 基于RT-Thread的RoboMaster电控框架(五)
基于RT-Thread的RoboMaster电控框架(五)

背景
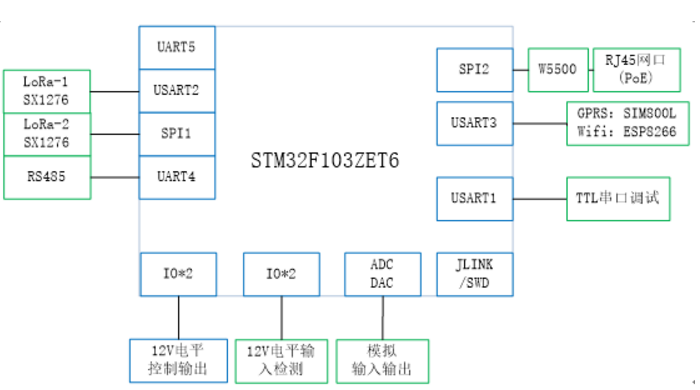
使用的开发板为大疆的 RoboMaster-C 型开发板,基础工程为 rt-thread>bsp>stm32f407-robomaster-c
遥控器模块开发
在 C 板上是提供了针对大疆遥控器的 DBUS 接口,但本片文章是基于 SBUS 进行遥控。
DBUS:100k波特率,8位数据位,1位停止位,偶校验(EVEN),无控流,18个字节;
SBUS:100k波特率,8位数据位,2位停止位,偶校验(EVEN),无控流,25个字节。
SBUS 和 DBUS 主要区别就是停止位不同,两者都需要硬件取反电路,因此 SBUS 的接收机也是可以直接插在 C 板提供的 DBUS 接口上进行使用的,只需要在软件层面修改数据解析处理即可。
串口DMA双缓冲
这里使用的是空闲中断 + DMA双缓冲的方案,改方案能够极大限度的提高处理高速数据的效率和稳定性。
但STM32不是所有芯片都支持DMA双缓冲,虽然也可以通过DMA半满中断实现双缓冲的效果,但是这样程序的兼容性是较差的;因此针对遥控器接收机的串口,选择不使用 RT-Thread 的串口驱动框架,也不是对其驱动框架进行改动。而是使用 HAL 库实现,但不会影响其他串口使用 RT-Thread 的串口驱动框架。
代码实现
首先是串口和 DMA 的初始化:
/* DMA controller clock enable */
__HAL_RCC_DMA1_CLK_ENABLE();
/* DMA1_Stream1_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA1_Stream1_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA1_Stream1_IRQn);
huart3.Instance = USART3;
huart3.Init.BaudRate = 100000;
huart3.Init.WordLength = UART_WORDLENGTH_9B;
huart3.Init.StopBits = UART_STOPBITS_2;
huart3.Init.Parity = UART_PARITY_EVEN;
huart3.Init.Mode = UART_MODE_TX_RX;
huart3.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart3.Init.OverSampling = UART_OVERSAMPLING_16;
HAL_UART_Init(&huart3);
以及 DMA 双缓冲功能的配置:
/**
@brief 串口 DMA 双缓冲初始化
@param rx1_buf 缓冲区1
@param rx2_buf 缓冲区2
@param dma_buf_num DMA缓冲区大小
*/
static void rc_doub_dma_init(uint8_t *rx1_buf, uint8_t *rx2_buf, uint16_t dma_buf_num)
{
//使能DMA串口接收
SET_BIT(huart3.Instance->CR3, USART_CR3_DMAR);
//使能空闲中断
__HAL_UART_ENABLE_IT(&huart3, UART_IT_IDLE);
//失效DMA
__HAL_DMA_DISABLE(&hdma_usart3_rx);
while(hdma_usart3_rx.Instance->CR & DMA_SxCR_EN)
{
__HAL_DMA_DISABLE(&hdma_usart3_rx);
}
hdma_usart3_rx.Instance->PAR = (uint32_t) & (USART3->DR);
//内存缓冲区1
hdma_usart3_rx.Instance->M0AR = (uint32_t)(rx1_buf);
//内存缓冲区2
hdma_usart3_rx.Instance->M1AR = (uint32_t)(rx2_buf);
//数据长度
hdma_usart3_rx.Instance->NDTR = dma_buf_num;
//使能双缓冲区
SET_BIT(hdma_usart3_rx.Instance->CR, DMA_SxCR_DBM);
//使能DMA
__HAL_DMA_ENABLE(&hdma_usart3_rx);
}
以及 CubeMX 的一些基本配置,这里就不细说了,设置完这些,串口空闲中断 + DMA双缓冲就开起来了,接下来就是要到串口中断处理函数里进行 DMA 双缓冲的接收和数据的解析处理了:
void USART3_IRQHandler(void)
{
if(huart3.Instance->SR & UART_FLAG_RXNE)
{
__HAL_UART_CLEAR_PEFLAG(&huart3);
}
else if(USART3->SR & UART_FLAG_IDLE)
{
static uint16_t this_time_rx_len = 0;
__HAL_UART_CLEAR_PEFLAG(&huart3);
if ((hdma_usart3_rx.Instance->CR & DMA_SxCR_CT) == RESET)
{
/* Current memory buffer used is Memory 0 /
//失效DMA
__HAL_DMA_DISABLE(&hdma_usart3_rx);
//get receive data length, length = set_data_length - remain_length
//获取接收数据长度,长度 = 设定长度 - 剩余长度
this_time_rx_len = SBUS_RX_BUF_NUM - hdma_usart3_rx.Instance->NDTR;
//重新设定数据长度
hdma_usart3_rx.Instance->NDTR = SBUS_RX_BUF_NUM;
//设定缓冲区1
hdma_usart3_rx.Instance->CR |= DMA_SxCR_CT;
//使能DMA
__HAL_DMA_ENABLE(&hdma_usart3_rx);
if(this_time_rx_len == SBUS_FRAME_SIZE)
{
//处理遥控器数据
sbus_rc_decode(sbus_rx_buf[0]);
rt_timer_start(rc_timer);
}
}
else
{
/ Current memory buffer used is Memory 1 */
//失效DMA
__HAL_DMA_DISABLE(&hdma_usart3_rx);
//get receive data length, length = set_data_length - remain_length
//获取接收数据长度,长度 = 设定长度 - 剩余长度
this_time_rx_len = SBUS_RX_BUF_NUM - hdma_usart3_rx.Instance->NDTR;
//重新设定数据长度
hdma_usart3_rx.Instance->NDTR = SBUS_RX_BUF_NUM;
//设定缓冲区0
DMA1_Stream1->CR &= ~(DMA_SxCR_CT);
//使能DMA
__HAL_DMA_ENABLE(&hdma_usart3_rx);
if(this_time_rx_len == SBUS_FRAME_SIZE)
{
//处理遥控器数据
sbus_rc_decode(sbus_rx_buf[1]);
rt_timer_start(rc_timer);
}
}
}
}
到这一步,已经可以顺利的接收并解析处理 SBUS 遥控数据了。
通过空闲中断我们可以确保完整的接收数据帧,而且使用 DMA 双缓冲以后,相较于普通的 DMA 接收处理高速数据更加高效快速,在处理一个缓冲区的数据之前,先将 DMA 切换到另外一个缓冲区,这样在处理数据的时候就不会影响到 DMA 数据的接收,而且针对遥控器这种实时要求高且解析简单的数据,就可以在中断处理函数中 DMA 缓冲区切换后直接进行解析处理。
STM32F4 系列是支持 DMA 双缓冲功能的,但是对于其他一些不支持双缓冲的芯片,也想要使用 pingpong 缓冲的话,就可以通过 DMA 半满中断实现。
抽象设备
这里将遥控器数据就简单的抽象为遥控器设备:
typedef struct
{
int16_t ch1; //右侧左右
int16_t ch2; //右侧上下
int16_t ch3; //左侧上下
int16_t ch4; //左侧左右
int16_t ch5; //左侧非线性旋钮
int16_t ch6; //右侧非线性旋钮
uint8_t sw1; //右侧长拨杆
uint8_t sw2; //左侧长拨杆
uint8_t sw3; //右侧短拨杆
uint8_t sw4; //左侧短拨杆
} rc_obj_t;
接收到数据存储在 rc_sbus.c 的 rc_data[2] 中:
rc_obj_t rc_data[2]; // [0]:当前数据NOW,[1]:上一次的数据LAST
通过调用 sbus_rc_init() 即可获得遥控器数据的地址,使用示例如下:
rc_obj_t rc_data[2]; // [0]:当前数据NOW,[1]:上一次的数据LAST
rc_data = sbus_rc_init();
-
缓冲器
+关注
关注
6文章
2237浏览量
49103 -
接收机
+关注
关注
9文章
1250浏览量
56529 -
串口驱动
+关注
关注
2文章
86浏览量
19497 -
STM32F407
+关注
关注
15文章
189浏览量
31815 -
RT-Thread
+关注
关注
32文章
1662浏览量
45506
发布评论请先 登录
基于RT-Thread的RoboMaster电控框架设计
RT-Thread开发,如何有效学习RT-Thread的五个步骤
RT-Thread全球技术大会:RT-Thread上的单元测试框架与运行测试用例
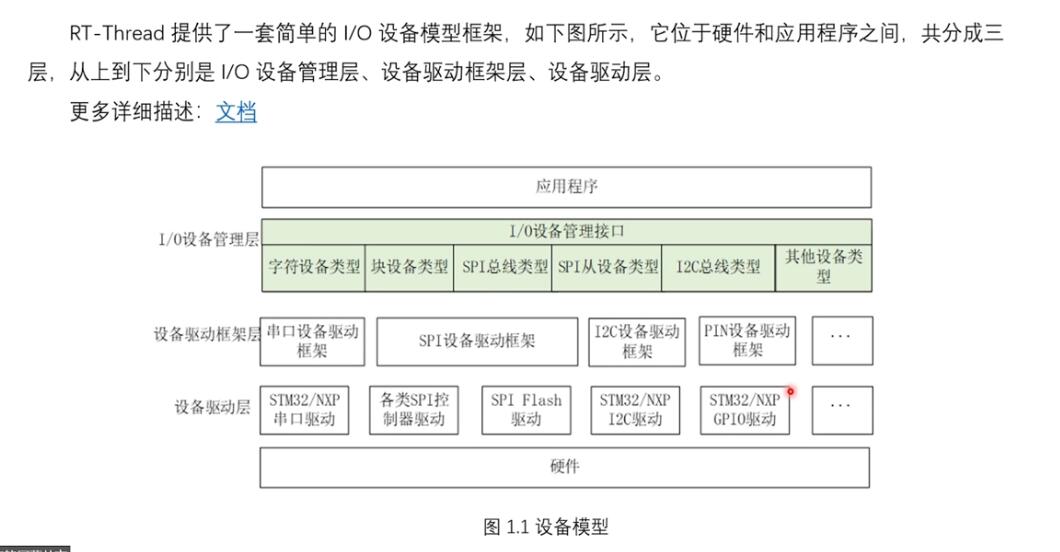

浅析RT-Thread设备驱动框架
基于 RT-Thread 的 RoboMaster 电控框架(一)
基于RT-Thread的RoboMaster电控框架(二)
基于RT-Thread的RoboMaster电控框架(三)
基于RT-Thread的RoboMaster电控框架(四)
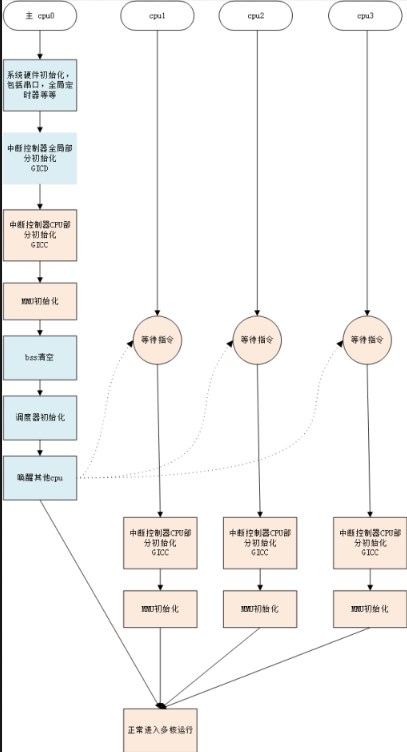
RT-Thread框架下的SMP支持
基于rt-thread的socket通信设计




评论