 交通流模型分类及微观建模
交通流模型分类及微观建模

近年来,交通仿真越来越受到人们关注,原因在于它在各类场景方面的应用变得越来越广泛。交通仿真不仅可以用于交通规划设计领域,帮助设计人员改善路网与交通管理效率,并且还能辅助构建虚拟城市场景、生成自动驾驶车辆测试场景的动态交通环境。在以上应用场景中,仿真车辆的运动表现是否真实对仿真结果有重要影响,而交通流模型可以说是影响车辆运动表现最重要的因素。
文章剩余内容为两部分,先介绍了交通流模型的种类,然后讨论了微观交通流模型的建模方法。交通流模型分类
交通流是车辆群体在道路上行驶时的交通状态[1],在一定的道路环境下,交通流会随着时间的变化而变化,能揭示这种变化规律的就是交通流模型。简单来说,交通流模型要解决的问题就是,给定一个道路网络、交通流和初始状态,交通将如何演变? 交通流模型的构建涉及很多数学描述,依据构建方法的不同,大体可以分为三类,分别是微观模型、宏观模型和介观模型(中观模型),各模型的特点如下: 1.宏观交通流模型:以整个交通流作为研究对象,用流体力学的方法对交通流进行建模,从整体层面对交通流进行分析和预测,着重表现道路网络的总体运行状态和特征,而忽略个体车辆的行为,宏观交通流的经典模型是LWR模型和连续二阶交通流PW模型。该类模型对计算机资源要求较低,仿真速度较快,比较适合对大规模路网进行交通仿真。 2.微观交通流模型:以个体车辆和驾驶员行为作为研究对象,从运动学角度对车辆的加速度、转向和制动行为进行建模,着重考虑个体车辆之间的相互影响和交互,能够较为精准的描述车辆在道路上的跟驰、换道、超车等行为,并且能够提供直观的交通流动画演示。该类模型对计算机的资源要求较高,仿真速度慢,一般用来研究交通流与局部道路设施的相互影响。不过当采用并行处理技术时,微观模型也可用于大型路网的交通仿真[2]。3.中观交通流模型:该类模型介于宏观和微观之间,以若干车辆构成的车队作为研究对象,描述车队在路段和节点的流入流出行为,对车辆的车道变换之类的行为也能用简单的方法近似描述。该类模型可用来评价较大范围的交通流,但由于模型中的变量太多,难以实时求解,在应用上会受到一定限制。 4.混合交通流模型:该类模型综合了宏观模型和微观模型的优点,既能够考虑整个道路网络的运行状态,又能够分析每一辆车的行驶轨迹,比如Sewall等人[3]使用基于代理(agent)的模型来模拟感兴趣区域的交通,而其余区域使用连续体模型,通过在两种建模方法之间动态和自动切换,进而可以根据用户偏好来模拟不同详细级别下的交通。
黄框范围使用微观agent,其他范围使用宏观flow
微观交通流模型在城市交通仿真和自动驾驶仿真测试中应用较多,下面将着重介绍微观交通流模型的构建方法。微观交通流建模
按照构建方法的不同,微观交通流建模大致可以划分为传统交通流建模和现代交通流建模两种类型[4]。
传统交通流建模
传统交通流建模是基于各种物理学原理(主要是运动学),使用微分方程、偏微分方程等数学工具来描述道路上车辆的跟驰、换道等行为。其明显特点是交通流模型的限制条件比较苛刻, 模型推导过程比较严谨, 模型物理意义明确。该方法在交通流理论体系中仍居主导地位, 并且在应用中方法相对成熟,主要包括跟驰模型、元胞自动机模型两大类。在元胞自动机模型中,道路被离散化为单元(或称元胞),每个单元代表道路上的一个区域,模型决定车辆何时从当前单元移动到下一个单元。由于其简单性,元胞自动机模型计算效率高,可以模拟大型路网上的大量车辆。然而由于其离散性,因此只能再现有限数量的真实交通行为。
而跟驰模型则是运用动力学方法,探究车辆在无法超车的单一车道上队列行驶时,车辆跟驰状态的变化。通过求解连续时间的微分方程,不仅可以得到任意时刻车队中各辆车的速度、加速度和位置等参数,进而描述交通流的微观特性,还可以通过进一步推导,得到平均速度、密度、流率等参数,描述交通流的宏观特性。鉴于跟驰模型可以生成更加真实的驾驶行为,下面将着重对跟驰模型进行介绍。
先简单的理解下跟驰模型,假设你正驾车行驶在道路上,你正前方车道有另一辆车,且你大概能够预估出前车的速度和与前车之间的距离,那么下一刻你到底是该加油门呢还是踩刹车还是保持当前油门不变呢?到这里我们肯定会想,如果距离很近,且前车速度比我们小,肯定要刹车了;如果距离很远,且前车速度比我们大,一般是要加速的。跟驰模型干的就是这个事儿,依据当前车辆与前方车辆的速度差和距离,输出当前车辆的加速度或者速度。以此为目的,自20世纪50年代以来,国内外的学者对车辆跟驰模型进行了大量、系统的研究,形成了以刺激-反应模型、安全距离模型、生理-心理模型为主的三类模型。
(1)刺激-反应模型
刺激-反应模型的一个代表模型是GM(General Motor)模型,该模型假设车辆在22.86m以内未超车或变换车道的情况下,由驾驶动力学模型推导而来,并引入反应=灵敏度×刺激的观念,其中反应用后车的加速度表示,刺激用后车与前车的相对速度表示。其一般表达式为:
式中,——时刻第辆车的加速度;——时刻第辆车与第辆车之间的速度差;
——时刻第辆车与第辆车之间的距离;
——常数。
这个模型的基本假设为:驾驶员的加速度与两车之间的速度差成正比,与两车的车头间距成反比,同时与自身的速度也存在直接的关系。当跟车驾驶员感知到车头间距及相对速度差异过大时,会加速接近前车以缩短车头间距,逐渐由不受影响状态进入受影响状态;当跟车驾驶员感知到过于接近前车而不安全时,则减速以加大车头间距;减速后的车头间距若不合乎跟车驾驶者的期望则再加速,整个系统就在车辆不断加减速的自我调整过程中达到稳定跟驶状态。
GM模型形式简单,物理意义明确,作为早期的研究成果,具有开创意义,许多后期的车辆跟驰模型研究都源于刺激-反应基本方程。但是GM模型的通用性较差,现在较少使用GM模型。
(2)安全距离模型
安全距离模型也称防撞模型,该模型最基本的关系并非GM模型所倡导的刺激-反应关系,而是寻找一个特定的跟车距离(通过经典牛顿运动定律推导出)。如果前车驾驶员做了一个后车驾驶员意想不到的动作,当后车与前车之间的跟车距离小于某个特定的跟车距离时,就有可能发生碰撞。安全距离最初的模型如下:
式中,——参数。
安全距离模型在计算机仿真中有着广泛应用,主原因是其标定比较简单,大多数情况只需知道驾驶员将采用的最大制动减速度,就能满足整个模型的需要。但该模型仍有许多问题需要解决,例如,避免碰撞的假设在模型的建立中是合乎情理的,但与实际情况存在着差距;在实际的交通运行中,驾驶员在很多情况下并没有保持安全距离行驶。
(3)生理-心理模型
生理-心理模型也称反应点模型(Action Point Models)简称AP模型。该模型用一系列阈值和期望距离体现人的感觉和反应,这些界限值划定了不同的值域,在不同的值域,后车与前车存在不同的影响关系。该类模型的代表模型就是Wiedeman建立的MISSION模型。该模型根据前后车距离与速度差的不同值,将后车的状态划分为跟驰行驶、制动避祸、逼近前车、自由行驶、脱离前车五种状态。然后后车再依据不同状态的加速度计算公式,计算加速度。
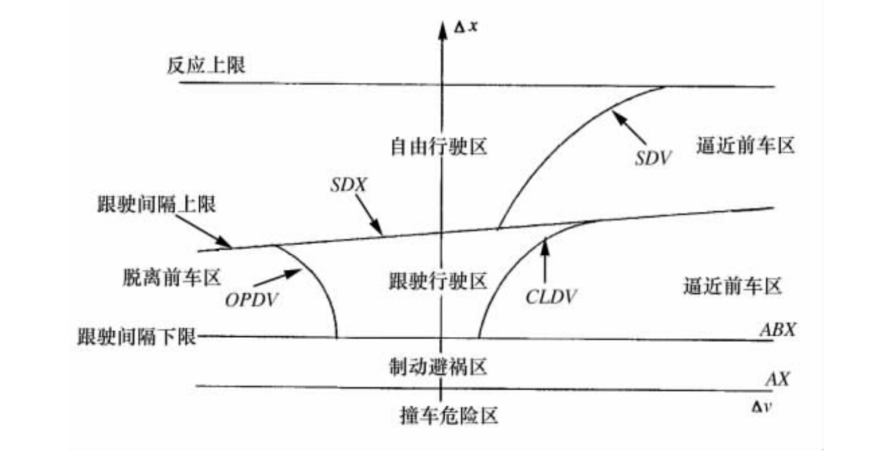 Wiedeman跟驰模型的状态分区
Wiedeman跟驰模型的状态分区
生理-心理跟驰模型对车辆跟驰行为的刻画比较准确,因而在如今的微观交通仿真软件中应用广泛,我们常见的VISSIM、PARAMICS、TransModeler软件都采用了心理-生理跟驰模型。该类模型的缺点在于模型的参数较多,子模型之间的相互关系比较复杂,并且对于各种阈值的调查观测比较困难,使用之前需要进行大量的标定工作。
(4)换道模型 以上内容大致解释了跟驰模型的原理和常见的类型,但仅靠跟驰模型是不够的,现实中车辆还存在超车、换道的行为,为合理描述这种行为,学者们对换道模型进行了大量研究。与车辆跟驶行为相比,换车道行为更加复杂,以至于难以用数学方法描述。换车道行为是驾驶员根据自身状态,针对周围车辆的车速、间隙等周边环境信息的刺激,调整并完成自身驾驶目标的综合过程。要描述这样复杂的驾驶行为,必须有大量的观测数据作为基础,这也是换车道模型相比于跟驶模型发展滞后的根本原因。从驾驶员的角度来看,换道行为大致可以分为以下三个阶段: 1.产生换道动机并确定目标车道 a.这个阶段中,某一时刻驾驶员在周围交通状况和自身行驶目标的刺激下,萌生了换道的念头,并初步确定了目标车道(可以是一条或多条)。换道动机的产生有两种类型,车辆需要驶入或者驶出交织区、匝道这种有明确目标车道的换道被称为强制换道,强制换道往往与车辆自身的路径规划有关;另一种则是车辆不满意当前的行驶状态而产生的没有固定目标车道的换道,这种换道被称为自由换道。自由换道确定目标车道的首要原则就是,行驶至目标车道后能够获得更好的行驶状态(更好的视野、更快的速度等)。 b.由于强制换道的目标车道往往已经确定,因此换道动机阶段的研究往往是针对自由换道展开的。从当前应用的模型来看,主要有PLC法和综合评价法两种方式。其中PLC是换道车道概率的意思,这种方法以驾驶满意度为评价指标,对于所有处于不满意状态的车辆,由概率分布的方式确定车辆的换道需求。这种方法的缺陷在于过度依赖标定数据,并且没有解释换道机理;综合评价法则是依据驾驶员实际需求的产生过程,如(前方是大货车、公交车就换道,前方车速小于期望车速20km/h时就换道),在模型的适用性方面更为可靠,但这种方法主观性太强,且数据不易获得,因而开展的研究较少。 2.判断能否换道 a.在确定目标车道后,需要判断目标车道是否有条件让本车完成换道,这个判断主要是通过间隙检测来完成的。间隙检测就是说本车变至目标车道后,是否会对目标车道运行的车辆造成影响,包括本车能否安全跟驰目标车道的前车以及目标车道的后车能否安全跟驰本车。Masahiro Kojima 提到用安全系数来评价间隙是否接受,当目标车道的前、后间隙都满足安全系数时,则间隙接受,即:式中,——最小期望间距;
——车长;
——平均减速度;之间的距离;
——前车位置;
——主车车速。
3.执行/不执行换道 a.当间隙检测满足换道要求时就可以进行换道了,现在微观仿真软件常采用的方式是,给换道车辆初始化一个车道偏角,直到车辆完成换道。 总之,换道模型建立在假设的基础之上,且假设的条件多是期望车速、期望运行状态等很难验证与标定的参数,因此模型的可转移性普遍不强。现代交通流建模 现代交通流建模以现代科学技术和方法(如神经网络、人工智能等) 为主要工具来描述车辆行为。其特点是所采用的模型和方法不追求严格意义上的数学推导和明确的物理意义, 而更重视模型或方法对真实交通流的拟合效果。这类模型主要用于对复杂交通流现象的模拟、解释和预测。现代交通流建模主要包含模糊控制和神经网络两大类型。 (1)模糊控制 模糊控制是一种基于模糊逻辑的控制方法,它使用模糊规则来将输入量映射到输出量,以实现对系统的控制。模糊控制通常用于不确定性较大或难以建立准确动态模型的系统控制中。在现实的跟驰行为中,后车驾驶员并不会基于确定的速度、距离等信息,输出确定的加速度来保持对前车的跟踪。驾驶员会基于自身的经验来判断,并采取适合于自身驾驶风格的跟驰规则,这恰好就符合模糊控制的特点。 1999年,Kikuchi和Chakroborty首先利用该理论来模糊化GHR模型(一种刺激-反应跟驰模型),把模型中辆车的速度差、距离差与前车加速度分别设定为6、6、12个利用自然语言描述的子集,进而进行计算,其模糊规则为: 式中,——反应时间; ——表示本车驾驶员希望赶上前车的期望时间。 基于模糊控制的车辆跟驰模型虽然能够融入驾驶员的判断经验,使模型更加趋近于现实情况,但由于隶属度函数是人为设定的,存在一定的误差,在一定程度上会影响到输出结果。 (2)人工智能 人工智能(主要是机器学习和深度学习)在交通流模型中主要用来学习车辆的详细运动特征(也可以应用在上面的模糊控制中),包括纵向加减速和换道过程。
Wei和Liu(2013)[5]提出了一种自学习支持向量回归(support vector regression,SVR)建模方法,该方法首先使用支持向量回归模型对车辆之间的跟驰关系进行建模,并根据历史数据自适应地调整模型参数。然后利用所建立的模型预测车辆的速度和加速度,并将预测结果作为输入来更新模型参数。通过不断地迭代这个过程,模型可以逐渐地适应交通流的演化,从而更准确地预测未来的车辆行为。相比于传统的支持向量回归模型,该方法具有更好的自适应性能,可以更有效地处理跟驰不对称性的问题。
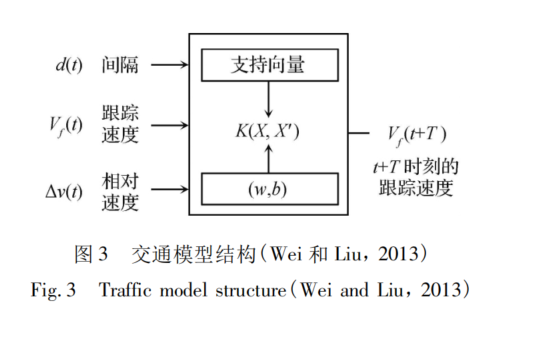 交通模型结构
交通模型结构
Xie 等人( 2019) [6]提出了一种基于深度学习的交通车自主换道模型,将深度置信网络( deep belief network,DBN) 和长短期记忆神经网络( long short-term memory,LSTM) 结合,利用实际换道数据分别训练构建换道决策和换道执行两个模块,集成模型可以准确地预测车辆的换道过程并挖掘换道行为的基本特征。
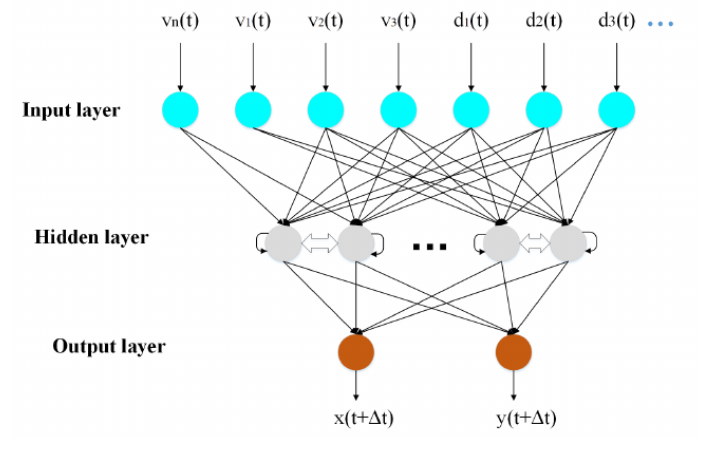 用于LCI模型的LSTM的结构
用于LCI模型的LSTM的结构
使用该类方法,当训练数据的量较小时,模拟结果可能会变得单调,模型不能很好的描述车辆行为;当数据量和数据质量都较好的条件下,该类方法可以较好模拟车辆行为,但可移植性存疑,尤其是将模型应用在另一个物理区域(非数据采集区域),模型的表现有待讨论。另外该类方法只能用于某种类型的智能体(例如车辆),难以模拟不同类型智能体(车与人)在环境中的运动和交互行为,特别是在交通路口模拟方面,汽车和人类之间的相互作用难以捕捉。从广义来看,人工智能还不能替代基于物理机理的模型在交通流建模中的作用。
参考文献
[1] 李新刚. 基于元胞自动机模型的交通系统微观建模与特性研究[D].北京交通大学,2010.
[2] 张洪宾,高兴超.道路交通微观仿真模型研究综述[J].德州学院学报,2007(06):88-92.
[3] SEWALL J . WILKIE D .. LIN M. C.: Interactive hybrid simulation of large-scale traffic. ACM Transactions on Graphics (TOG) 30. 6(2011),135.2.5.6.10
[4] 王殿海, 曲昭伟. 对交通流理论的再认识[J]. 交通运输工程学报, 2001, 1(4): 55-59.
[5] Wei D L and Liu H C. 2013. Analysis of asymmetric driving behavior using a self-earning approach. Transportation Research Part B:Methodological, 47: 1-4 DOI: 10.1016 j.tb.2012.09.003]
[6] Xie D F, Fang Z Z, Jia B and He Z B. 2019. A data driven lane changing model based on deep learning. Transportation Research Part C :Emerging Technologies, 106 : 41-60 [DOI: 10. 1016 /j.trc. 201907.002]
扫描二维码
关注赛目科技

专注智能网联汽车
测试丨验证丨评价研究
作者:仿真事业部-陈旭中
原文标题:交通流模型分类及微观建模
文章出处:【微信公众号:赛目科技】欢迎添加关注!文章转载请注明出处。
-
赛目科技
+关注
关注
0文章
66浏览量
2061
原文标题:交通流模型分类及微观建模
文章出处:【微信号:gh_c85a8e3c0f2a,微信公众号:赛目科技】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
人工智能交通摄像头技术的最新趋势

[VirtualLab] 带有光波导组件的“HoloLens1”型布局建模
基于 Foster 模型的实战建模:如何在仿真软件中设置 SiC 模块的瞬态热阻参数

探索锂电池性能优化:3D成像建模分析辊压工序的科学原理

车联网与智慧交通
中国中车三大轨道交通核心大模型正式发布
详解SPICE器件模型的分类
NanoEdge AI生成的模型库,在keil里面编译后运行,返回都是0,没挑出单分类,怎么解决?
华为与云南交投推出绿美通道交通大模型
海康威视助力德州智慧交通数字化治理体系建设
授时服务器在交通领域中的关键作用与应用

绕组开放型永磁同步电机的建模及应用
您的模型诊断专家MI:助力把好模型质量关

VirtualLab Fusion应用:Herriott池的建模
碳化硅衬底厚度测量中探头温漂的热传导模型与实验验证



评论