 如何微控制器上新建MicroROS节点
如何微控制器上新建MicroROS节点

你好,我是爱吃鱼香ROS的小鱼。上一节我们介绍了MicroROS和Agent的安装,本节我们开始正式编写代码,接入ROS2。
硬件开发平台
为方便学习,本教程配套的硬件是小鱼自制的MicroROS学习板,同时该板可以作为下一章节搭建实体移动机器人的主控板以及后续制作机械臂的驱动板使用。
板载资源图如下:

该主控板可以在小鱼的店铺直接购买,性价比接地气,点击左下角阅读原文直达鱼香小铺。
一、新建工程添加依赖
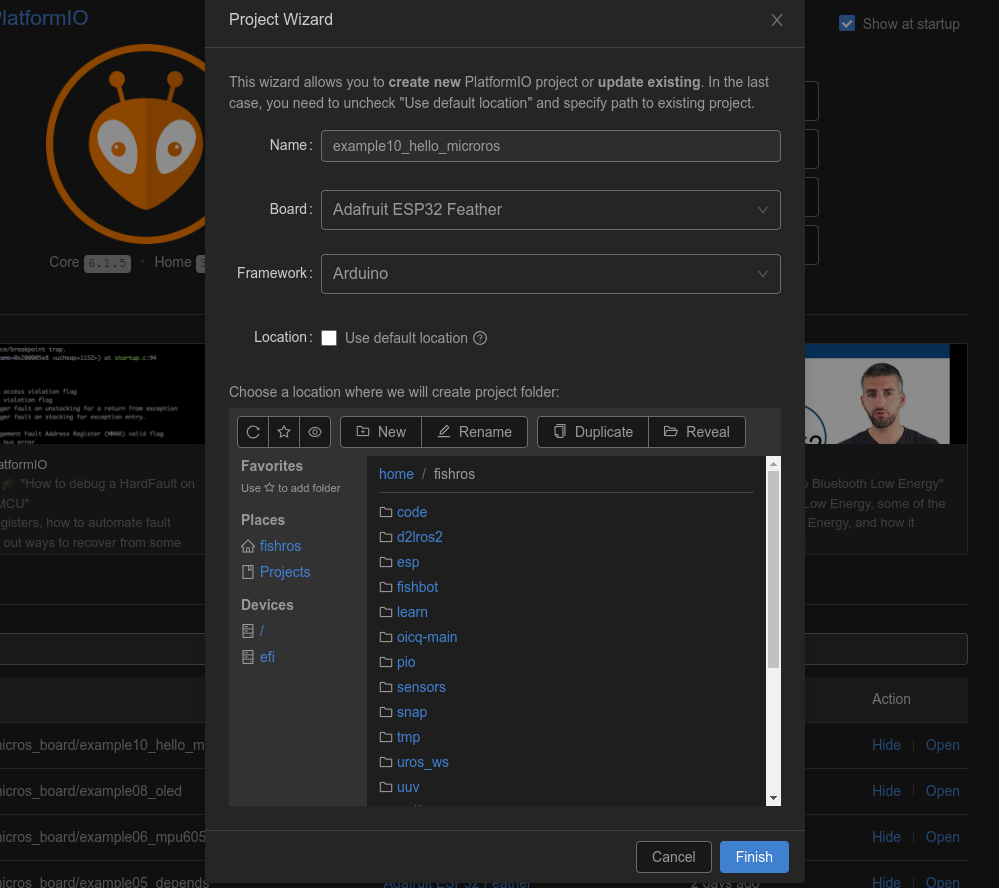
1.1 新建工程
新建example10_hello_microros工程,这里需要更改下工程的位置,默认目录是在文档目录下,小鱼在测试时发现目录定位上有bug,所以建议直接放到主目录或其下目录,小鱼这里直接放到主目录。
1.2 添加依赖
打开platform.ini,接着我们添加MicroROS的依赖。
[env:featheresp32]
platform = espressif32
board = featheresp32
framework = arduino
lib_deps =
https://gitee.com/ohhuo/micro_ros_platformio.git
这里使用的地址并不是MicroROS官方仓库,而是小鱼经过修改后的国内仓库地址,里面放置了小鱼编译好后可以直接使用的microros静态库,并对仓库中需要梯子的地址进行了替换。
二、编写代码-第一个节点
开始编写代码,因为Micro-ROS遵循RCLC-API,所以这里小鱼通过一个最简单的例程介绍如何新建一个节点。
#include < Arduino.h >
#include < micro_ros_platformio.h >
#include < rcl/rcl.h >
#include < rclc/rclc.h >
#include < rclc/executor.h >
rclc_executor_t executor;
rclc_support_t support;
rcl_allocator_t allocator;
rcl_node_t node;
void setup()
{
Serial.begin(115200);
// 设置通过串口进行MicroROS通信
set_microros_serial_transports(Serial);
// 延时一段时间,等待设置完成
delay(2000);
// 初始化内存分配器
allocator = rcl_get_default_allocator();
// 创建初始化选项
rclc_support_init(&support, 0, NULL, &allocator);
// 创建节点 hello_microros
rclc_node_init_default(&node, "hello_microros", "", &support);
// 创建执行器
rclc_executor_init(&executor, &support.context, 1, &allocator);
}
void loop()
{
delay(100);
// 循环处理数据
rclc_executor_spin_some(&executor, RCL_MS_TO_NS(100));
}
上面代码并不复杂,小鱼已经将注释写上,强烈建议你跟着代码敲一遍,不要直接复制粘贴。
相比在上位机中开发ROS,这里多了几步
设置通信协议,因为可以通过多种方式连接,所以需要进行提前设置
初始化内存分配器,在微控制器上资源受限,内存的管理要很细致
创建初始化选项,用于初始化rcl并创建一些需要用到的数据结构体
关于rclc的api小鱼并没有找到文档,不过源码的头文件依然非常清晰,直接按着Ctrl点击某个函数即可跳转(不行的,重启下Vscode)。
比如关于rclc_support_init 的源码及参数介绍。
/**
* Initializes rcl and creates some support data structures.
* Initializes clock as RCL_STEADY_TIME.
* * < hr >
* Attribute | Adherence
* ------------------ | -------------
* Allocates Memory | Yes (in RCL)
* Thread-Safe | No
* Uses Atomics | No
* Lock-Free | Yes
*
* param[inout] support a zero-initialized rclc_support_t
* param[in] argc number of args of main
* param[in] argv array of arguments of main
* param[in] allocator allocator for allocating memory
* return `RCL_RET_OK` if RCL was initialized successfully
* return `RCL_RET_INVALID_ARGUMENT` if any null pointer as argument
* return `RCL_RET_ERROR` in case of failure
*/
RCLC_PUBLIC
rcl_ret_t
rclc_support_init(
rclc_support_t * support,
int argc,
char const * const * argv,
rcl_allocator_t * allocator);
三、运行测试
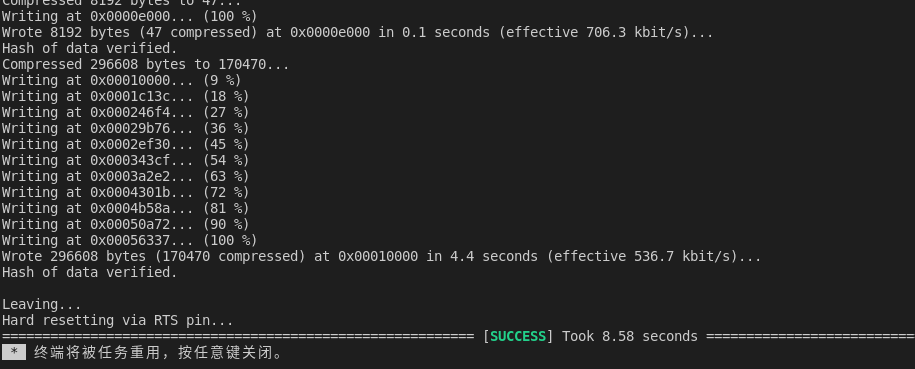
连接开发板,编译下载,如果遇到端口被占用,多半是你的microros_agent没有关闭,Ctrl+C打断运行再次尝试。
接着打开Agent
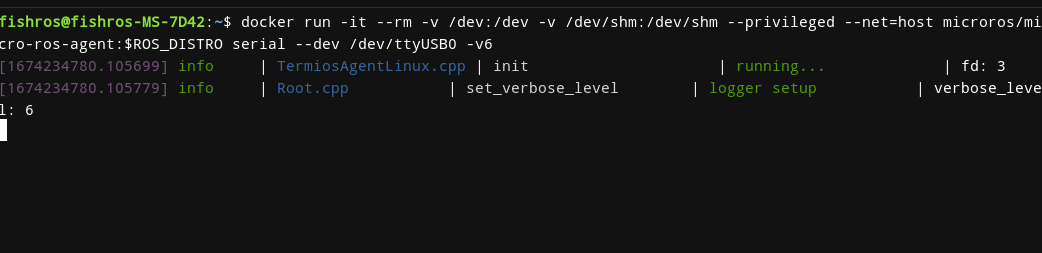
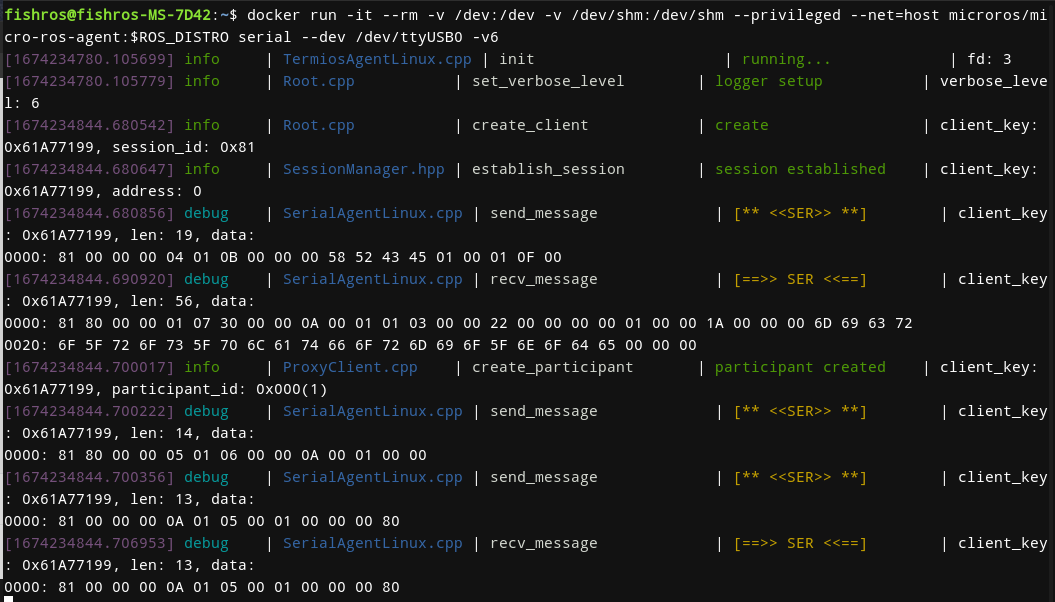
然而并没有什么反应,重新点击一次RST即可看到有数据发送和接收过来了。
接着打开新的终端,输入指令
ros2 node list
ros2 node info /hello_microros
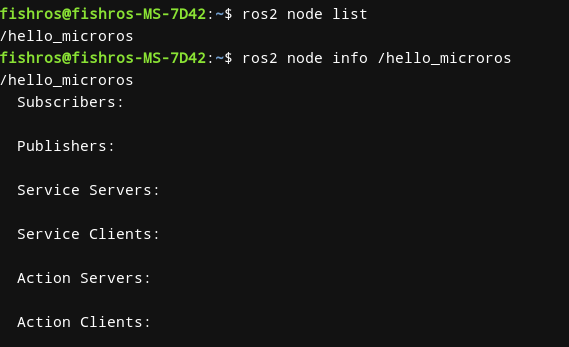
可以看到,我们的第一个节点成功运行起来了。
四、总结
本节我们成功的在微控制器平台上将MicroROS节点运行起来了,下一节我们开始正式进行ROS2通信的学习。
-
微控制器
+关注
关注
49文章
8890浏览量
165868 -
Micro
+关注
关注
2文章
274浏览量
36773 -
学习板
+关注
关注
0文章
47浏览量
12664 -
机械臂
+关注
关注
14文章
601浏览量
26191 -
ROS
+关注
关注
1文章
296浏览量
18885
发布评论请先 登录








评论