 多样化图像传感器组合对于智能工厂机器人有多重要?
多样化图像传感器组合对于智能工厂机器人有多重要?

点击蓝字关注我们
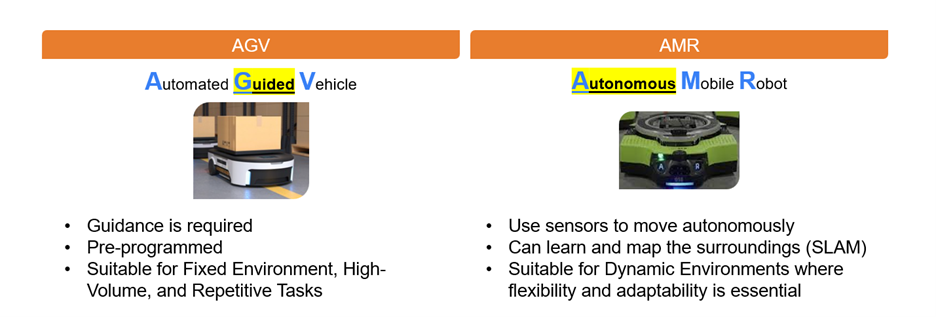
图像传感器一直是机器和机器人在工厂和仓库中识别物体的关键,能够利用“所看到的”来了解所处的环境,这提高了图像传感器的性能标准。需要知道的是,没有任何一个传感器解决方案能适用于所有应用。因此,可能需要结合使用不同的图像传感器。在本文中,您将了解设计多功能自主移动机器人(AMR) 或固定机器人所需的各种图像传感器的关键性能指标。01用于导航和防碰撞的全局快门传感器
手机中的传感器使用“卷帘快门”来进行图像检测,逐行顺序曝光。但在这种方法中,传感器中每行像素的曝光之间略有延迟,导致检测到的图像中出现“伪影”(视觉异常),AMR 在车间穿行时所经历的角运动和振动会放大这种影响。安森美(onsemi)开发了采用“全局快门”的先进图像传感器,可以同时曝光所有像素,以降低图像中出现伪影的可能性。这使 AMR 的导航变得更加容易,降低了与其他物体碰撞的可能性。全局快门图像传感器的关键指标包括:
-
全局快门效率(GSE) 量化像素对杂散光污染的灵敏度。GSE 高的传感器不太可能生成有污点、光斑或伪影的图像。
- 模块化传输频率(MFT) 对于图像清晰度至关重要。这在必须能够读取条形码的机器人或机器中很重要。此外,检测边缘的能力是机器使用 AI 了解其环境的基本要求,MFT 高的图像传感器能够实现这一点。
具有嵌入式高动态范围的安森美 AR0822 示例
03用于测距应用和精确物体放置的高分辨率大画幅图像传感器 固定机器人有时需要读取包含物体摆放位置信息的标签。传感器和标签之间的距离可能因应用而异,因此需要能够生成大画幅图像的高分辨率传感器。安森美的高分辨率传感器从 8 MP 到 45 MP 不等,非常适合这种用途,使机器人能够读取标签并准确地将物体放置在预定的目的地。 04安森美将传感器专有技术与开发工具相结合 AMR 和固定机器人在智能工厂中执行各种任务,因此要选择针对特定自动化任务进行优化的图像传感器。无论是导航和条形码读取所需的全局快门传感器、远距离和精确物体放置所需的高分辨率传感器,还是在非确定性混合照明环境中成像的 HDR 传感器,安森美提供的图像传感器都能为 AMR 和固定机器人提供适合其应用的视觉水平。 ~扫码为安森美投票吧~ AR0822已入选“亚洲金选奖(EE Awards Asia)”传感器产品奖项评选,快来扫码为安森美投票吧~
点个星标,茫茫人海也能一眼看到我


原文标题:多样化图像传感器组合对于智能工厂机器人有多重要?
文章出处:【微信公众号:安森美】欢迎添加关注!文章转载请注明出处。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
安森美
+关注
关注
33文章
2153浏览量
95819
原文标题:多样化图像传感器组合对于智能工厂机器人有多重要?
文章出处:【微信号:onsemi-china,微信公众号:安森美】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
。有了扭矩传感器,机器人能实时检测力的大小和方向,自动调整姿态。例如,在人形机器人的腿部关节,传感器以1千赫兹的频率感知地面反作用力,瞬间调
发表于 04-17 17:27
为何你的机器人手臂“知觉”存在偏差?探秘力传感器的奥秘
假如你操作过机械臂,或者在工厂里调试过用于精密装配、抛光的机器人,一定碰到过这种怪事:明明让机械臂空载停在空中,周围啥也没碰,可力传感器上的读数却显示有好几牛顿的力,甚至还带着不小的扭
发表于 04-13 15:25
安森美传感器芯片创新突破机器人感知边界
随着机器人技术从工业自动化向服务、医疗、特种作业等多领域深度渗透,传感器作为机器人的“感知器官”,其性能直接决定了机器人的环境认知、精准控制
机器人内部零配件的生产加工厂从哪找?
机器人内部零配件生产厂家哪里找?东莞力存科技为您揭秘数控车床加工的关键要素
随着机器人文化在中国的快速普及,机器人市场呈现出爆发式增长态势。据最新市场数据显示,2025 年全球智能
发表于 12-09 18:22
人形机器人传感器产业链最新分析:力、触觉、IMU、视觉传感器为主流!(全面)
环境的视觉、触觉、力觉,到维持自身平衡与定位的惯性测量等,各类传感器的性能与技术进步直接决定了人形机器人的智能化水平与应用场景拓展能力。当前,人形机器人

机器人领域中的温度传感器技术及其应用:机器人温度监测,提升机器人工作稳定性
随着机器人技术的发展,机器人在工业制造、物流管理、医疗护理等领域得到了广泛的应用,而 机器人的温度控制与监测 则是机器人操作和维护的重要

iTOF技术,多样化的3D视觉应用
视觉传感器对于机器信息获取至关重要,正在从二维(2D)发展到三维(3D),在某些方面模仿并超越人类的视觉能力,从而推动创新应用。3D 视觉解决方案大致分为立体视觉、结构光和飞行时间 (
发表于 09-05 07:24
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
机器人获得更接近人类的触觉反馈。
赛事首席技术官王博士表示:“当机器人开始‘感知’而非‘计算’环境时,真正的智能化竞技时代才算到来。” 未来,磁传感器技术的持续进化,必将不断改写人形
发表于 08-26 10:02
详细介绍机场智能指路机器人的工作原理
机场智能指路机器人主要依靠感知系统、定位系统、导航系统、智能交互系统和运动系统协同工作,来实现为旅客准确指路和提供服务的功能,以下是其详细工作原理:
感知系统
传感器类型 :
发表于 05-10 18:26
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
的有效途径。
结语
本书第7章和第8章内容系统性强,从基础理论到代码实践,为读者提供了机器人视觉与SLAM的完整知识框架。未来,我计划结合书中案例,进一步探索多传感器融合、自主导航等高级应用,争取在机器人感知领域
发表于 05-03 19:41
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
ROS的全称:Robot Operating System 机器人操作系统
ROS的 目的 :ROS支持通用库,是通信总线,协调多个传感器
为了解决机器人里各厂商模块不通用的问题,让机器人
发表于 04-30 01:05
【「# ROS 2智能机器人开发实践」阅读体验】+ROS2应用案例
的知识,还需要对ROS 2的节点通信和数据处理有一定的了解。通过实践这一部分内容,我掌握了如何在ROS 2中实现二维码识别,这对于提高机器人的智能性和交互性具有
发表于 04-27 11:42
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
地图构建→路径规划→动态避障)等等
2. 机器人功能开发
相较于ROS入门21讲,书中更是详细书写了关于机器人的功能开发,并且十分完善,教程详尽
传感器数据处理:机器人通常配备多种
发表于 04-27 11:24



评论