 使用XR806联调控制四足马术机器人
使用XR806联调控制四足马术机器人

XR806联调控制
四足马术机器人
本文为XR806开发板测评文章
作者:木头
1项目介绍
四足马术机器人
本项目使用XR806串口协议与大疆A板的stm32通讯,实现并联四足机器人的单腿运动学逆解与整体步态规划,本文将讲解项目所涉及的算法以及代码实现步骤。

四足马术机器人实物
2单腿运动学逆解
相关算法
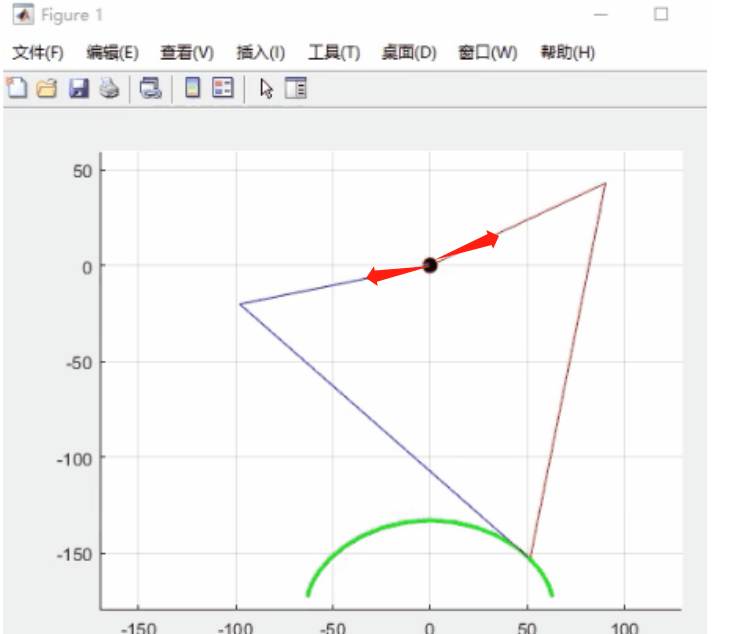
控制2个无刷电机(红色箭头各代表一个电机控制)并联成单足,经过角度闭环解算出足端轨迹,由足端做摆线轨迹(下图中绿色部分)形成类似于动物猫狗等单腿的运动
%摆线方程(matlab) sigma=2*pi*t/(Ts); xep=(xf-xs)*((sigma-sin(sigma))/(2*pi))+xs; zep=h*(1-cos(sigma))/2+zs; x=[x,xep]; z=[z,zep];
3整体步态规划
相关算法
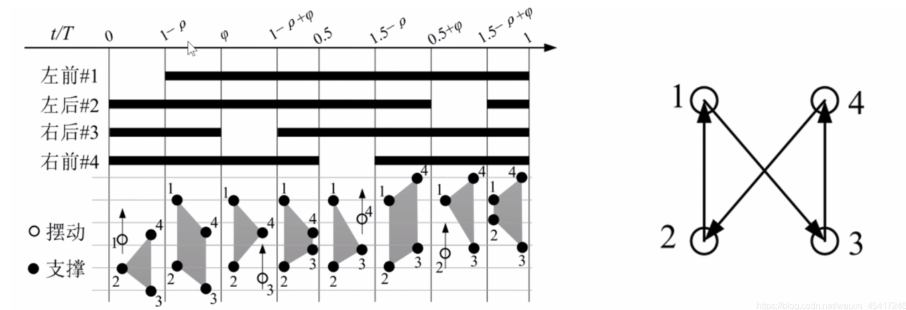
Walk步态是一种静态步态,即在运动过程中始终有三条腿处于支撑相,至多只有一条腿处于摆动相,四足动物在walk步态中四条腿最常见的轮换顺序为1→3→4→2→1。
4无刷电机角度速度
pid闭环
以P比例、I积分、D微分通过增量式PID使无刷电机能稳定的控制速度,角度使用pd控制函数如下
int Balance(float Angle,float Gyro,int Middle,float Balance_Kp,float Balance_Kd)
{
float Angle_bias,Gyro_bias;
int balance;
Angle_bias=Middle-Angle;
Gyro_bias=0-Gyro;
balance=Balance_Kp*Angle_bias+Gyro_bias*Balance_Kd;
return balance;
}
5关键功能实现
代码展示
XR806初始化串口配置:
if(HAL_UART_Init(UARTID, ¶m) != HAL_OK) return -1; /*使能DMA*/ if (HAL_UART_EnableTxDMA(UARTID) != HAL_OK) return -2; if (HAL_UART_EnableRxDMA(UARTID) != HAL_OK) return -3;
在main函数中while循环用下列函数发送对应数据:
HAL_UART_Transmit_DMA(UARTID, (uint8_t *)buffer,sizeof(buffer));
串口3接收回调,执行难对应的前进后退:
switch(RxBuffer_control)
{
case 'W': Motor_Control( 1, 1, 1, 1); break;
case 'S': Motor_Control(-1, -1, -1, -1); break;
case 'A': Motor_Control(-1, -1, 1, 1); break;
case 'D': Motor_Control( 1, 1, -1, -1); break;
case 'P': Motor_Control( 0, 0, 0, 0); break;
}
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31455浏览量
223680 -
串口
+关注
关注
15文章
1627浏览量
83357 -
开发板
+关注
关注
26文章
6425浏览量
120935 -
大疆
+关注
关注
30文章
924浏览量
84943 -
xr806
+关注
关注
0文章
14浏览量
1611
原文标题:让XR806控制四足机器人,单腿运动、步态规划都能行
文章出处:【微信号:gh_79acfa3aa3e3,微信公众号:全志在线】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
XR806芯片、XR806开源鸿蒙开发板简介
XR806芯片介绍XR806是全志科技旗下子公司广州芯之联研发设计的一款支持WiFi和BLE的高集成度无线MCU芯片,支持鸿蒙L0系统。具有集成度高、硬件设计简单、BOM成本低、安全可靠等优点
发表于 11-15 17:08
XR806芯片、XR806开源鸿蒙开发板简介
XR806芯片介绍XR806是全志科技旗下子公司广州芯之联研发设计的一款支持WiFi和BLE的高集成度无线MCU芯片,支持鸿蒙L0系统。具有集成度高、硬件设计简单、BOM成本低、安全可靠等优点
发表于 11-15 18:32
XR806芯片的mac地址要如何存放以及如何获取
XR806芯片系统异常重启如何解决?XR806芯片如何更换打印log口?XR806芯片的mac地址要如何存放以及如何获取?求解答
发表于 12-28 06:42
【直播预告】全志XR806芯片应用实战分享
/joinXR806优秀开发例程《基于OpenHarmony的棋子分拣机》《用全志XR806开源鸿蒙开发板做一个四足行走机器狗》《【
发表于 02-28 17:39
【直播预告】全志XR806芯片应用实战分享会!
/joinXR806优秀开发例程《基于OpenHarmony的棋子分拣机》《用全志XR806开源鸿蒙开发板做一个四足行走机器狗》《【
发表于 03-01 09:27
轻量系统:全志XR806(XR806AF2L)
开发板名称(芯片型号)
全志XR806(XR806AF2L)
芯片架构
CPU频率
介绍(字数请控制在200字以内)
XR806是全志科技旗下子公司广州芯之
发表于 10-19 11:14



评论