 ROS是如何实现XMLRPC的
ROS是如何实现XMLRPC的

XMLRPC的C++代码在下载后的ros_comm-noetic-develutilitiesxmlrpcpp路径下。
还好,整个工程不算太大。XMLRPC分成客户端和服务器端两大部分。
咱们先看客户端,主要代码在XmlRpcClient.cpp文件里。
擒贼先擒王,XmlRpcClient.cpp文件中最核心的函数就是execute,用于执行远程调用,代码如下。
// Execute the named procedure on the remote server.
// Params should be an array of the arguments for the method.
// Returns true if the request was sent and a result received (although the result might be a fault).
bool XmlRpcClient::execute(const char* method, XmlRpcValue const& params, XmlRpcValue& result)
{
XmlRpcUtil::log(1, "XmlRpcClient::execute: method %s (_connectionState %s).", method, connectionStateStr(_connectionState));
// This is not a thread-safe operation, if you want to do multithreading, use separate
// clients for each thread. If you want to protect yourself from multiple threads
// accessing the same client, replace this code with a real mutex.
if (_executing)
return false;
_executing = true;
ClearFlagOnExit cf(_executing);
_sendAttempts = 0;
_isFault = false;
if ( ! setupConnection())
return false;
if ( ! generateRequest(method, params))
return false;
result.clear();
double msTime = -1.0; // Process until exit is called
_disp.work(msTime);
if (_connectionState != IDLE || ! parseResponse(result)) {
_header = "";
return false;
}
// close() if server does not supports HTTP1.1
// otherwise, reusing the socket to write leads to a SIGPIPE because
// the remote server could shut down the corresponding socket.
if (_header.find("HTTP/1.1 200 OK", 0, 15) != 0) {
close();
}
XmlRpcUtil::log(1, "XmlRpcClient::execute: method %s completed.", method);
_header = "";
_response = "";
return true;
}
它首先调用setupConnection()函数与服务器端建立连接。
连接成功后,调用generateRequest()函数生成发送请求报文。
XMLRPC请求报文的头部又交给generateHeader()函数做了,代码如下。
// Prepend http headers
std::string XmlRpcClient::generateHeader(size_t length) const
{
std::string header =
"POST " + _uri + " HTTP/1.1rn"
"User-Agent: ";
header += XMLRPC_VERSION;
header += "rnHost: ";
header += _host;
char buff[40];
std::snprintf(buff,40,":%drn", _port);
header += buff;
header += "Content-Type: text/xmlrnContent-length: ";
std::snprintf(buff,40,"%zurnrn", length);
return header + buff;
}
主体部分则先将远程调用的方法和参数变成XML格式,generateRequest()函数再将头部和主体组合成完整的报文,如下:
std::string header = generateHeader(body.length());
_request = header + body;
把报文发给服务器后,就开始静静地等待。
一旦接收到服务器返回的报文后,就调用parseResponse函数解析报文数据,也就是把XML格式变成纯净的数据格式。
我们发现,XMLRPC使用了socket功能实现客户端和服务器通信。
我们搜索socket这个单词,发现它原始的意思是插座。这非常形象,建立连接实现通信就像把插头插入插座。
虽说XMLRPC也是ROS的一部分,但它毕竟只是一个基础功能,我们会用即可,暂时不去探究其实现细节,
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
客户端
+关注
关注
1文章
307浏览量
17680 -
服务端
+关注
关注
0文章
69浏览量
7394 -
ROS
+关注
关注
1文章
296浏览量
18900
发布评论请先 登录
相关推荐
热点推荐
ROS与STM32是如何进行通信的
角速度、实际线速度STM32端ROS端之前运行的ROS项目都是在终端编译,用vim或者gedit修改代码,很不方便,函数跳转查看都没办法实现。所以今天先安装一个IDE试试ROS官网上有
发表于 08-11 07:25
什么是ROS?ROS产生、发展和壮大的原因和意义
机器人操作系统(ROS)入门(嵌入式系统应用开发)一、ROS 基本问题1. 什么是 ROS2. ROS 产生、发展和壮大的原因和意义二、安装 ROS
发表于 12-17 06:08
ROS与STM32通信
角速度、实际线速度STM32端ROS端之前运行的ROS项目都是在终端编译,用vim或者gedit修改代码,很不方便,函数跳转查看都没办法实现。所以今天先安装一个IDE试试ROS官网上有
发表于 12-24 19:00
•12次下载

ROS机器人操作系统的实现原理(上)
本文介绍ROS机器人操作系统(Robot Operating System)的实现原理,从最底层分析ROS代码是如何实现的。
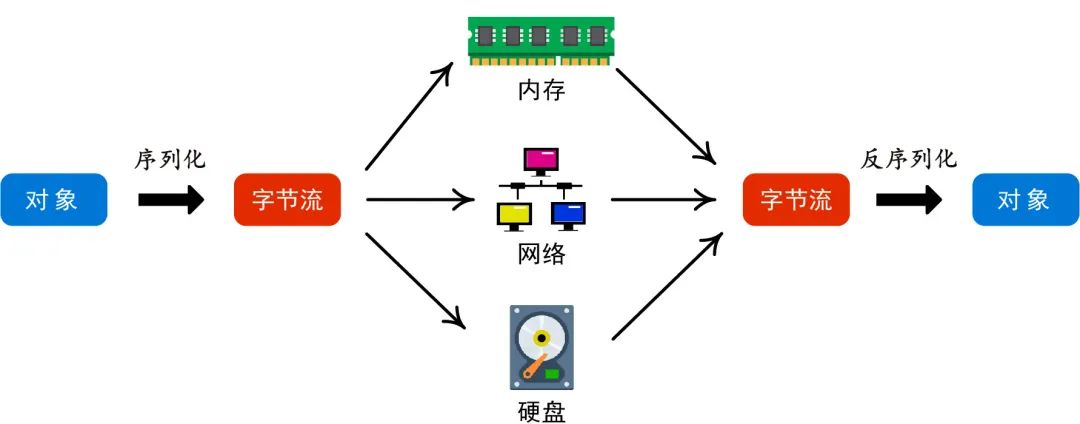
**1、序列化**
把通信的内容(也就是消息m
ROS机器人操作系统的实现原理(下)
本文介绍ROS机器人操作系统(Robot Operating System)的实现原理,从最底层分析ROS代码是如何实现的。
**1、序列化**
把通信的内容(也就是消息m
实现ARM+ROS(机器人操作系统)之运行ROS!
如何低成本搭建ARM+ROS的硬件载体?上文展示ROS部署前的筹备工作及步骤分解,本文将为大家演示ROS的移植及测试方法。

ROS中的序列化实现
理解了序列化,再回到ROS。我们发现,ROS没有采用第三方的序列化工具,而是选择自己实现,代码在roscpp_core项目下的roscpp_serialization中,见下图。这个功能涉及的代码量
ROS中XMLRPC是什么
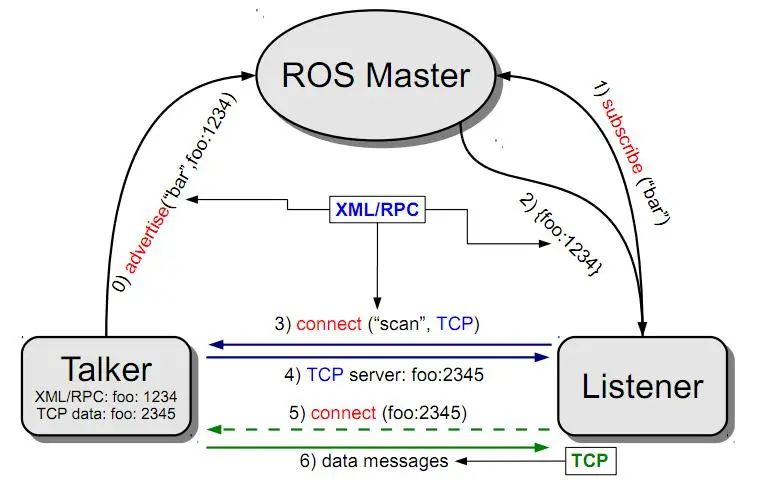
XMLRPC是什么? 关于ROS节点建立连接的技术细节,官方文档说的非常简单,在这里ROS Technical Overview。没有基础的同学看这个介绍必然还是不懂。 在ROS中,节
节点是如何调用XMLRPC的
节点间通过XMLRPC建立连接 在一个节点刚启动的时候,它并不知道其它节点的存在,更不知道它们在交谈什么,当然也就谈不上通信。 所以,它要先与master对话查询其它节点的状态,然后再与其它节点通信
ROS核心框架介绍
ROS核心框架 对于第一个问题,我也没仔细研究过源码,核心代码基本由python和C++组成,运用了xmlrpc机制,每个运行的节点可以理解成一个进程。进程间通讯有些是共享内存的方式(比如

ros的基本概念是什么
基本概念: ROS是一个用于在不同进程间匿名的发布、订阅、传递信息的中间件。 ROS2系统的核心部分是ROS网络(ROS Graph)。 ROS



评论