 AUTOSAR实战教程-通信协议栈介绍
AUTOSAR实战教程-通信协议栈介绍

1.DBC属性与信号流
1.1 DBC属性决定报文类型
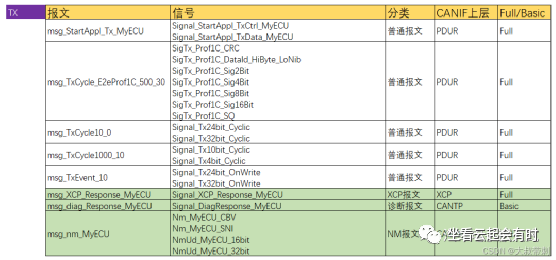
不同的DBC属性决定不同功能的报文, 一般实际项目中涉及的报文为4类:应用报文,诊断报文,网络管理报文,XCP报文。不同作用的报文其在协议栈中的信号流路径是不同的。
参考Vector给出的《TechnicalReference_DbcRules_Vector》文档,在DBC文件中对关键属性Attributes的规定如下。
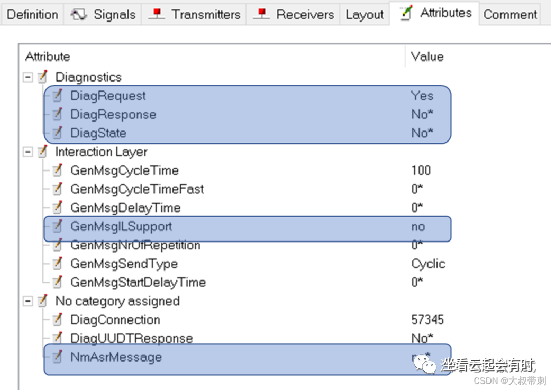
应用报文:GenMsgILSupport:Yes
网络管理报文Yes
XCP报文:
根据《TechnicalReference_DbcRules_Vector》规定只要Message中含有大写XCP字样,即可在导入DBC后被Vector的工具自动识别为XCP报文。其他属性同“应用报文:GenMsgILSupport:Yes”
如果不用1的方式,也可以在CANIF模块里手动设置其上层模块Upper Layer(PduUserTxConfirmationUL)为XCP模块。其他属性同“应用报文:GenMsgILSupport:Yes”
诊断报文:
功能寻址Yes
物理寻址请求Yes
物理寻址响应Yes(物理寻址和功能寻址的区别请自行摆渡)
1.2 报文类型决定信号流路径
以TX报文为例:
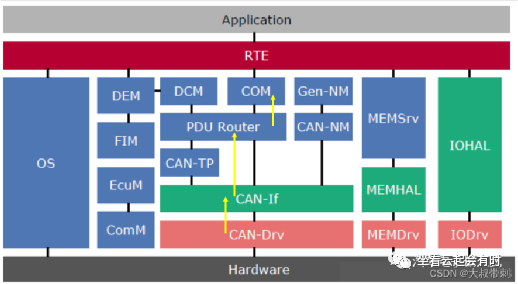
普通报文路径:CAN->CANIF->PDUR->COM
诊断报文路径:CAN->CANIF->CANTP->PDUR->DCM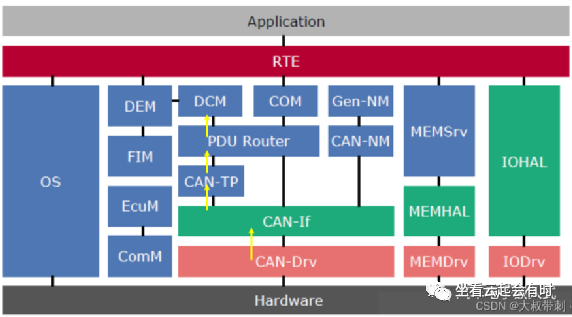
XCP报文路径:CAN->CANIF->XCP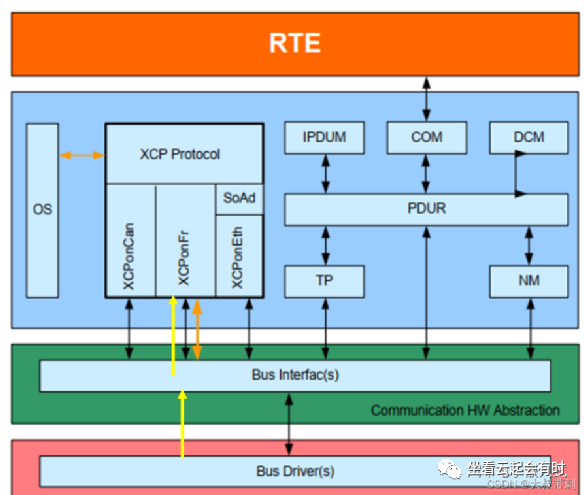
网络管理报文路径:CAN->CANIF->CANNM
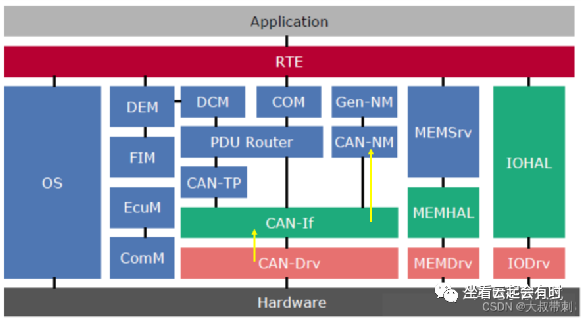
之所以把PDUR标红,是因为在下面的配置中方便我们识别PDUR的相关模块,这个要在PduRBswModules配置项中选择的!从这里也可以直接确定,PDUR的PduRBswModules上下文最多只有CANIF,COM,CANTP,DCM。
2. 配置实践
DBC如下:
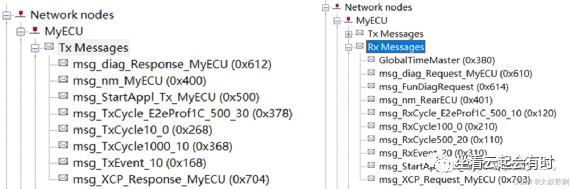
我习惯将DBC中所有报文简单罗列到一个表中,按报文功能进行分类。这样结合上面我们的总结,就对于每个报文的路径有一个全局的了解。如果项目比较大,报文较多的情况,建议将普通报文之外的报文(NM报文,XCP报文,诊断报文)列出来,因为他们特殊啊!
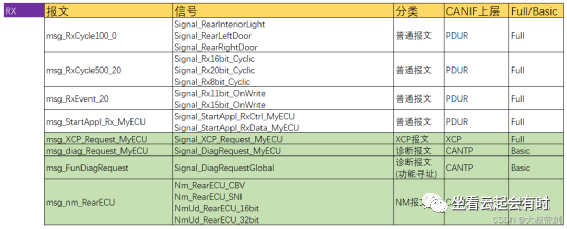
通过观察DBC属性,制作报文分类表格:
好,接下来进入我们的实战环节。
导入DBC,Update工程, 现在看工具自动配置中遇到的错误还是比较多的, 所以我们接下来的任务就是将这些模块的错误全部Fixed掉!
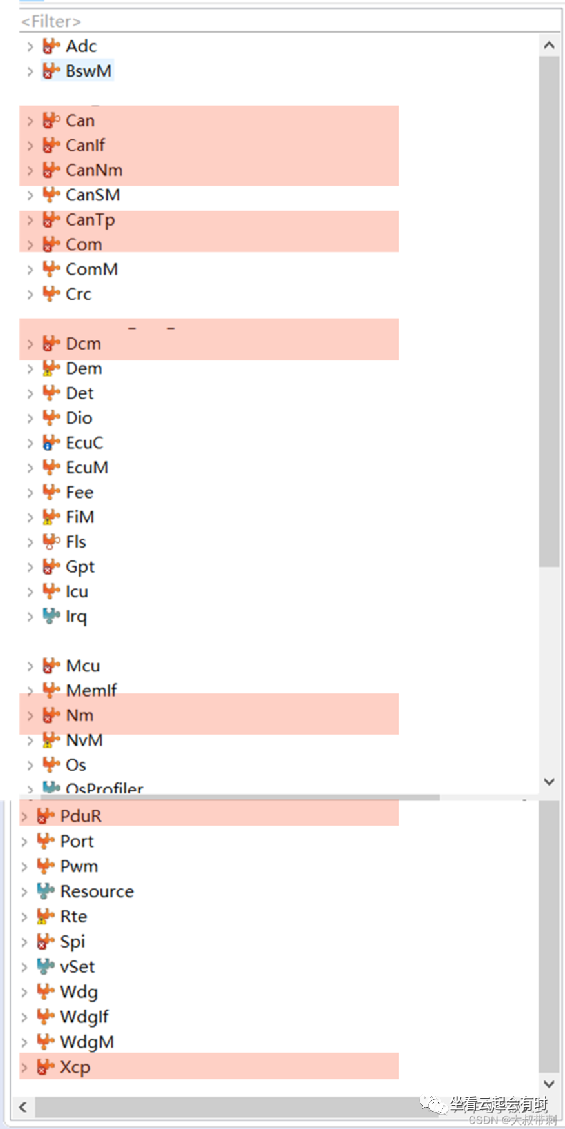
2.1 搞定信号路径
2.1.1 ECUC模块
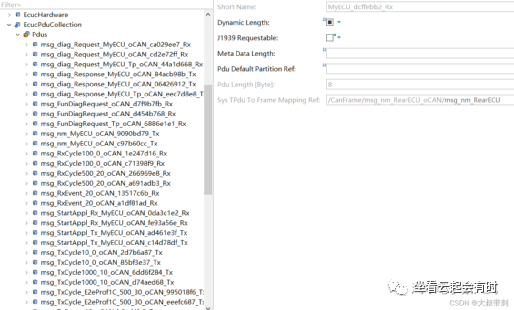
EcucPduCollection这个Container的作用.数据在CAN通信协议栈各层间都是以PDU形式传输的,为了将各层PDU关联起来,则需要定义全局 PDU(Global PDU)。由于全局PDU不属于任何一个标准BSW模块,所 以AUTOSAR提出了一个EcuC模块来收集一些配置信息。在EcuC模块中定义全局PDU时不需要关心其数据类型,只需要定义PDU长度即可。
所以我们先对照DBC对照检查以下,ECUC/EcucPduCollection对各个PDU(PDU是啥?你可以简单理解成一个PDU就对应总线上的一个Message再附上一个地址信息的这么一个玩意--虽然这种说法不准确,但是它能有助于你去理解)的长度定义是否正确,至于长度之外的错误,先忽略之,后面其他模块配好之后,ECUC中相关错误一般就自动消失了.
2.1.2CAN模块
CAN模块是直接面向硬件的, 所以CAN模块主要的配置分2部分:
对CAN控制器的配置,包括,参考时钟, 波特率,采样点,帧类型,处理方式Polling/Interrupt;
和CANIF的联系,即对Hoh和MailBox和Filter的配置)
CAN控制器的配置
本阶段我们只关注CAN控制器的配置! (在后面的步骤中再重点配置Hoh和MailBox和Filte,所以本阶段这三方面的错误先忽略!)
CAN控制器的配置还是比较容易的,如果有什么错误一般根据工具里面给出的提示即可轻易解决。这里科普2个基本知识点, 也是CAN模块一个稍微难懂的概念 - CAN的时钟, CAN的重同步和采样点.
CAN时钟

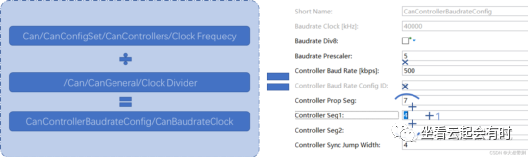
Can/CanConfigSet/CanControllers/Clock Frequecy这个值是从芯片的时钟树分频而来, 在MCAL的MCU模块中指定.
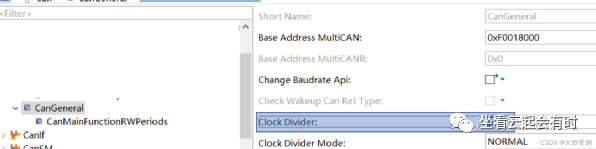
/Can/CanGeneral/Clock Divider是对上面Can/CanConfigSet/CanControllers/Clock Frequecy的分频, 他们相除的结果在CanControllerBaudrateConfig/CanBaudrateClock中, 比如
Clock Frequecy = 40M, Clock Divider = 1, 则CanBaudrateClock= 40M = 40000KHz.

重同步和采样点
参考文献《CAN总线学习笔记(5)- CAN通信的位定时与同步》这篇博文有非常详尽的介绍( 如果是Tir1,一般OEM会给出具体的采样点参数值, Autosar工具也会给出参考值)我在这就蜻蜓点水说以下计算原则。
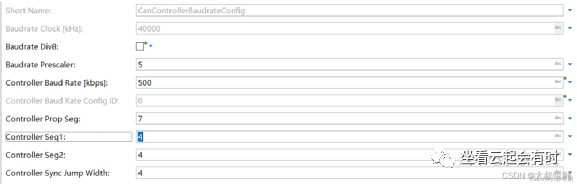
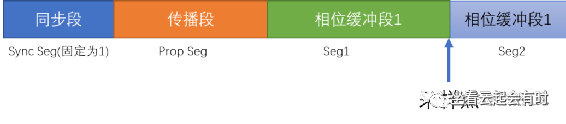
Sync Seg(同步段):长度固定为1Tq, 所以配置工具中没有它的配置.
在Vector的配置工具中, 定义Prop+Seg1 = TSeg1, Seg2 = TSeg2,一开始感觉后别扭,后来发现这样也好,计算采样点位置更加方便了,比如采样点为80%:
(同步段(1) + TSeg1)/(同步段+Tseg1+Tseg2) = 80%,
如果一个BitTime中Tq总和固定了,比如为16个Tq,
同步段(1) + TSeg1 + TSeg2 = 16
根据这个二元一次方程组则很容易算出各段的值.
Sync Seg固定为1, TSeg1 = 11, Seg2 = 4.
SyncJumpWidth:它的值是用于调整相位缓冲段1和相位缓冲段2的值, 用于CAN的同步,比如相位缓冲段1向前增长了3个,则相位缓冲段2向后减少3个Tq.---也就是一次同步中相位缓冲段改变的长度.所以Sync Jump Width的设置有2个原则:
Sync Jump Width <= 3,
Sync Jump Width <= Min(Seg1, Seg2), 因为一次同步调整的幅度不能超出相位缓冲段1和2中任意一个!
敲黑板了,下面画重点:
好了,截止目前,我们把CAN模块的1/2错误都消掉了, 剩下CanHardwareObjects这个容器里面的错误,我们先放下。继续下一步。
2.1.3CANIF模块
CANIF的配置主要分2部分
向上:指定各个PDU的上层模块
向下:对Hoh的配置(配置PDU的HOh,对应MailBox和Bufffer,CAN帧的类型)
这一步我们只关注它"向上:指定各个PDU的上层模块"的功能.
检查各个PDU的上层模块
主要配置/CanIf/CanIfInitCfg/CanIfRxPduCfgs和/CanIf/CanIfInitCfg/CanIfTxPduCfgs这两个小container
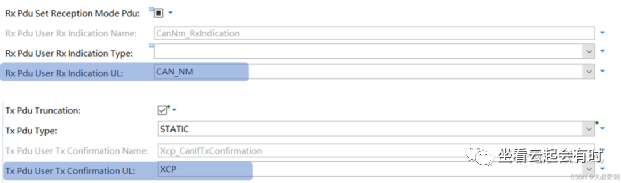
结合我们上面讲的知识, 检查Davinci Cfg工具/CANIF/Pdu User Tx/Rx Confirmation UL这个配置项对PDU的上层配置是否正确, 即:
诊断报文: CANIF之上是CANTP,(CAN->CANIF->CANTP->PDUR->DCM)
NM报文:CANIF之上是CANNM,(CAN->CANIF->CANNM)
XCP报文:CANIF之上是XCP,(CAN->CANIF->XCP)
普通报文:CANIF之上是PDUR, (CAN->CANIF->PDUR->COM)
如果出现如下错误:
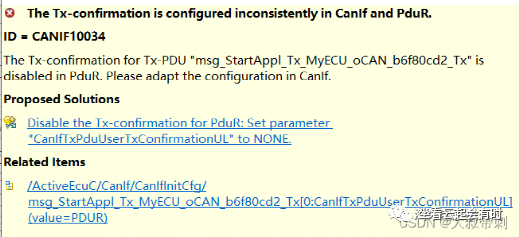
如果不需要Confirmation功能,则可以将Confirmation UL配置项中设为NONE -- 只要到对应模块中检查该PDU确实存在。比如:普通应用报文PDUa,它的上层应该是PDUR, 我们去PDUR中检查,如果它确实被映射到PDUR中了, 则可以在CANIF中将它的Confirmation UL设为NONE.
该容器(/CanIf/CanIfInitCfg/CanIfRxPduCfgs和/CanIf/CanIfInitCfg/CanIfTxPduCfgs)下其他的一些小错误根据工具提示修改即可.

剩下的错误在后面的操作中解决。
2.1.4XCP模块
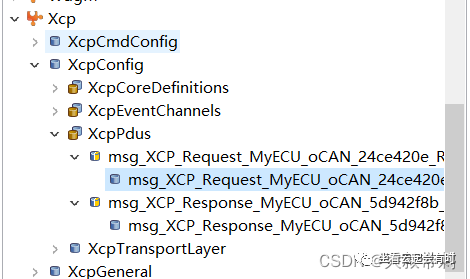
主要是配置XCP中用于接收和发送的PDU,如果XcpPdus这一块有错误,则检查你在DBC中和CANIF中指定的XCP收发报文是否已经在XCP中Mapping上了,其他小错误根据提示修改即可。
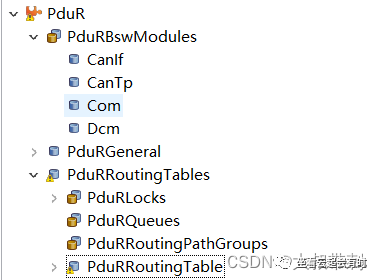
2.1.5PDUR模块
PDUR主要有2个作用:对信号的路由,对不同总线信号的网关。
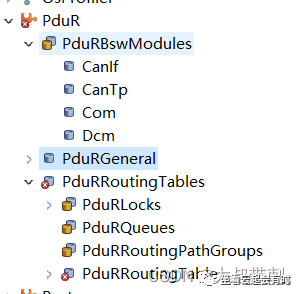
PduRBswModules指定PDUR的上下文模块
根据我们上面的描述,PDUR向下向上的模块分别是:
普通报文: CANIF->PUDR->COM
诊断报文:CANTP->PDUR>DCM
XCP报文和NM报文绕过PDUR。
所以如果你的网咯中没有诊断报文,则PDURBswModules中,PDUR的上下层是CANIF和COM
如果有诊断报文,则PDURBswModules中,PDUR的上下层是CANIF,COM,DCM,CANTP.
PduRRoutingTables
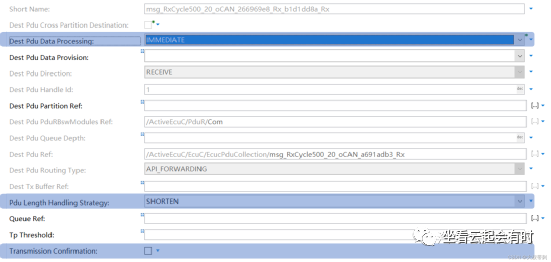
一般工具自动生成的配置,出现错误就在这三个地方。
PduR Transmission Confirmation这个错误主要是由于PDUR的上下层Confirmation没有一致,比如一个TX信号,CANIF中将Confirmation UL指定为PDUR,而在PDUR中将Transmission Confirmation设为False,则自然会报错;又或者在CANIF中将Confirmation UL设为NONE, 而在PDUR中将Transmission Confirmation设为True,则自然会报错。
其他小错误根据提示修改即可。
2.1.6COM模块
COM模块非常简单,其作用就是将总线上的Msg进行卸货或者装车,装车:将信号组装到Msg里面;卸货:将Msg拆分成一个个的信号,给应用层或者CDD使用.
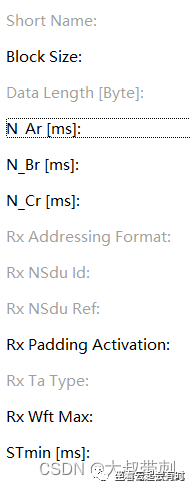
2.1.7CANTP模块
因为诊断协议中有多帧连续帧的概念,有些报文一帧是发不完的, 所以CANTp模块的主要作用是对CAN I-PDU进行分段和重新组装,使得I-PDU的长度不大于8个字节,对CAN FD而言,CAN I-PDU不大于64个字节。
这里面的难点应该就是一些时间参数的设定, 这个要结合UDS的14229/15765/11898和主机厂释放的网络规范进行设定.
2.2 搞定Hoh和MailBox
(有朋友反应这一块有很多错误,好吧,我们先讲这一块)
CAN模块下面的CanHardwareObjects其实就是MailBox,是硬件上的存在。CANIF下面的Hoh包含Hrh(接收)和Hth(发送)是报文收发的句柄,是一个软件概念。
结合我们上面的工作, 我接下来主要是对
CAN部分MailBox和Filter的配置
CANIF部分Hoh的配置
2.2.1 CAN模块中MailBox配置
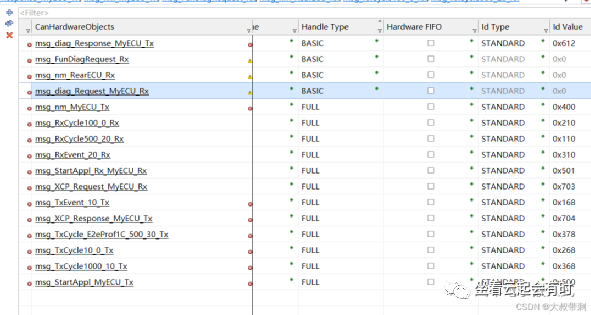
CanHardwareObjects
先检查CanHardwareObjects这个容器下面, 检查HardwareObject的数量.注意此时HardwareObject还没有和CANIF中的PDU建立任何关系!--这模块的HardwareObject我习惯叫它MailBox!
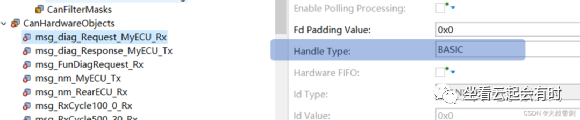
根据DBC中Message个数, 设置CAN模块下面每个CanHardwareObjects(就是MailBox)的CanHandleType,设为Full CAN还是Basic CAN.
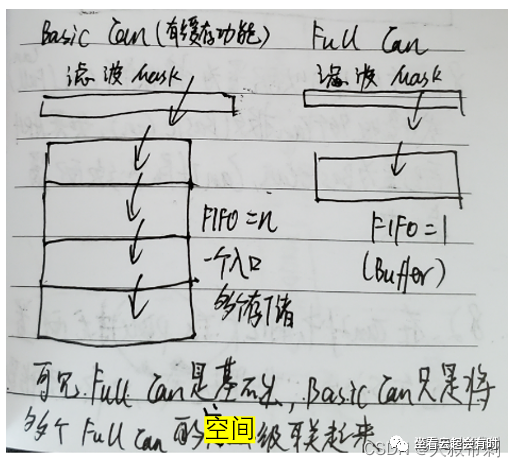
Full CAN和Basic CAN
先说结论:
Full CAN一个Hoh对应一个MailBox而Basic CAN一个MailBox可以处理多个PDU.
Full CAN是硬件滤波而Basic CAN软件滤波,因此配成Basic的要设置滤波.
Full CAN一个Buffer对应一个ID报文,无缓存功能而Basic CAN以FIFO的方式接受特定的多个报文,有缓存功能.
因此:
对于诊断报文和NM报文的接收报文必须配置成Basic Can,
其他报文最好配成高效的Full CAN.
关于Full CAN和Basic CAN, 这篇文章讲的很详细《【AUTOSAR-CAN】CAN的 “BasicCAN架构” 和 “FullCAN架构”》, 这里我说一下我的理解, 不一定很准确,但有助于理解.
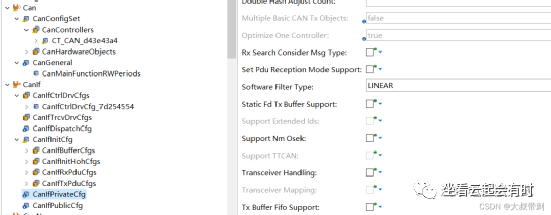
如果你在CanHardwareObjects这个容器下面配置的BasicCAN个数>1(Tx MailBox>1个或者Rx的MailBox>1个)这个时候你应该会遇到一个报错:
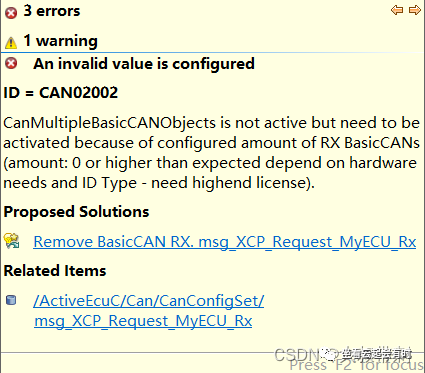
这是翻译成人话就是你没有使能Multi BasicCAN或者你么有更高级的授权, 而这个时候你进入CanGeneral这个容器下面却发现不允许使能Multi BasicCAN!!
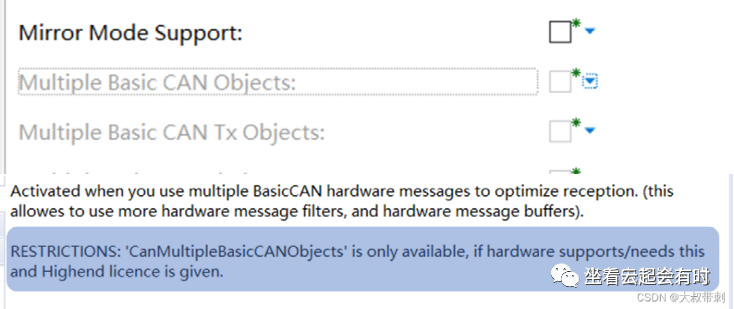
是不是很崩溃?---没关系, 按下面这样做:
将所有Tx的BasicCAN删除到只剩一个, Rx的BasicCAN删除只剩一个,然后命名(随个人喜好)TxBasicCanMailBoxCommon和RxBasicCanMailBoxCommon.然后设置其Size大小为之前所有BasicCAN的MailBox总和!
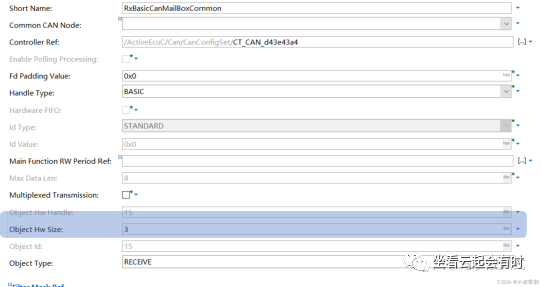
最后别忘了给接收的BasicCAN设置滤波,并绑定:
在CanFilterMasks下面设置滤波, 在BasicCAN的MailBox下面设置映射:
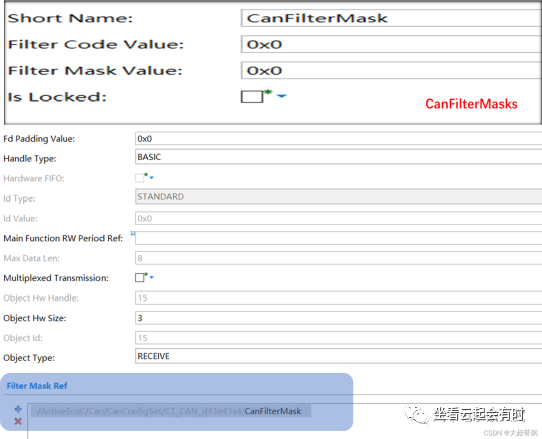
再科普以下滤波的设置:
滤波参数
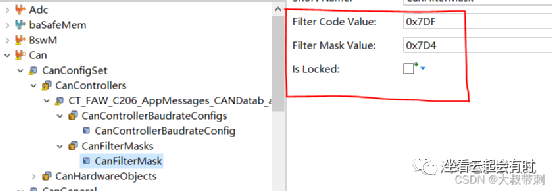
白名单模式计算原则是:received ID & Mask == Code & Mask.
有一个简便的方法就是,Code Value里面填写ID大的那个ID值, Mask Value里面填写ID小的那个ID值两个数按位与后的值.
例如:我只想接受0x7DF和0x7D4这两个报文,将其他报文过滤掉. 根据计算公式,对于0x7DF报文,
0x7DF & 0x7D4 == 0x7DF & 0x7D4
对于0x7D4报文, 0x7D4 & 0x7D4 == 0x7DF & 0x7D4
好了,纵然现在千般错, 先放过.去CANIF模块!
2.2.2 CANIF模块中的PDU(Rx和Tx PDU)
进入/CanIf/CanIfInitCfg/CanIfInitHohCfgs/CanIfInitHohCfg/CanIfHrhCfgs这个下面,
将诊断Rx PDU和网络管理的Rx PDU(他们是Basic Can)都映射到CAN模块下面的RxBasicCanMailBoxCommon上!并勾选CanIfHrhSoftwareFilter.
将XCP报文和普通应用报文与CAN模块下面的MailBox进行一对一映射!--因为他们是FULL CAN!
并取消CanIfHrhSoftwareFilter.
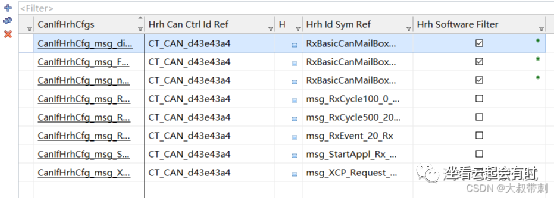
进入/CanIf/CanIfInitCfg/CanIfInitHohCfgs/CanIfInitHohCfg/CanIfHthCfgs这个下面,安装上面的步骤操作即可!
接下来为Tx的PDU配置Buffer即可!
其他一些错误根据工具提示修复即可.这一块相互绑定关系我做个图谱:
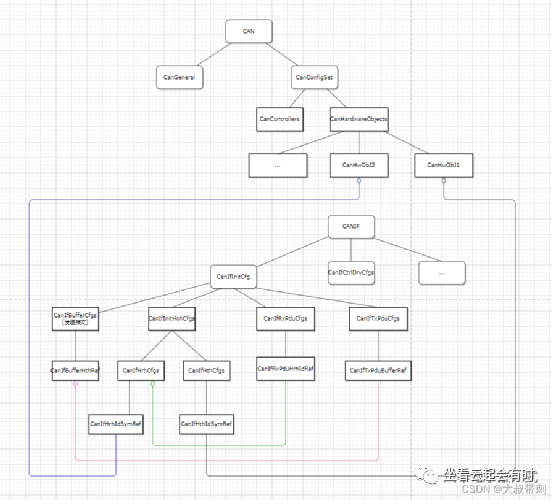
截止目前CAN和CANIF的错误就全部消除了
来源:坐看云起会有时
审核编辑:刘清
-
缓冲器
+关注
关注
6文章
2237浏览量
49107 -
AUTOSAR
+关注
关注
11文章
414浏览量
23806 -
PDU
+关注
关注
0文章
102浏览量
17866 -
DBC
+关注
关注
2文章
66浏览量
8449 -
CAN控制器
+关注
关注
3文章
81浏览量
15762
原文标题:AUTOSAR实战教程 - 通信协议栈
文章出处:【微信号:谈思实验室,微信公众号:谈思实验室】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
8种物联网通信协议介绍
如何开发符合AUTOSAR规范的电机控制器软件
基于嵌入式的实时通信协议栈研究与设计
在FPGA中实现嵌入式TCP/IP通信协议栈

AUTOSAR中通信协议栈配置详解
AUTOSAR经典平台介绍
CAN协议栈与LIN协议栈介绍
AUTOSAR通信协议解析 如何实现AUTOSAR通信
AUTOSAR通信实现中的常见问题
AUTOSAR通信对自动驾驶的影响 AUTOSAR通信与嵌入式系统设计
车载以太网通信协议栈如何测?UT和SP联手!




评论