 4312A/B伺服电机闭环控制器
4312A/B伺服电机闭环控制器

概述
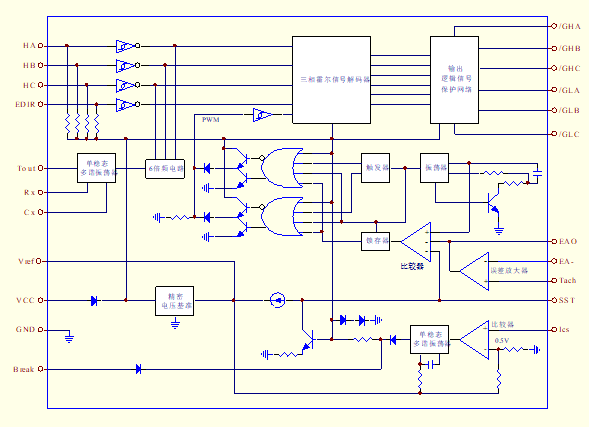
4312A/B伺服电机闭环控制器是符合GJB2438标准的厚膜全硬件三相无刷电机调理器。内部由三相霍尔解码器、速度反馈环、双单稳多谐振荡器、PWM控制器,电流门限比较器、低温漂高精度电压基准等部分组成。
原理是三相无刷电机霍尔信号六倍频后定脉宽给PWM控制器中的误差放大器完成转速反馈,电流门限比较器输出的信号定脉宽给PWM控制器使PWM信号关断来完成电流反馈,根据三相无刷电机被控制可能的转速变化范围和扭距变化范围,外部调节PID参数,来完成在给定转速设置时稳定转速目标。
使用时必须级联类似于4306、4301等三相全桥驱动器,实现闭环驱动三相无刷电机的目的。同时具有故障控制、方向控制、霍尔信号脉冲整形、电源接反保护、输入/输出浪涌保护的功能。4312A/B伺服电机闭环控制器级联4306/4301三相全桥驱动器适用于100V以下的伺服电机闭环控制。
主要特点
1.全硬件结构,避免了用DSP+CPLD模式实现时,上电建立时间长的缺点;
2.模拟PID环路没有了DSP数字PID环路的量化噪声,超调量更容易设置;
3.内置高精度基准温漂小于50ppm/℃,有利于外部进行模拟高稳定转速设定;
4.依靠三相无刷电机的三相霍尔换向信号就能给定完成转速反馈,无需外加转速测量装置;
5.HJ4312A/B可适用于多款三相桥功率驱动器直接接口;
6.内控指标符合GJB2438B或MIL-PRF-38534质量控制要求,老炼筛选依据GJB548条件进行;
7.低功耗及多重保护有利于提高器件的使用寿命/可靠性;
8.完全国产化。
电原理图
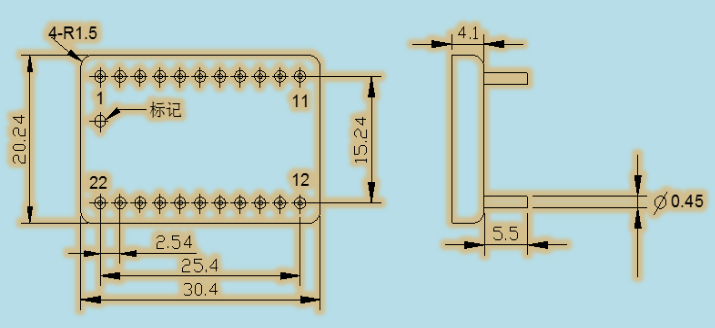
封装形式及引出端功能
1.采用BOX3020-22线金属全气密封装,封装尺寸如图所示。
2.引出端功能

注;上表为HJ4312A的引脚定义,驱动器A、B、C相高低端逻辑电平均为低电平有效。HJ4312B较HJ4312A的引脚定义差别在于HJ4312B的驱动器A、B、C相高端逻辑电平为低电平有效、低端逻辑电平为高电平有效,其余引脚定义均一致。
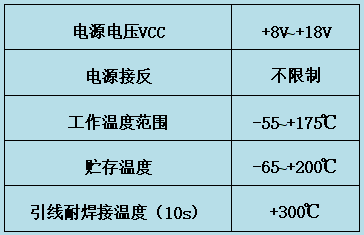
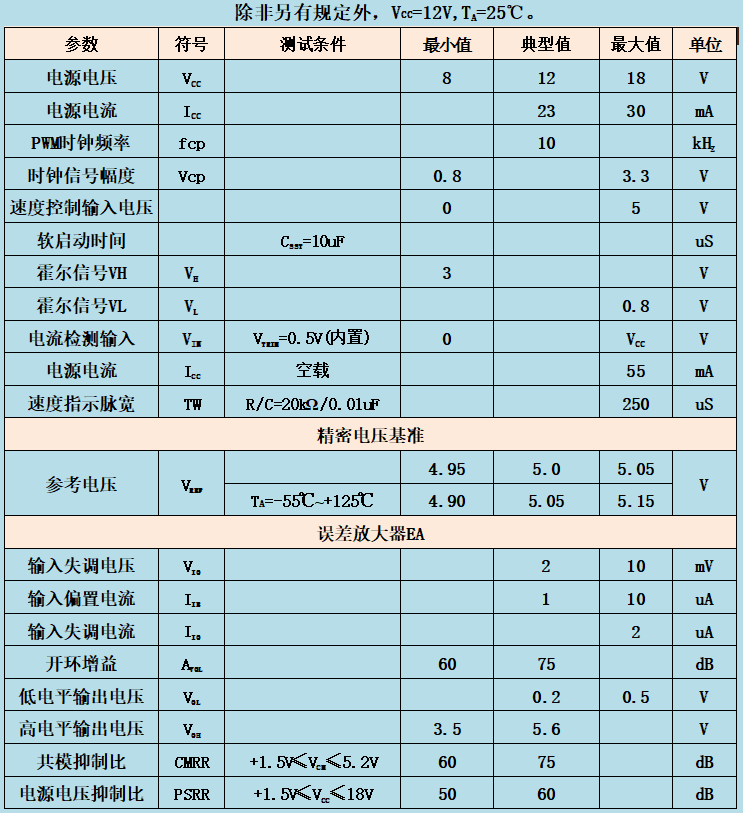
绝对最大额定值
电特性
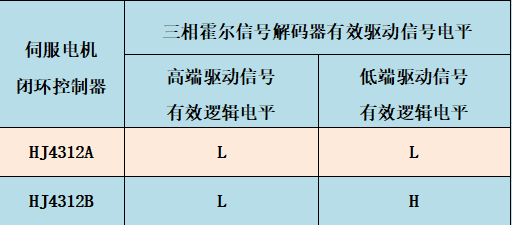
三相霍尔信号解码器真值表

HJ4312A/B伺服电机闭环控制器使用时必须级联类型于HJ4306、HJ4301这样的三相全桥驱动器,例如HJ4306三相全桥驱动器来说,高端和低端驱动信号均为低电平有效,需搭配HJ4312A才能使电机在上电后自启;而对HJ4301三相全桥驱动器来说,高端驱动信号低电平有效、和低端驱动信号高电平有效,需搭配HJ4312B才能使电机在上电后自启。
下表为HJ4312A/B伺服电机闭环控制器的三相霍尔信号解码器有效驱动信号逻辑电平真值表;
HJ4312A/B伺服电机闭环控制器级联类型于HJ4306、MSK4301这样的三相全桥驱动器使用时需根据三相全桥驱动器的高、低端驱动信号来匹配HJ4312A/B伺服电机闭环控制器,必要时需使用带施密特功能的反相器来完成换向,推荐使用HJ4069。
下表列举了HJ4312A/B伺服电机闭环控制器与部分三相全桥驱动器级联使用时驱动信号是否需要换向。

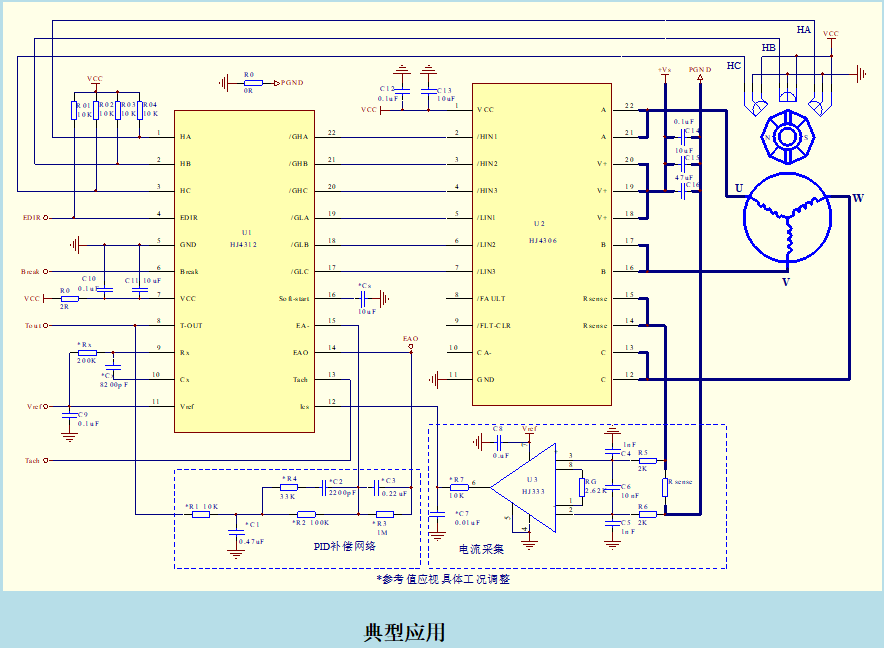
典型应用及注意事项
HJ4312A伺服电机闭环控制器级联HJ4306三相全桥驱动器应用电路。
1.转速反馈信号脉冲宽度
如果期望最大电机速度为3000RPM,并且所使用的电机转子上的永磁体具有一对磁极,则电机每次机械旋转一周将会使每个霍尔效应传感器传递一个脉冲周期,三个传感器将产生三个独立的脉冲周期,同时HJ4312A/B转速反馈信号端T-OUT将产生一个脉冲周期数为3的脉冲信号,每个脉冲分别对应传感器脉冲的上升沿和下降沿。电机每秒转速50转,转速反馈信号将每秒产生150脉冲或具有150赫兹的频率。因此,转速反馈信号脉冲周期为6.66毫秒,转速反馈信号脉冲宽度可设定为反馈信号脉冲周期的70%~80%,计算公式如下:
τ=0.5·Rx·Cx
注:0.5为单稳态震荡电路的时间常数。Rx为转速反馈信号脉宽设定电阻,Cx为转速反馈信号脉宽设定电容。
系统应用时,在转速固定的情况下,Rx和Cx使用同样的参数匹配不同的HJ4312A/B伺服电机闭环控制器模块,所设定的脉冲宽度因双稳态多谐振荡器而存在细微的差异,因此需对Rx和Cx进行微调,使其设定的脉冲宽度为定值,可有效避免双稳态多谐振荡器带来误差。
2.转速给定及PID补偿网络
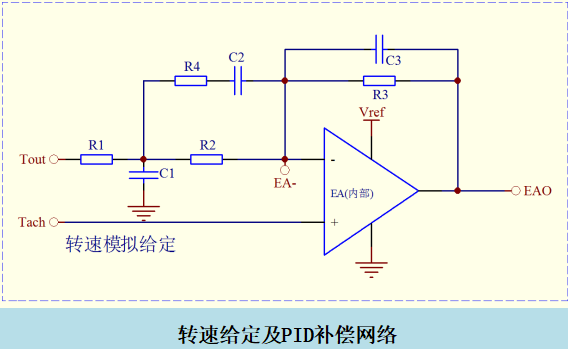
R1、C2的取值主要取决于Tout的最低频率,即三相无刷电机最低的转速;
R2、R3、R4、C2、C3组成了PID补偿网络,通过调节该补偿网络使电机在给定条件下,适应扭矩变化要求;
Tach转速给定即可模拟给定也可以通过DSP的DAC直接给定或DSP的PWM输出加低通滤波器给定。
3.电流采集
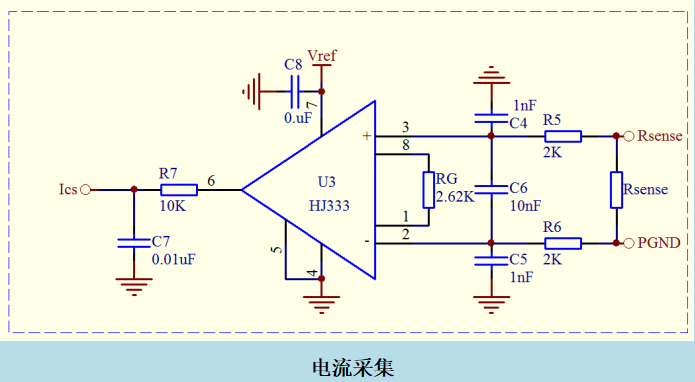
采样电阻Rsense应根据电机特性、+Vs、比较器门限电压和仪表运算放大器增益电阻RG共同决定,HJ4312A/B伺服电机闭环控制器内部预留的比较器门限电压为0.5V
4.电平兼容设计
若需要程控转向、刹车、PWM给定转速,为安全起见,建议用户要用类似HJ521C的光耦进行隔离。
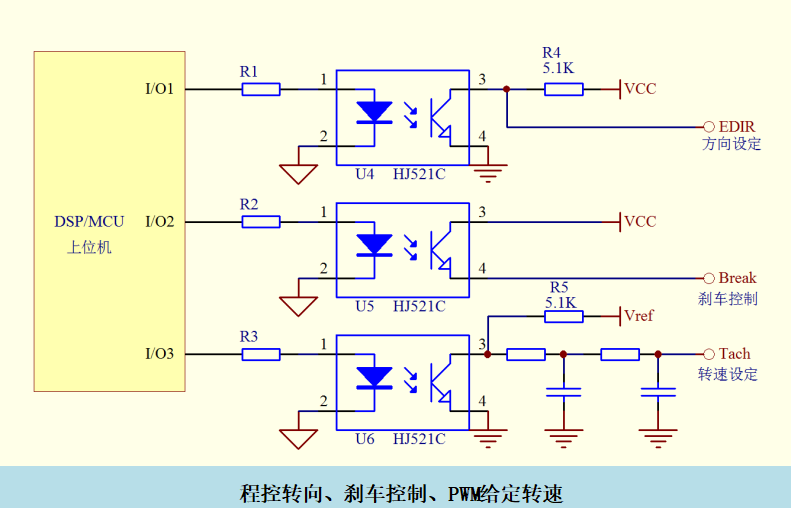
* R1、R2、R3应视DSP/MCU的外围供电确定、要保证发射二极管的导通电流≥6Ma。
相关产品推荐:
1.HJ4301/HJ4306集成栅驱动三相MOSFET桥脉冲驱动器
2.HJ4307而高温集成栅驱动三相MOSFET桥脉冲驱动器
3.HJ2183 600V半桥驱动器
4.HJ4236 600V三相全桥栅极驱动器
-
控制器
+关注
关注
114文章
17886浏览量
195228 -
伺服电机
+关注
关注
88文章
2202浏览量
61584
发布评论请先 登录
航晶微电子BLDC控制电路设计方案

基于MT6813的云台电机角度闭环控制系统设计与应用-艾毕胜电子
变频器+编码器如何做闭环控制?
云台伺服驱动板闭环控制参数解读与整定


闭环控制存在延时
基于MT6835磁编码器IC的步进电机全闭环伺服控制策略
自动控制系统中什么叫开环控制,半闭环控制,闭环控制?三者有何区别?
MT6835:高速磁编码技术赋能下一代伺服电机闭环控制
伺服与变频器的异同,详细解释





评论