 西门子200smartPLC读取绝对值编码器的数据
西门子200smartPLC读取绝对值编码器的数据

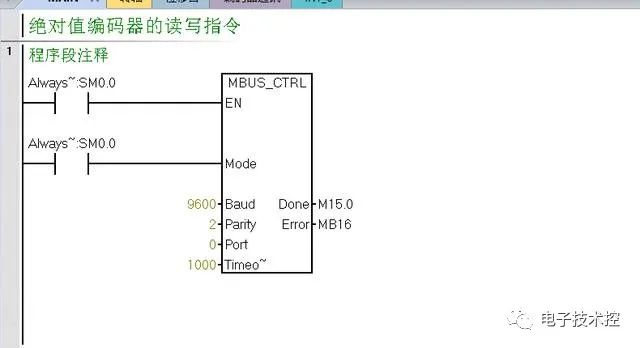
1.初始化
BAUD:波特率
Parity:校验类型,这里选择的是,偶校验。0为无校验,1为奇校验,2为偶校验。
Port:通讯端口号,这里使用的是0端口,也就是CPU上的DB9针孔
Timeout:超时时间
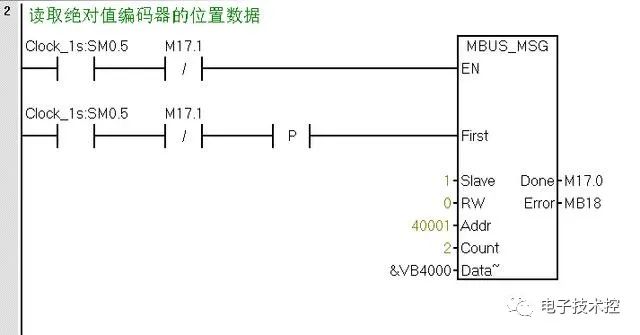
2.读取绝对值编码器的位置数据
Sm0.5:每1秒接通0.5秒,也就是每1秒执行一次指令
Slave:从站地址
RW:0读取,1写入
Addr:编码器储存位置数据的存储器起始地址
Count:需要读取的存储器的数量
DATA:读取的位置值存放进VB4000开始的存储器内。
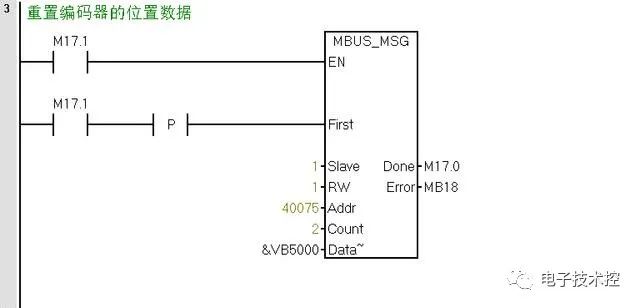
3.重新设置编码器的位置数据
比如将当前位置设置为0。可以在vb5000里面写进0,然后执行一次这个指令即可。
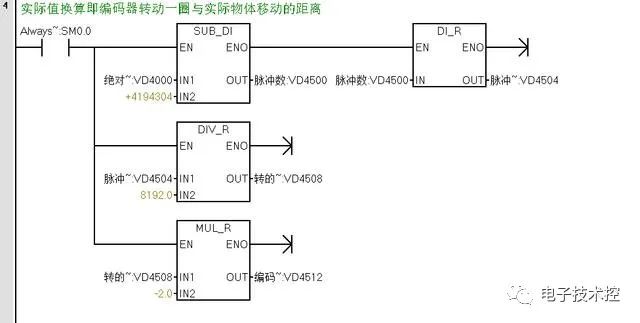
4.计算实际体的位移值,比如说编码器转动一圈会产生一个脉冲数的变化,根据这个脉冲数的变化与实际的位移进行一个换算,这样可以将物体实际产生的位移在PLC内部计算出来。大家可以看下这个实例的的功能。看看能不能推出来,编码器转动一圈的脉冲数和实际的位移。
注意事项:
编码器不同,内部的数据村存储地址也不同,在读写编码器的内部地址时需要确定对应的地址是否正确。
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
编码器
+关注
关注
45文章
4011浏览量
143368 -
plc
+关注
关注
5052文章
14812浏览量
488617 -
存储器
+关注
关注
39文章
7757浏览量
172208 -
cpu
+关注
关注
68文章
11331浏览量
225904 -
西门子
+关注
关注
98文章
3375浏览量
120721
原文标题:西门子200smartPLC读取绝对值编码器的数据
文章出处:【微信号:电子技术控,微信公众号:电子技术控】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
S7-200读取伺服电机的编码器数值介绍
位置控制、速度控制和扭矩控制。目前1FL6电机有两种编码器类型,即增量编码器类型及绝对值编码器类型。西门子的小型自动化S7-
发表于 09-29 16:15
•29次下载

绝对值编码器选型原则
根据设备和电路的要求选好绝对值编码器的类型和规格后,还要根据电路的要求合理选择绝对值编码器的电参数,包括额定功率、标称阻值、允许偏差、分辨率、最高工作电压、动噪声等。
什么是绝对值编码器?
什么是绝对值编码器?绝对值编码器装置在多圈旋转后仍然能提供绝对位置,不用时归零。多回转装置包括内部传动装置,这是给用户提供最好的解决方案。主
西门子200smartPLC定时器的用法
定时器是学习PLC必须要掌握的一个指令,咱们以西门子200smartPLC学习下定时器的用法,不同厂家的PLC指令各有不同,但大同小异,掌握其中一个,其他的都能很快掌握。

西门子S7-1200与编码器的连接、编程实例
由于S7-1200的经济性,与绝对值编码器的连接首选较为经济和方便的4—20mA信号接口,西门子S7-1200加SM1231模拟量模块,可直接连接2个带有4—20mA输出接口的绝对值

26位多圈绝对值编码器是什么?
26位多圈绝对值编码器是什么?26位多圈绝对值编码器是一种用于测量旋转角度的装置,它可以提供高精度的角度测量结果,而且具有较高的可靠性和稳定性。下面我们就介绍26位多圈

绝对值编码器结构及工作原理 绝对值编码器的信号输出及应用
绝对值编码器是一种常用的位置反馈传感器,广泛应用于各种电机控制系统。绝对值编码器还可用于检测电机的转速和方向。

绝对值编码器是什么?有哪些特点呢
在工业自动化领域,编码器是一种不可缺少的测量设备。而绝对值编码器作为其中的佼佼者,以其独特的性能和优势,在众多应用场景中发挥着重要作用。今天,就让我们一起来深入了解绝对值
绝对值编码器选型流程 5步锁定最优型号
绝对值编码器选型流程 5步锁定最优型号!绝对值编码器明确匹配电气接口与协议
1、总线兼容性:西门子 PLC 优先选 PROFINET 接口(




评论