,从系统动力学的角度分析各个因素对动力学行为的影响,然后有针对性地引入数学工具进行理论分析和设计,这一思路对于柔顺控制系统设计和实现来说,仍然是十分重要的。下文将引入接触稳定性的概念,并给出相关的稳定性判据,为避免交互不稳定现象提供理论依据。
以上。
审核编辑:汤梓红
-
控制器
+关注
关注
114文章
17924浏览量
195901 -
控制系统
+关注
关注
41文章
7001浏览量
114591 -
机器人
+关注
关注
214文章
31672浏览量
224594 -
位置控制
+关注
关注
0文章
25浏览量
9685 -
柔顺控制
+关注
关注
0文章
4浏览量
947
原文标题:【雷赛智能 | 头条】控制算法手记-机器人柔顺控制
文章出处:【微信号:伺服与运动控制,微信公众号:伺服与运动控制】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录




评论