 各类机械手的工作原理和功能特点
各类机械手的工作原理和功能特点
梳理、分析了核化工项目中各类机械手的工作原理和功能特点,并就各类机械手的适用场景进行了对比,介绍了在选择和设计机械手时需考虑的因素,总结了当前的研究进展和未来的发展趋势,以期为今后其他项目的机械手设计提供参考。
核化工项目;机械手;远距离操作
国际上对核化工项目的操作水平和安全性要求越来越高,如直接进行检维修操作之前需对放射性设备和热室进行长时间的去污,影响开工时间,同时操作人员受辐照剂量较高,也会带来较多的去污废液;而采用远距离操作方式,待维修设备不必清洗到人员直接操作的去污限值,操作人员无须进入热室内,所受辐照剂量低。因此,核化工项目的维修原则多倾向于远距离维修,机械手的性能和可靠性的提高、远距离操作技术的进步可为远距离维修操作提供更多的方案选择。
1 机械手类型介绍
机械手类型众多,按照驱动原理进行分类[1],主要可分为主从机械手、电随动主从机械手、动力手和剑式机械手[2]。
1.1 主从机械手
主从机械手(图1)可以完成较为灵活、复杂和精细的操作,能够模仿操作人员的动作,具有较好的密封性,可保证工作人员操作环境的安全。其一般成对安装于混凝土、铅或钢制屏蔽墙体的各种尺寸热室中,每个热室屏蔽窗上部安装有两个主从机械手。主从机械手主要有两个机械臂,一个安装在操作前区的冷端(主动臂),另一个安装在热室内的热端(从动臂),它们通过穿墙件连接在一起。操作人员在冷端通过屏蔽窗操作主动臂的每个动作都直接传输至热端的从动臂上,从动臂在热室内进行相同的动作。
机械式主从机械手还包括伸缩臂主从机械手和铰链臂主从机械手两类[3]。伸缩臂机械手可以传递操作人员无辅助手动操作所用的最大作用力,一般尺寸较大,适用于较大的工作空间。铰链臂机械手允许传递的力达中等水平,操作员可以较容易地在无辅助手动操作时重复动作,一般尺寸较小,可用于较小的工作空间。
1.2 电随动主从机械手
电随动主从机械手(图2)有6~7个自由度,构成部件能够提供电助力。从动臂的移动有电机提供的传输力帮助(从动臂的枢轴作用),并通过配重平衡减轻操作员的操作负担,操作工作产生的力传输至主动臂上。
电随动主从机械手的主动臂在操作前区(冷端)安装在穿墙件上。主动臂是一个枢轴伸缩套筒,可以手动移动,也可电力移动,具有能够执行热室工作的必要自由度。主动臂包括一个操作夹钳工作的手柄,它可用于启动电机助力,操作员可通过左手和右手操作此手柄,可固定伸缩套筒和手柄以避免移动,主动臂顶部安装有配重和电驱动装置。
电随动主从机械手的从动臂在热室内(热端)安装在穿墙件上。从动臂与主动臂配对,并直接反映主动臂的所有动作,从动臂可由操作员通过主动臂直接驱动,也可以通过电助力驱动。从动臂配有一个夹钳以执行所有所需操作,夹钳可抓住热室内的部件,夹钳还可夹持操作工具如螺栓钻头来维护或修理部件,可以通过主动臂的动作将从动臂卸下。
1.3 动力手
动力手(图3)是一个在工艺厂房热室中移动的操作系统,用于在工厂热运行阶段,对热室/设备室中的设备进行维护或修理,此外,在核设施退役阶段,动力手将承担拆卸任务。在厂房日常运行时,不使用动力手。动力手的机械手操作、抓取能力很强,由控制装置操作控制,可以完成工程所需的重载操作、起重运输和维修等任务。
动力手的结构与双梁桥式吊车相似,具有用来水平移动的双梁桥架和起重小车。与吊车相比,动力手有一个位于小车下部的伸缩式机械手臂。通过伸缩功能,机械手臂可以垂直移动。通过机械手臂的旋转,动力手可以在热室内的所有位置进行移动。在机械手臂的末端有一个夹钳,夹钳可以实现多种操作,包括使用其他工具。此外,动力手还配备了一个吊钩,用来转运设备。日常运行时,动力手停放在固定的热室内,这一停车位置可以对周围热室进行快速干预,而不需要耽搁过长的运动时间。
1.4 剑式机械手
在核化工项目放化实验室、同位素生产等领域防护工作箱所采用的取样、转运、分装操作工具长期以来一直沿用剑式机械手(即长杆夹钳,图4),此种操作工具是装在铅防护的球承孔中实现前后伸缩动作,并借助球承在一定角度内摆动,实现上、下、左、右动作。
目前,国内后处理厂放化实验室、同位素生产等领域防护工作箱所采用的剑式机械手可实现动作有限(4个自由度),难以完成复杂、精细的操作任务。另外,由于球承质量大,运动惯性较大,启动时很费劲,而欲停止时不能马上停止,剑式机械手操作精度受到了一定的影响。
2 机械手的应用和选择
在核化工项目中,机械手的设计需综合考虑应用场景、载荷能力、操作空间、灵巧性、可靠性等因素,从而选择合适的机械手。
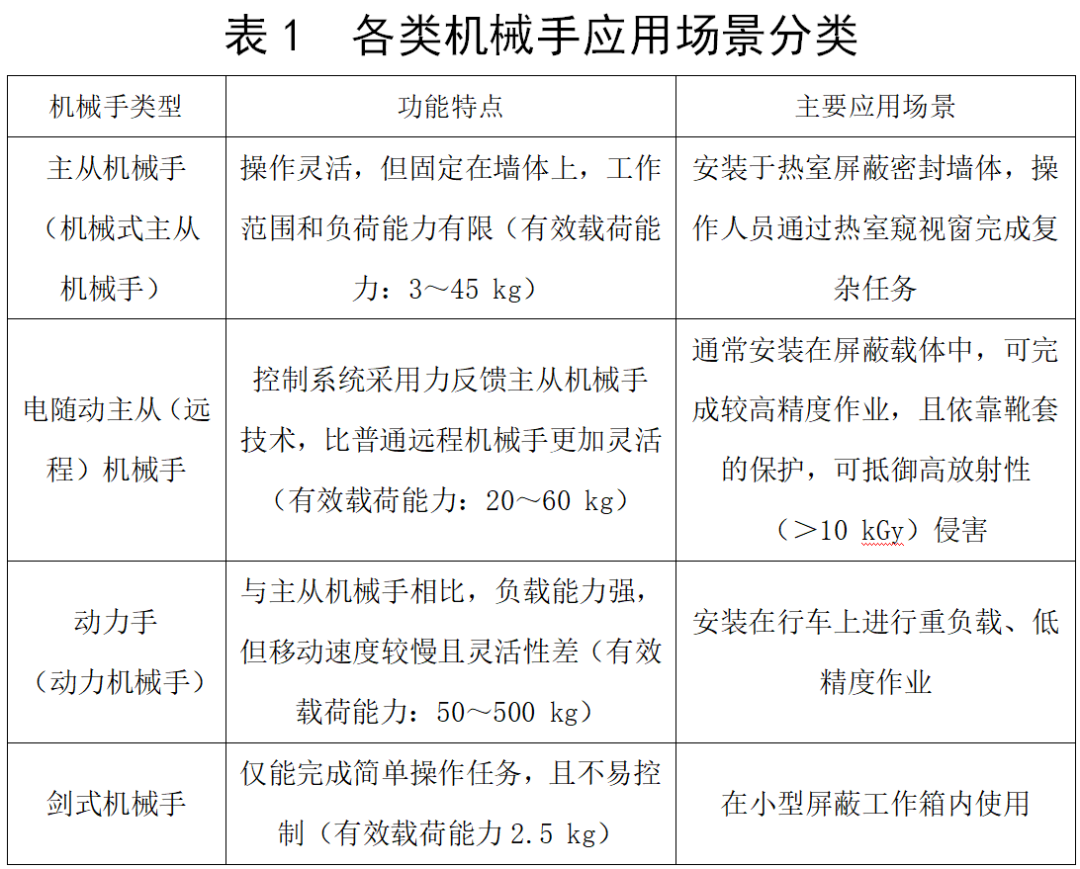
2.1 各类机械手适用的应用场景
表1描述了各类机械手在核化工领域的应用场景。
2.2 载荷能力
在考虑载荷能力时,有必要尽可能精确地定义需要执行的任务,需明确的参数包括所操作的最大以及最可能载荷重量、施加在物品上的作用力、操作人员手臂旋转施加的扭矩、工具(如液压剪、冲击扳手、振动源、高压喷射去污等)的反应、需要吊起的物品重量。
为尽可能延长机械手的使用寿命,应尽量避免在最大载荷能力限值附近频繁使用机械手,决定机械手类型的关键参数一般为操作任务的最大载荷能力。
2.3 操作空间
在设计、选择机械手时,需考虑到屏蔽密封前面板和任何相邻设备或结构的布置,确保机械手可以顺利完成工艺设备操作,应检查、核实操作空间的充分性。
2.4 灵巧性
机械手的灵巧性代表其执行复杂任务的易用性,灵巧性无法量化,对于某个机械手,其灵巧性与所施加的载荷成反比,且机械手的灵巧性可以通过操作人员良好、平稳的动作和最小的反冲(摇晃)来提高。
2.5 可靠性
机械手的可靠性取决于工况,因此,为了获得更好的可靠性,应避免在极端工况下(如频繁在最大载荷能力下使用,由于化学环境的影响导致性能下降,或者未经过充分训练的操作员使用不当等)使用机械手,并充分考虑机械手制造商提供的维护间隔和规程说明。
3 展望和思考
国产机械密封可分离式主从机械手从动臂大多为双伸缩套管结构,主要用于大型热室的远距离操作。近年来,新研制出了单伸缩机械密封可分离式主从机械手,复杂程度较双伸缩结构大为简化,设备故障率大大降低,减少了机械手维修工作量,对于提高设施的开工率有很大意义。新研制出的小型主从机械手已可取代传统小型防护工作箱中大量使用、较为落后的剑式机械手,操作性能可大幅提高,能够实现复杂、精细的操作,具有7个自由度,且有力的反馈,自重轻、尺寸小,同时也促进了箱室结构设计的更新换代。
随着新的自动化技术的发展,机械手的形式越来越多,操作能力大于45 kg的重载主从机械手、电随动主从式机器人、水下机械手以及对现有主从机械手进行改造升级设计具有电动远程控制功能等,均是今后的研究方向。相较于电驱动机械手,液压机械手具有结构更简洁、功能更加强大的机械手臂,在核化工项目中也具有广泛的应用前景。
随着技术的不断进步,未来机械手类设备的性能将会进一步提高,重量轻、结构简单、操作简便、易维修、承载能力大的机械手会更广泛地应用于核化工项目。
-
机械
+关注
关注
8文章
1174浏览量
39613 -
电机
+关注
关注
139文章
8312浏览量
142094 -
操作系统
+关注
关注
37文章
6284浏览量
121877
原文标题:机械手在核化工项目中的应用
文章出处:【微信号:机电信息杂志,微信公众号:机电信息杂志】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐





 工商网监
工商网监
评论