 激光雷达导航机器人
激光雷达导航机器人

激光雷达导航是通过360度旋转雷达对周围10米以内平面空间进行扫描,并生成平面地图;根据雷达扫描出来的平面地图结合碰撞、沿墙等不同的传感器取得的数据来进行自主定位、导航、路径规划等SLAM算法。
特性
1)地图信息准确度高,定位范围广,定位快速且精度高.
2)地图可以在手机,平板等远程设备端准确实时显示.
3)具有可视化地图操控功能,可实时查看机器的运动轨迹,并进行地图虚拟墙等操作.
4)具有机器当前位置重定位功能,重复定位精度<0.5%,绝对定位精度<2%.
5)适应性强,适用于于各类地板,瓷砖类地面,都可以正常完成预定的运动.
6)兼备陀螺仪地图构建导航方案的全部特性.
7)基站回座一体化设计,基站与主机信息相互传输。
应用领域
室内机器人,比如清洁机器人,
运货机器人(AGV),服务机器人
无人机,比如巡逻,搜索,监视等无人机
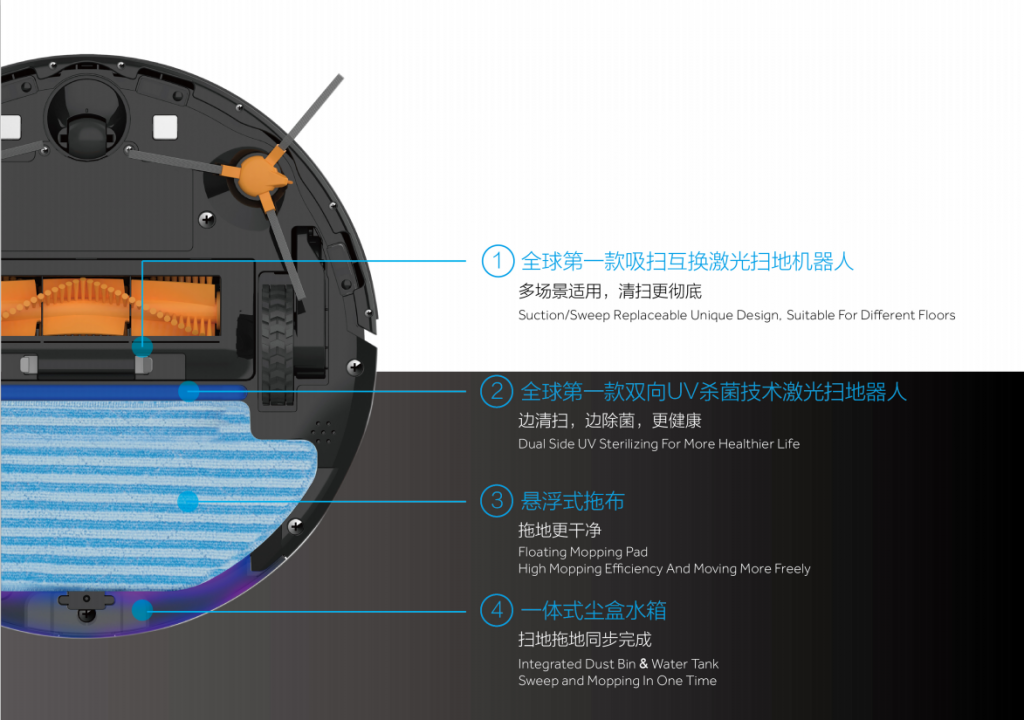
 激光导航扫地机
激光导航扫地机

声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
服务机器人
+关注
关注
9文章
595浏览量
54104 -
扫地机器人
+关注
关注
21文章
842浏览量
55447 -
智能扫地机器人
+关注
关注
0文章
33浏览量
6677
发布评论请先 登录
相关推荐
热点推荐
AI驱动的人形机器人,成为激光雷达产业的下一个爆发点
电子发烧友网报道(文/梁浩斌)过去两年,激光雷达跟随ADAS在电动汽车上大放异彩。作为视觉感知基础上的进阶感知硬件,激光雷达在机器人领域的应用,也开始随着人形机器人产业的爆发而再次受到

新华网:国产激光雷达爆单!销售额猛增近100%,订单排到年底
激光雷达是机器人的核心部件之一,通过它可以让机器人实现定位、导航、避障等功能,今年以来因为机器人市场需求旺盛,

德州仪器加速激光雷达在机器人中的应用
激光雷达技术正持续提升机器人与自主系统在各种环境中的感知、反应和安全运行水平。这项技术虽已有数十年历史,但近年来的发展才使激光雷达成功应用于机器人领域,例如图所示的自主移动

禾赛科技荣获中国割草机器人行业激光雷达引领者认证
2025 年 7 月,禾赛凭借深厚的技术积累、强劲的市场表现以及引领市场的商业价值,登顶高工机器人产业研究所《2025 上半年中国机器人 3D 激光雷达出货量排行榜》榜首,并荣获 CETA
AGV/AMR机器人单线激光雷达选型指南
随着机器人行业的飞速发展,各种场景机器人的广泛应用,激光雷达作为必不可少的传感仪器在帮助机器人实现对环境的感知方面,遇到障碍物时能灵活绕障碍,在整个

详细介绍机场智能指路机器人的工作原理
和周围环境变化。激光雷达和摄像头持续检测前方是否有障碍物,一旦发现障碍物,导航系统会立即调整路径,引导机器人避开障碍物,确保行走安全。同时,机器人会根据实时的人流情况,动态调整行走速度
发表于 05-10 18:26
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
、Gazebo仿真(含RGBD相机/激光雷达仿真)、实物机器人运动控制,实现\"仿真→实物\"的无缝衔接
高阶应用篇(7-9章)
聚焦视觉SLAM、自主导航等前沿场景,提供完整项目链路(如
发表于 04-27 11:24
LD Gen2 Lite激光雷达:赋予机器人 “感知力” 的关键
在机器人的感知世界里,激光雷达宛如一双敏锐的“慧眼”,赋予机器人“看”清周围环境、自主决策的能力。亮道智能最新推出的纯固态Flash短距激光雷达LD Gen2 Lite,凭借其独特的技
速腾聚创第100万台激光雷达下线,用于人形机器人
电子发烧友网综合报道 数日前,RoboSense 速腾聚创成功交付了其第 100 万台激光雷达,订单接收方为人形机器人(上海)有限公司。速腾聚创由此成为全球首家实现百万台高线数激光雷达下线的企业
发表于 03-16 01:00
•925次阅读
洛微科技助力机器人领域激光雷达技术升级
近日,由中国国际经济技术合作促进会标准化工作委员会牵头制定的《机器人用激光雷达通用技术条件》(T/CIET 879-2024)正式发布。
40个激光雷达!苹果布局机器人感知系统,让碰撞降低63.7%
苹果入局人形机器人, 先做感知系统 !还一次性用了 40个激光雷达 ! 关于苹果涉足人形机器人领域的传闻早已甚嚣尘上。近日,该公司确实有新动作——研发了一套名为 ARMOR 的新型以自我为中心

禾赛拒绝“激光雷达无用论”
1440线激光雷达AT1440和车规级纯固态激光雷达FTX以及面向机器人的JT系列。 李一帆指出,目前行业对机器人的定义尚无共识,但激光雷达

禾赛科技推出面向机器人领域的迷你3D激光雷达
近日,在拉斯维加斯举行的 CES 2025 国际消费电子展上,禾赛面向机器人领域的迷你 3D 激光雷达 JT 系列产品正式面向全球发布。全新产品迷你型 3D 激光雷达 JT 系列发布即交付,已向客户交付超过 2 万颗。
禾赛科技激光雷达交付量突破十万台大关
尤为亮眼,特别是在机器人市场领域。据悉,禾赛科技面向机器人市场的单月激光雷达交付量超过了20,000台,这一数字覆盖了移动机器人、配送机器人
禾赛科技12月激光雷达交付量突破10万台
禾赛科技 12 月激光雷达交付量突破 100,000 台,成为全球首个达成单月交付量超过 10 万台的激光雷达企业。值得一提的是,禾赛面向机器人市场单月交付激光雷达超过 20,000





 工商网监
工商网监
评论