 2023年电赛E题国奖开源分享
2023年电赛E题国奖开源分享

2023年电赛E题 国奖
运动目标控制与自动追踪系统
团队介绍
奖 项:全国二等奖
学 校:重庆科技学院
作 者:陈杭 石登云 苟洪嘉
题目要求
一、任务
设计制作一个运动目标控制与自动追踪系统。系统包括:
2、指示自动追踪的绿色光斑位置控制系统。
系统结构示意及摆放位置见图 1(a)。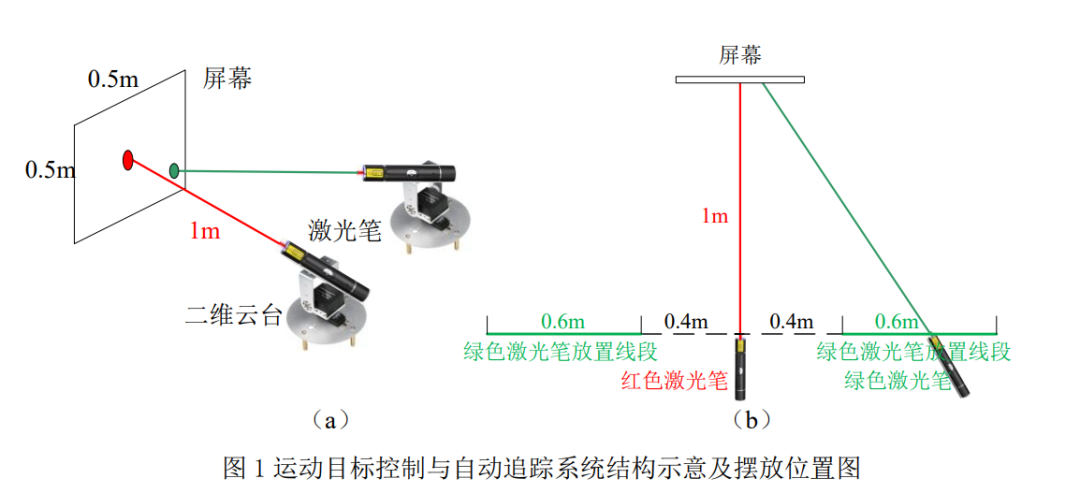
图中两个激光笔固定在各自独立的二维电控云台上。
红色激光笔发射的光斑用来模拟运动目标。光斑落在正前方距离 1m 处的白色屏幕上,光斑直径≤1cm。红色光斑位置控制系统控制光斑能在屏幕范围内任意移动。
绿色激光笔发射的光斑由绿色光斑位置系统控制,用于自动追踪屏幕上的红色光斑,指示目标的自动追踪效果,光斑直径≤1cm。
绿色激光笔放置线段如图 1(b)所示。
该线段与屏幕平行,位于红色激光笔两侧,距红色激光笔距离大于 0.4m、小于 1m。
绿色激光笔在两个放置线段上任意放置。
屏幕为白色,有效面积大于 0.6╳0.6m2。
用铅笔在屏幕中心画出一个边长0.5m的正方形,标识屏幕的边线;所画的正方形的中心为原点,用铅笔画出原点位置,所用铅笔痕迹宽≤1mm。
二、要求
1、设置运动目标位置复位功能。执行此功能,红色光斑能从屏幕任意位置回到原点。光斑中心距原点误差≤2cm。
2、启动运动目标控制系统。红色光斑能在 30 秒内沿屏幕四周边线顺时针移动一周,移动时光斑中心距边线距离≤2cm。
3、用约1.8cm宽的黑色电工胶带沿A4纸四边贴一个长方形,构成A4靶纸。将此A4靶纸贴在屏幕自定的位置。启动运动目标控制系统,红色光斑能在30秒内沿胶带顺时针移动一周。超时不得分,光斑完全脱离胶带一次扣2分,连续脱离胶带移动5cm以上记为0分。
4、将上述 A4 靶纸以任意旋转角度贴在屏幕任意位置。启动运动目标控制系统,要求同(3)。
设计要求
一、运动目标控制理论
在运动控制系统中,基于OpenMV识别目标点及轨迹并传送坐标数据给MCU,由主控MCU调整PWM输出占空比实现对舵机运动参数的调整,从而控制云台转动实现对运动目标的复位、轨迹移动、循迹等功能。首先,将OpenMV固定在合适位置以观测到完整的目标屏幕,利用OpenMV识别红色激光返回的坐标点(以下简称红斑),将激光笔依次在屏幕上移动。基于基础题2要求,用激光笔在屏幕铅笔画的边线上标记8个坐标点(拥有四个顶点,每两个顶点之间各取一个中点),分别按下按键记录坐标在MCU中,最后控制二维云台依次将记录的每一个点都走一遍。(运动目标控制皆使用记录坐标构建坐标系的方法)
对于运动控制系统的循迹功能(基础题目3,4),需要通过OpenMV完成对黑色A4纸边框的识别以确定矩形顶点坐标,利用顶点坐标分别计算出矩形四条边框斜率,基于顶点及边框斜率计算得到每条边框上的20个标记点(经过测试,20个标记点效果较为理想)。最后识别红斑坐标,控制二维云台依次沿标记点完成移动,即可实现对黑色矩形的循迹功能。
二、自动追踪系统方法
在自动追踪系统中,OpenMV需要完成对红斑以及绿色激光笔的识别(以下简称绿斑),因此需要单独将OpenMV固定在二维云台旁边,不随云台移动。OpenMV将识别d的坐标数据通过串口返回到主控端,系统中对红斑和绿斑设定有不同的帧头帧尾防止误判,主控接收到坐标数据之后再分别对它们的横纵坐标值相减以获取两运动目标的相对距离。根据两坐标差值的正负,可获知两光斑的相对坐标位置。这时只需要利用红色和绿色X、Y轴的差值,最后控制二维云台的x,y轴增加或者减小角度即可。
在测试过程中,发现PWM舵机偶尔莫名抖动,分析这是由于坐标数据存在噪声导致。因此,本项目中采用采用卡尔曼滤波对OpenMV传送的坐标数据进行对其滤波,具体公式如下:
从而让OpenMV反馈回来的坐标与驱动MG995舵机变得更加稳定,能够完成设计要求。
A:状态转移矩阵
X(k-1):k-1时刻 状态最优估计值 B:控制输入矩阵
U(k):k时刻 状态输入控制量
W(k):k时刻 卡尔曼增益
设计图
运动控制系统硬件原理图
自动追踪系统硬件原理图
控制程序流程图
自动跟踪系统主流程图
自动跟踪系统串口流程
自动跟踪系统OpenMV流程图
获奖团队参赛心得与经验分享
编者以(以下为参赛团队自述)2023年第十六届全国大学生电子设计竞赛为例,简单概述所指导团队参赛过程及注意事项,以供读者参考。
正式比赛前一天,应提醒参赛队员合理分配时间,保证充足的休息时间以具备良好体力,以应对接下来四天三夜高强度工作的挑战。
第一天
比赛赛题一般会在比赛第一天早上公布,在此之后,参赛团队与指导老师充分讨论各题型关键技术及可能出现的问题。迅速确定最终选题,并做好队员之间的任务分工,以保证人力资源得到充分利用。
比赛初期,对题目进行详细分析,确定设计方案及技术难点,统计所需元件清单,做好元器件及耗材的选型及补充购置工作。其中,较为关键的环节是方案设计阶段,一套有效、良好的技术方案能够规避大多数可能出现的技术问题。因此,比赛第一天不必急于动手,队员之间可充分讨论商讨,尽量确定一套前期资源充足的、符合队伍实力的、较为合理的解决方案。
第二天
根据所确定的技术方案,对材料进行整理,并利用已经具备的硬件资源,设计出基本模型。以本案例设计团队为例,由于在前期准备中,参赛队员针对CW32F030芯片作了大量的训练,积累了较多的实战经验。因此,在此次比赛中迅速确定了将CW32F030芯片作为主控MCU。另外,结合硬件资源及开发难易程度,确定使用OpenMV为视觉识别模块,以MG995舵机搭建二维简易云台搭载激光笔。
第三天
确立好硬件部分的材料以及场地的简易搭建,整理好所有思路,本小组开始全力攻克赛题。在前两天中也在尝试做本题,但也只是顺着题目做了雏形,勾勒大概题目要求,精度尚与赛题要求有一段距离。本小组也逐渐进入状态,不断提高精度并尝试脱机调试,同时整理资料进行撰写报告与测试方案。
第四天
整理所有的资料以及代码,作品开始准备完全脱机操作,报告实时跟进作品进度。完全脱机调试后,使用测试方案进行调试,最后更改场地的位置和光线的强弱进行脱机操作调试,作品很好的完成所选赛题要求,完成报告撰写后,整理个人资料,作品封箱。
经历
我们在过程中遇到的最大问题是在脱机操作上,刚开始本小组利用固定坐标方式做E题赛题的运动控制系统,让舵机云台采集每一个固定坐标,让舵机云台按照逻辑进行行动,从而满足赛题要求,但在这个过程中舵机云台的有一点移动,它所变现的坐标与之前表现的坐标相差甚远,对位置的要求极高,另一个场地显然不可能百分百复刻。小组便开始尝试更改思维,先更改到利用算法处理舵机云台反馈的坐标点,但始终达不到满意的精度效果。后面小组决定在源头改变,不再利用舵机云台反馈坐标,利用open MV进行坐标定位并通过MCU记住坐标,这样可以跳出固定思维,可以让作品在更改场地的情况下随时确定坐标参数,再让舵机云台按照逻辑进行行动,从而满足赛题要求。最后,本团队配合默契,斩获2023ti杯国家二等奖。
审核编辑 黄宇
-
控制系统
+关注
关注
41文章
6986浏览量
114372 -
开源
+关注
关注
3文章
4329浏览量
46430 -
CW32
+关注
关注
1文章
323浏览量
1955
发布评论请先 登录
划重点!为什么这些项目能拿国赛一等奖

国星光电参与项目荣获神农中华农业科技奖二等奖
德赛电池荣获2025行家极光奖年度优秀产品奖
德赛电池荣获2025高工金球奖年度十大技术奖
德赛西威斩获2025高工金球奖两项荣誉
电科网安荣获第三届国新杯ESG科技引领金牛奖
openDACS 2025 开源EDA与芯片赛项 赛题七:基于大模型的生成式原理图设计
【精选直播】openDACS 2025 开源EDA与芯片大赛 赛题五 赛题七 直播宣讲会

【精选直播】openDACS 2025 开源EDA与芯片大赛 赛题六 赛题三 直播宣讲会
【精选直播】openDACS 2025 开源EDA与芯片大赛 赛题二 赛题四 直播宣讲会
【精选直播】openDACS2025开源EDA与芯片赛宣讲 赛题一:网表评估和优化
【赛题补充说明】2025全国大学生FPGA创新设计竞赛紫光同创杯赛

【嘉楠堪智K230开发板试用体验】高校竞赛-2025电赛-E题
【赛题知多少】 紫光同创赛题答疑专场|2025年全国大学生嵌入式芯片与系统设计竞赛FPGA赛道



评论